Una guida alla calibrazione della fotocamera per la computer vision nel 2025
Scopri come la calibrazione della fotocamera migliora la visione artificiale correggendo le distorsioni, migliorando la stima della profondità e incrementando la precisione in varie applicazioni di computer vision.

Le fotocamere non vedono il mondo come facciamo noi esseri umani. Spesso finiscono per catturare immagini con distorsioni e variazioni di prospettiva che possono influire sull'accuratezza dei modelli di vision AI. La calibrazione della fotocamera può correggere queste distorsioni e assicurare che i modelli di computer vision possano percepire gli oggetti per come sono realmente nel mondo reale. Questo processo comporta la correzione della distorsione dell'obiettivo, la regolazione della lunghezza focale e l'allineamento dei sensori per aiutare le fotocamere a catturare immagini accurate.
In particolare, una calibrazione accurata della fotocamera è fondamentale per stimare la profondità e misurare le distanze correttamente. I modelli di vision AI come Ultralytics YOLO11 necessitano di input ben calibrati per eseguire svariate attività di computer vision come il rilevamento di oggetti e la stima della posa. Senza immagini di input adeguate, le prestazioni del modello possono calare e portare a errori nelle applicazioni del mondo reale.
Diversi metodi di calibrazione della fotocamera, dai tradizionali motivi a scacchiera alle avanzate tecniche basate sull'IA, possono aiutare a migliorare la precisione. Ad esempio, la calibrazione 3D (tridimensionale) aiuta i modelli a comprendere la profondità, mentre una matrice di calibrazione converte le coordinate del mondo reale nello spazio immagine per una maggiore accuratezza.
In questa guida, tratteremo le basi della calibrazione della fotocamera per la computer vision, inclusi i parametri chiave, i diversi metodi e l'ottimizzazione per le applicazioni di IA nel mondo reale.
Link to this sectionL'importanza della calibrazione della fotocamera nella computer vision#
La calibrazione della fotocamera viene utilizzata per regolare le impostazioni di una fotocamera per garantire che le immagini corrispondano accuratamente alle misurazioni del mondo reale. Garantisce che gli oggetti in un'immagine appaiano nella posizione, dimensione e proporzione corretta, prevenendo distorsioni che potrebbero trarre in inganno i modelli di IA.
Senza un'adeguata calibrazione, le fotocamere possono causare distorsioni dell'obiettivo, facendo apparire gli oggetti allungati o disallineati. Ciò influisce sull'accuratezza del rilevamento di oggetti, del tracciamento e della stima della profondità, portando a errori nelle applicazioni basate sull'IA. In particolare, modelli come YOLO11 funzionano in modo più efficace quando i dati di input sono correttamente calibrati, riducendo gli errori nell'interpretazione spaziale e migliorando il processo decisionale nel mondo reale.
Una calibrazione accurata è particolarmente importante quando si parla di droni, auto a guida autonoma e visione robotica. Il disallineamento in questi sistemi può portare a calcoli errati della distanza, incidendo su attività come la navigazione e il rilevamento di ostacoli.
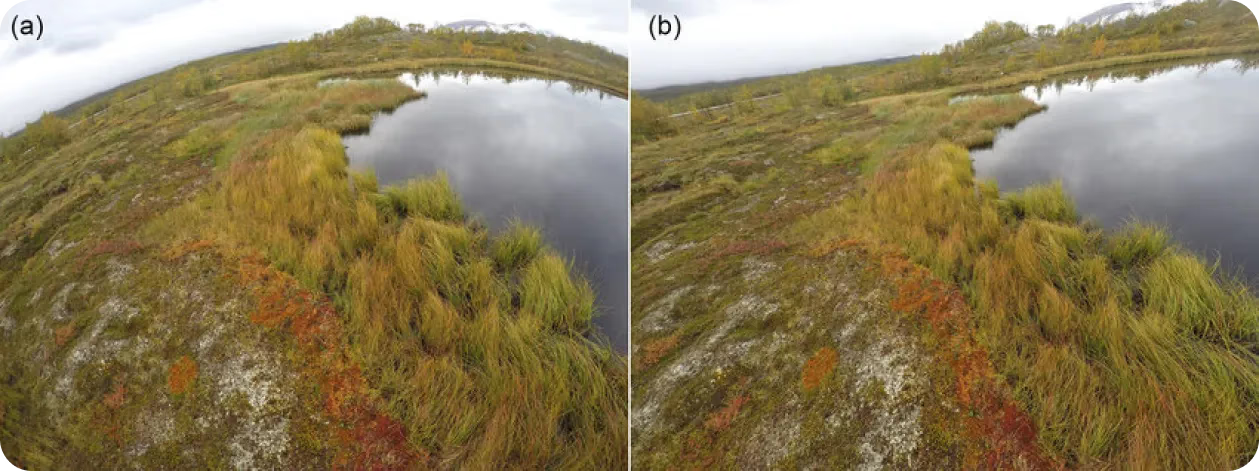
Fig 1. Un esempio di distorsione dell'obiettivo (a sinistra) corretta tramite la calibrazione della fotocamera (a destra).
Link to this sectionEsplorazione degli effetti della distorsione dell'obiettivo#
Le distorsioni dell'obiettivo possono causare un'errata rappresentazione da parte della fotocamera delle forme e delle posizioni degli oggetti in un'immagine. Ecco alcuni esempi di diversi tipi di distorsione dell'obiettivo:
- Distorsione a barilotto: qui le linee rette sembrano curvarsi verso l'esterno, facendo apparire gli oggetti al centro dell'immagine come gonfi. È comune negli obiettivi grandangolari e può disturbare la calibrazione 3D nei sistemi autonomi distorcendo la percezione della profondità.
- Distorsione a cuscinetto: in questo caso, le linee rette si piegano verso l'interno verso il centro dell'immagine, creando l'effetto opposto alla distorsione a barilotto.
- Distorsione a baffi: si verifica quando le distorsioni a barilotto e a cuscinetto si combinano, facendo curvare le linee rette in un motivo a onda.
- Aberrazione cromatica: si verifica quando un obiettivo non riesce a mettere a fuoco i colori nello stesso punto, creando frange colorate attorno agli oggetti.
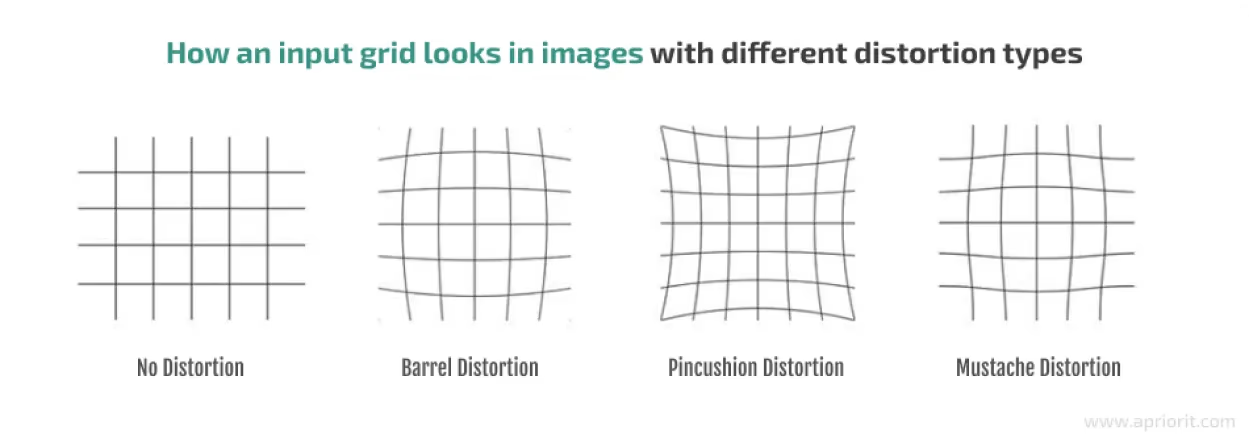
Fig 2. Diversi tipi di distorsioni dell'obiettivo.
Link to this sectionTipi di calibrazione della fotocamera#
La calibrazione della fotocamera consiste in due componenti chiave: i parametri intrinseci, che definiscono le caratteristiche interne della fotocamera, e i parametri estrinseci, che ne determinano la posizione e l'orientamento rispetto al mondo. Diamo un'occhiata più da vicino a entrambi i tipi di componenti.
Link to this sectionParametri intrinseci#
Una calibrazione intrinseca precisa può migliorare le previsioni del modello assicurando che gli oggetti rilevati appaiano nella posizione e nella scala corrette nelle applicazioni del mondo reale. Ecco una rapida panoramica di alcuni parametri intrinseci:
- Lunghezza focale: controlla come una fotocamera proietta oggetti 3D su un'immagine 2D. Se mal calibrata, gli oggetti possono apparire allungati o compressi, alterando la loro dimensione e distanza percepite.
- Punto principale: rappresenta il centro ottico del sensore della fotocamera. Se disassato, può spostare l'intera immagine, portando a un disallineamento nel posizionamento degli oggetti.
- Coefficiente di inclinazione (skew): tiene conto delle disposizioni dei pixel non rettangolari nel sensore. Quando è presente un'inclinazione, l'immagine potrebbe apparire inclinata o deformata invece di essere correttamente allineata.
- Coefficienti di distorsione: questi parametri correggono le distorsioni ottiche causate dall'obiettivo. Senza correzione, le linee rette possono apparire curve, specialmente vicino ai bordi dell'immagine.
Link to this sectionParametri estrinseci#
La calibrazione estrinseca determina come una fotocamera è posizionata e orientata in relazione al mondo reale, il che è particolarmente importante nei sistemi multicamera utilizzati per la calibrazione 3D, il tracciamento degli oggetti e la percezione della profondità. Aiuta droni, veicoli autonomi e sistemi di sorveglianza a interpretare accuratamente le relazioni spaziali.
Ecco due parametri estrinseci chiave:
- Matrice di traslazione: definisce la posizione fisica della fotocamera nello spazio 3D, specificando la sua posizione lungo gli assi X, Y e Z. Se mal calibrata, gli oggetti possono apparire più vicini o più lontani di quanto non siano in realtà, portando a misurazioni errate della distanza. Nei veicoli autonomi, ciò può comportare uno scarso rilevamento degli ostacoli, mentre nella robotica può causare errori di posizionamento durante la manipolazione degli oggetti.
- Matrice di rotazione: determina l'orientamento della fotocamera specificando quanto è inclinata, ruotata o angolata rispetto a un punto di riferimento. Se non calibrata correttamente, le immagini provenienti da più fotocamere potrebbero non allinearsi correttamente, causando problemi nella ricostruzione 3D, nel tracciamento multicamera e nella mappatura spaziale. Ad esempio, in un'auto a guida autonoma, una matrice di rotazione errata potrebbe disallineare gli input dei sensori, portando a un rilevamento inaccurato delle corsie.
Link to this sectionConoscere la matrice di calibrazione della fotocamera#
Ogni immagine catturata da una fotocamera è una rappresentazione 2D di un mondo 3D. I modelli di IA necessitano di un modo per tradurre tra queste dimensioni per effettuare previsioni accurate. È qui che entra in gioco la matrice di calibrazione della fotocamera. Mappa i punti del mondo reale sul piano dell'immagine della fotocamera in modo che gli oggetti appaiano correttamente posizionati.
In parole povere, la matrice di calibrazione della fotocamera è un modello matematico che rappresenta i parametri intrinseci di una fotocamera. È solitamente memorizzata nei sistemi di visione e viene utilizzata negli algoritmi di elaborazione delle immagini per correggere le distorsioni e mappare i punti 3D su coordinate 2D.
Come vedremo in seguito, la matrice viene calcolata utilizzando metodi di calibrazione come il rilevamento di pattern a scacchiera, la calibrazione basata su oggetti 3D e l'autocalibrazione guidata dall'IA, che stimano i parametri chiave analizzando immagini di punti di riferimento noti.
Link to this sectionVari metodi di calibrazione della fotocamera#
Esistono vari metodi di calibrazione della fotocamera, ognuno adatto a casi d'uso specifici. I metodi tradizionali si basano su motivi fisici, mentre le tecniche guidate dall'IA utilizzano il deep learning per automatizzare il processo.
Analizziamo questi metodi ed esploriamo come migliorano l'accuratezza in diverse applicazioni.
Link to this sectionMetodi di calibrazione della fotocamera tradizionali#
Uno dei metodi di calibrazione della fotocamera più comuni utilizza una scacchiera o un motivo a griglia posizionato davanti alla fotocamera. Il sistema rileva punti chiave nel motivo per calcolare i parametri di calibrazione.
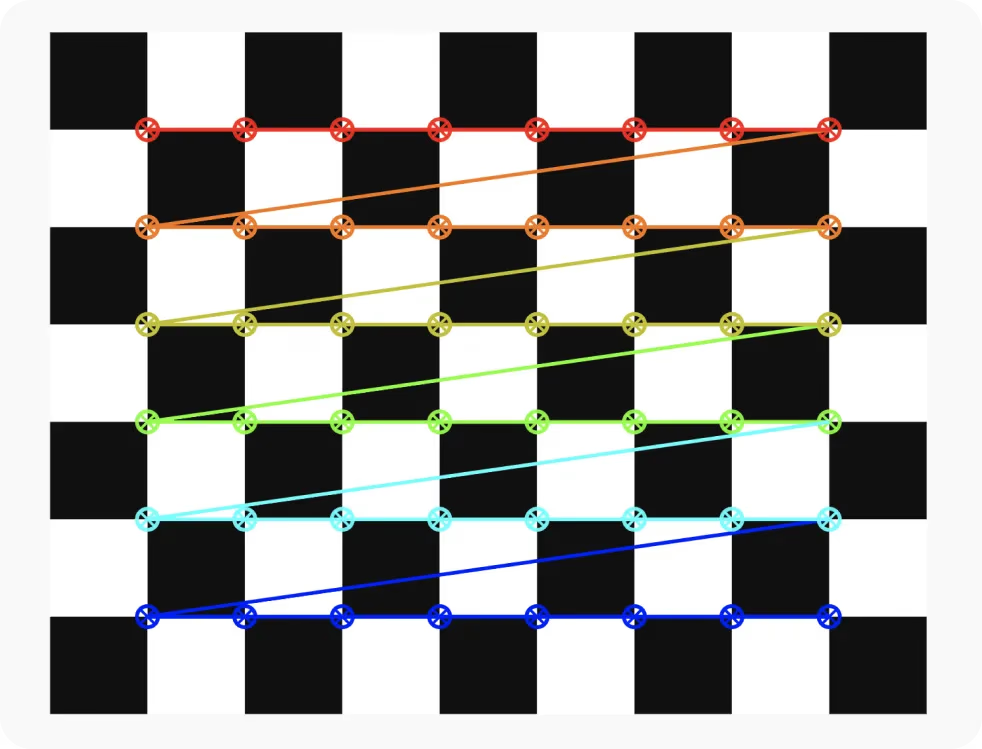
Fig 3. Una scacchiera per la calibrazione della fotocamera.
Sebbene utile in ambienti controllati, richiede regolazioni manuali e l'analisi di più immagini da diverse angolazioni. Cambiamenti nelle condizioni di illuminazione o movimenti imprevisti della fotocamera possono ridurre l'accuratezza, rendendo necessaria la ricalibrazione.
In ambienti dinamici, come droni e auto a guida autonoma, la calibrazione tradizionale fatica a tenere il passo. Una fotocamera in movimento richiede una ricalibrazione frequente per mantenere la precisione, il che è poco pratico con motivi statici. Questa limitazione ha guidato i progressi nella calibrazione della fotocamera guidata dall'IA, offrendo maggiore flessibilità e automazione.
Link to this sectionMetodi di calibrazione della fotocamera basati sull'IA#
Le tecniche basate sull'IA automatizzano la calibrazione della fotocamera utilizzando modelli di deep learning per l'autocalibrazione, riducendo la necessità di regolazioni manuali. Questi metodi stimano i parametri intrinseci ed estrinseci direttamente dalle immagini del mondo reale, eliminando la necessità di motivi predefiniti.
Allo stesso modo, i dataset sintetici stanno trasformando la calibrazione della fotocamera fornendo ai modelli di IA dati di addestramento diversificati ed etichettati per affinare i parametri e correggere le distorsioni. Questi dataset simulano le condizioni del mondo reale, aiutando i modelli di IA a imparare ad adattare i parametri intrinseci ed estrinseci dinamicamente senza input umano.
Ad esempio, i framework di autocalibrazione utilizzano modelli probabilistici e deep learning per analizzare immagini monoculari, stimare strutture 3D e affinare continuamente la calibrazione. I dati sintetici migliorano questo processo addestrando i modelli a gestire prospettive variabili, disallineamenti dei sensori e condizioni di illuminazione, migliorando la stima della profondità, il tracciamento degli ostacoli e l'accuratezza spaziale in applicazioni come la guida autonoma e la robotica.

Fig 4. Un sistema di vision AI autocalibrante in grado di comprendere il traffico.
Link to this sectionPrincipali applicazioni della calibrazione della fotocamera#
Ora che comprendiamo cosa sia la calibrazione della fotocamera, esploriamone l'impatto in vari settori.
Link to this sectionVeicoli autonomi e navigazione tramite droni#
Per le auto a guida autonoma e i droni autonomi, una calibrazione precisa della fotocamera è importante per una navigazione sicura e affidabile. Questi sistemi si basano sulla stima della profondità e sul calcolo della distanza per rilevare ostacoli, tracciare la segnaletica stradale e valutare gli oggetti circostanti. Una calibrazione scadente può causare interpretazioni errate della distanza, portando a decisioni errate in scenari in tempo reale.
Una matrice correttamente calibrata consente ai veicoli autonomi di unire gli input da LiDAR, radar e fotocamere, migliorando la fusione multi-sensore. Questo aiuta il veicolo a valutare accuratamente le distanze da pedoni, confini di corsia e auto vicine, riducendo il rischio di incidenti. Nel frattempo, nei droni, la calibrazione 3D aiuta a mantenere la stabilità dell'altitudine e a tracciare gli oggetti accuratamente per una navigazione precisa in ambienti dinamici.

Fig 5. Una fotocamera calibrata in un'auto a guida autonoma.
Link to this sectionRealtà aumentata (AR) e realtà virtuale (VR)#
Le applicazioni AR e VR si affidano a una calibrazione precisa della fotocamera per allineare i contenuti digitali con gli oggetti del mondo reale. Se non calibrati correttamente, gli overlay AR possono andare alla deriva, apparire disallineati o avere una scala errata, interrompendo l'esperienza utente.
La correzione della distorsione dell'obiettivo è fondamentale per far sì che gli oggetti virtuali si fondano perfettamente con gli ambienti reali. Senza di essa, le distorsioni possono interrompere l'immersione e ridurre l'accuratezza nel gaming, nelle simulazioni di addestramento e nell'imaging medico. Inoltre, nella VR, la calibrazione migliora il tracciamento accurato dei movimenti della testa e delle mani, migliorando la reattività e creando un'esperienza più fluida e coinvolgente.

Fig 6. Una configurazione di calibrazione della fotocamera 3D utilizzata per affinare le misurazioni spaziali.
Link to this sectionVisione robotica e automazione industriale#
Affinché i robot possano vedere e interagire con il mondo accuratamente, un'adeguata calibrazione della fotocamera è cruciale. Nell'automazione industriale, i robot si affidano alla stima della profondità per raccogliere, posizionare e manipolare oggetti con precisione. Senza una calibrazione adeguata, i disallineamenti possono causare errori nel confezionamento, nell'assemblaggio e nelle ispezioni di controllo qualità.
Una sfida chiave nella robotica è misurare accuratamente oggetti piatti. La calibrazione aiuta i bracci robotici a rilevare le dimensioni esatte, prevenendo errori di calcolo che potrebbero rallentare o interrompere la produzione. La calibrazione 3D porta questo aspetto oltre, consentendo ai robot di adattarsi al variare degli oggetti o delle posizioni.
Link to this sectionPunti chiave#
La calibrazione della fotocamera è una componente critica di molte soluzioni di computer vision. Garantisce che i modelli di IA interpretino le immagini accuratamente per attività come il rilevamento di oggetti, il tracciamento e la stima della profondità. I parametri intrinseci ed estrinseci aiutano ad allineare le immagini con le misurazioni del mondo reale per prevenire distorsioni che potrebbero influire sulle applicazioni guidate dall'IA.
La correzione della distorsione dell'obiettivo è critica per le applicazioni di realtà aumentata, l'automazione industriale e i sistemi multicamera. Con il progredire dell'IA, i metodi di calibrazione automatizzata della fotocamera stanno migliorando l'efficienza, l'accuratezza e l'affidabilità a lungo termine nelle applicazioni del mondo reale.






