U-Netアーキテクチャとそのアプリケーションに関するガイド
U-Netアーキテクチャについて学びましょう。画像セグメンテーションをどのようにサポートし、どのようなアプリケーションがあり、なぜコンピュータービジョンの進化において重要なのかを解説します。
コンピュータビジョンは、視覚データの分析に焦点を当てた人工知能(AI)の一分野です。これは、工場の製品検査の自動化や、自律走行車の道路ナビゲーション支援など、多くの最先端システムへの道を切り開いてきました。
最もよく知られたコンピュータビジョンのタスクの一つに物体検出があります。このタスクにより、モデルはバウンディングボックスを使用して画像内の物体を特定および識別できるようになります。バウンディングボックスは様々な用途で役立ちますが、物体の位置を大まかに推定するだけのものです。
しかし、精度が不可欠なヘルスケアなどの分野では、ビジョンAIのユースケースは単に物体を特定するだけでは不十分です。多くの場合、物体の正確な形状や位置に関連する情報も必要とされます。
まさにそのために設計されたのが、コンピュータビジョンのタスクであるセグメンテーションです。セグメンテーションモデルは、バウンディングボックスを使用する代わりに、ピクセル単位で物体を検出します。長年にわたり、研究者はセグメンテーションのための専門的なコンピュータビジョンモデルを開発してきました。
そのようなモデルの一つがU-Netです。より新しく高度なモデルが登場し、その性能を上回っていますが、U-Netはコンピュータビジョンの歴史において重要な位置を占めています。この記事では、U-Netアーキテクチャを詳しく見ていき、その仕組み、使用されてきた場所、そして今日利用可能なより現代的なセグメンテーションモデルとの比較について解説します。
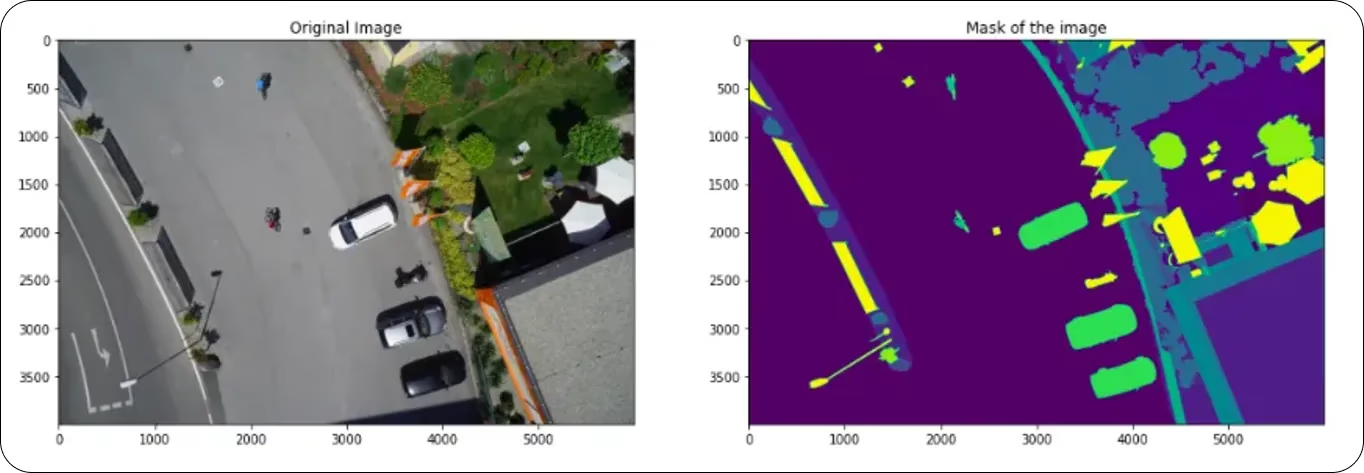
図1。U-Netディープラーニングモデルを使用したセグメンテーションの例。(出典)
Link to this section画像セグメンテーションの歴史#
U-Netについて掘り下げる前に、まずは画像セグメンテーションモデルがどのように進化したのかを詳しく理解しましょう。
当初、コンピュータビジョンは、画像内の物体を分離するために、エッジ検出、しきい値処理、リージョン成長といった従来の手法に依存していました。これらの手法は、エッジを使用した物体境界の検出、ピクセル輝度による領域分離、類似ピクセルのグループ化に使用されていました。単純なケースでは機能しましたが、画像にノイズがある場合や、形状が重なっている場合、境界が不明瞭な場合には失敗することが多くありました。
2012年のディープラーニングの台頭に続き、2014年にはセマンティックセグメンテーションなどのタスク向けに、研究者によって畳み込みニューラルネットワーク(FCN)の概念が導入されました。これらのモデルは、畳み込みニューラルネットワークの特定のパーツを置き換えることで、コンピュータが画像を小さな断片に分解することなく、画像全体を一括して見られるようにしました。これにより、モデルは画像内の内容をより明確に示す詳細なマップを作成できるようになりました。
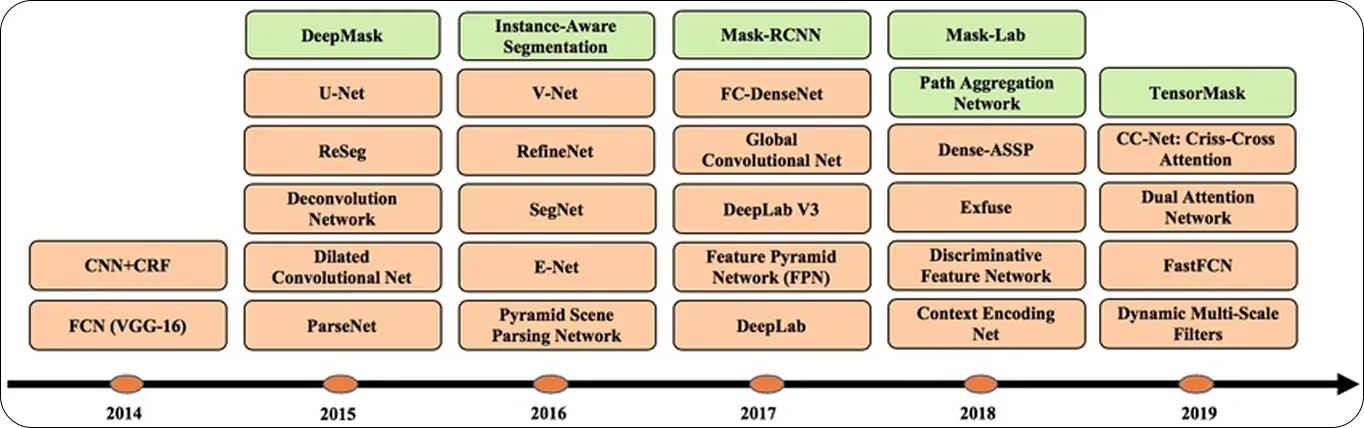
図2。ディープラーニングベースのセグメンテーションアルゴリズムの進化。(出典)
FCNを基盤として、U-Netは2015年にフライブルク大学の研究者によって導入されました。これは元々、バイオメディカル画像セグメンテーション用に設計されたものです。特にU-Netは、アノテーション済みデータが限られている状況で優れた性能を発揮するように設計されました。
一方、UNet++やTransUNetなどの後のバージョンでは、アテンションレイヤーや改善された特徴抽出などのアップグレードが追加されました。アテンションレイヤーはモデルが重要な領域に集中するのを助け、強化された特徴抽出はより詳細な情報を捉えます。
Link to this sectionU-Netとは何か、そして特徴量はどのようにモデル内を流れるのか?#
U-Netは、画像セグメンテーション専用に構築されたディープラーニングモデルです。画像を入力として受け取り、各ピクセルがどの物体や領域に属するかを分類するセグメンテーションマスクを生成します。
このモデルは、そのU字型のアーキテクチャから名付けられました。これは、画像を圧縮して特徴を学習するエンコーダーと、元のサイズに拡大するデコーダーの2つの主要なパーツで構成されています。この設計により左右対称のU字型が形成され、モデルが画像の全体構造と細かい詳細の両方を理解するのに役立ちます。
U-Netの重要な特徴の一つにスキップ接続の使用があります。これにより、エンコーダーからの情報を直接デコーダーに渡すことができます。つまり、画像が圧縮される際に失われてしまう可能性のある重要な詳細を保持できるのです。
Link to this sectionU-Netのアーキテクチャの概要#
U-Netのアーキテクチャの仕組みを簡単に見てみましょう。
- 入力画像: U-Netは、医療用スキャンや衛星写真のような2D画像から始まります。目標は、画像内のすべてのピクセルにクラスラベルを割り当てることです。
- ダウンサンプリング: 画像は、重要な視覚的特徴を学習する畳み込み層を通過します。画像が様々な層を移動するにつれて解像度は低下し、モデルはより広範なパターンを識別します。
- ボトルネック層: ネットワークの中心部では、特徴マップは高レベルの意味的特徴を捉えながら、空間解像度が最小になります。簡単に言えば、この特徴マップの圧縮された表現が、入力の全体的なコンテキストです。
- アップサンプリング: ネットワークは、解像度を徐々に上げることで画像を再構築します。転置畳み込みが、特徴マップを元のサイズに向けて拡大するのに役立ちます。
- スキップ接続: ダウンサンプリング経路からの特徴マップは、アップサンプリング経路の特徴マップと連結されます。これは、高レベルのコンテキスト情報を統合しながら、きめ細かい空間的詳細を保持するのに役立ちます。
- 出力はセグメンテーションマップ: 最終的な出力は、入力サイズと一致するピクセル単位のセグメンテーションマスクです。各ピクセルは、物体、背景、関心領域といったカテゴリに分類されます。
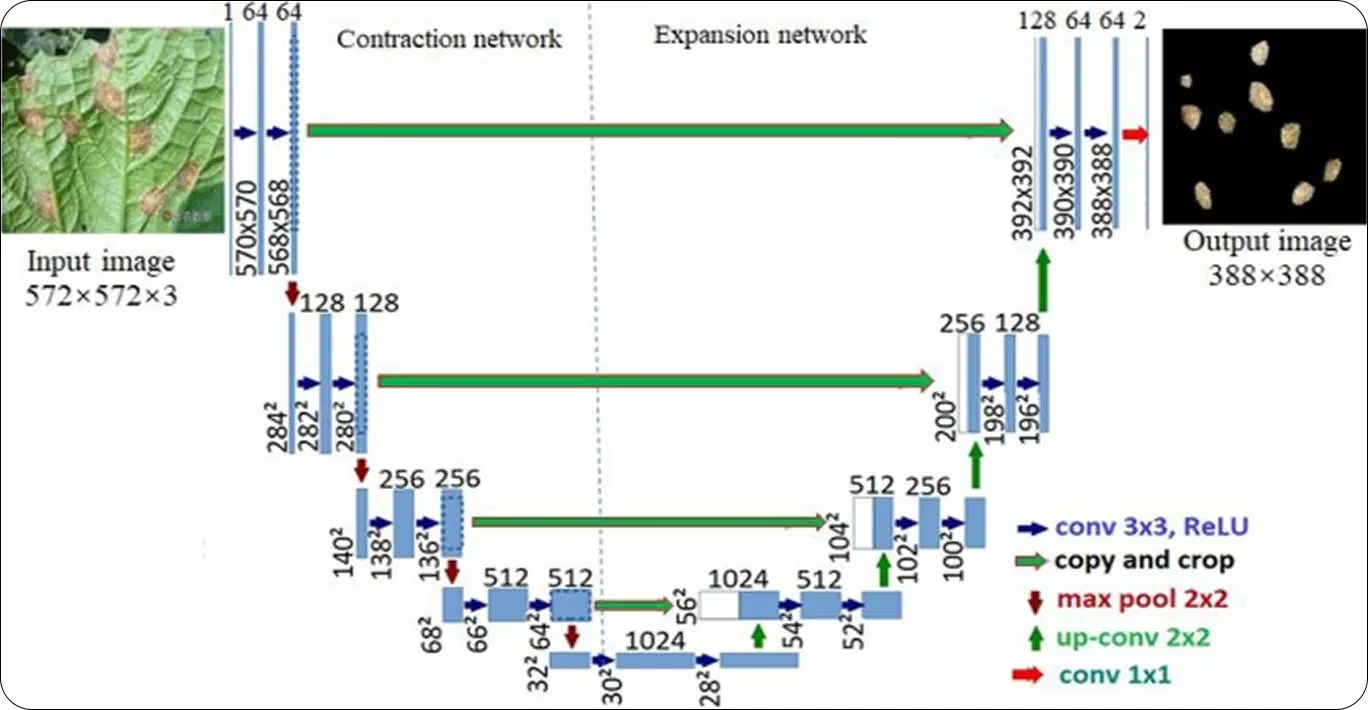
図3。U-Netアーキテクチャ図。(出典)
Link to this sectionViTとU-Netの違いを理解する#
U-Netについて探求する際、同じくセグメンテーションタスクを実行できるVision Transformer (ViT)のような他のディープラーニングモデルと何が違うのか疑問に思うかもしれません。両モデルとも同様のタスクを実行できますが、構築方法やセグメンテーションの処理方法が異なります。
U-Netは、エンコーダー-デコーダー構造の畳み込み層を通じて、ピクセル単位で画像を処理することで機能します。医療用スキャンや自動運転車のシーンなど、正確なセグメンテーションが必要なタスクによく使用されます。
一方、Vision Transformer (ViT)は画像をパッチに分割し、アテンションメカニズムを通じてそれらを同時に処理します。ViTは自己アテンション(モデルが画像内の異なる部分の重要性を相互に比較検討できるようにするメカニズム)を使用して、U-Netの畳み込みアプローチとは異なり、画像の異なる部分が互いにどのように関係しているかを捉えます。
もう一つの重要な違いは、ViTは通常、優れたパフォーマンスを発揮するためにより多くのデータを必要としますが、複雑なパターンを捉える能力に優れている点です。一方でU-Netは、より小さなデータセットでも十分に機能し、学習がより高速で、学習時間も短くて済む場合が多いという利点があります。
Link to this sectionU-Netモデルの応用#
U-Netが何であり、どのように機能するかを理解したところで、U-Netが様々なドメインでどのように応用されてきたかを探ってみましょう。
Link to this section医用画像における脳出血セグメンテーション#
U-Netは、特に研究における全盛期、複雑な医用画像のピクセル単位のセグメンテーションにおいて信頼できる手法となりました。研究者はこれを使用して、CTやMRI画像における腫瘍や内部出血の兆候など、医療スキャン内の重要な領域を強調表示しました。このアプローチは、診断の精度を大幅に向上させ、研究環境における複雑な医療データの分析を効率化しました。
ヘルスケア研究におけるU-Netの影響の一例として、医療スキャンにおける脳卒中や脳出血の特定での使用が挙げられます。研究者はU-Netを使用して頭部スキャンを分析し、懸念のある領域を強調することで、緊急の対応が必要な症例の迅速な特定が可能になりました。
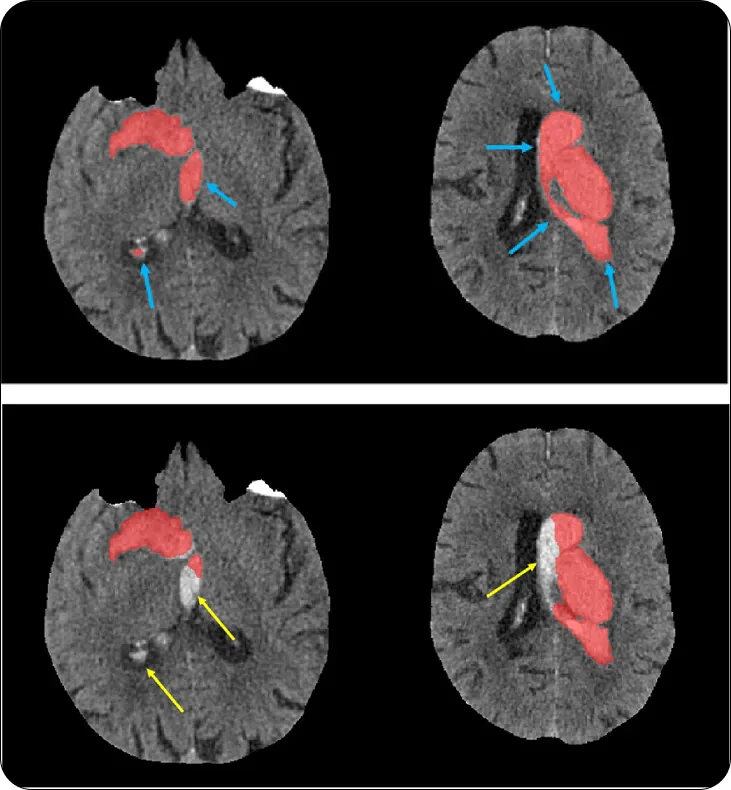
図4。3D U-Netを使用した出血性脳卒中病変のセグメンテーション。(出典)
Link to this section農業における作物セグメンテーション#
研究者がU-Netを使用しているもう一つの分野は農業、特に作物、雑草、土壌のセグメンテーションです。これは農家が植物の健康状態を監視し、収穫量を予測し、大規模な農場全体でより良い意思決定を行うのに役立ちます。例えば、U-Netは作物を雑草から分離できるため、除草剤散布を効率化し、無駄を減らすことができます。
ドローン画像におけるモーションブラーなどの課題に対処するため、研究者は画像デブラー技術でU-Netを改善しました。これにより、航空調査中など、移動しながらデータを収集する場合でも、より明確なセグメンテーションが保証されます。
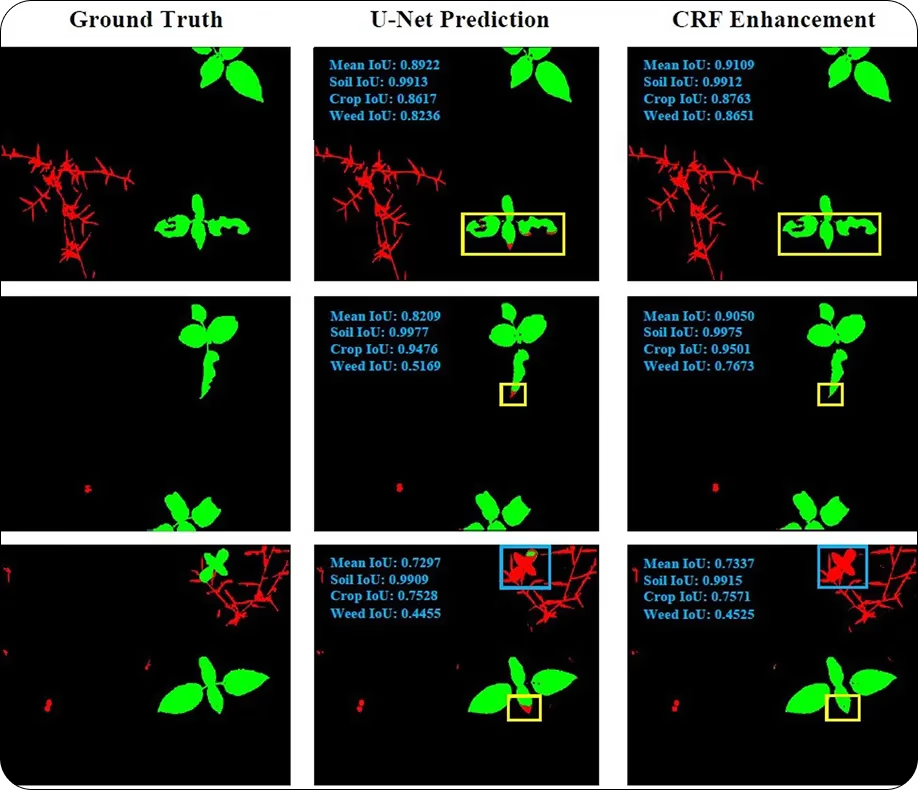
図5。U-Netを使用した農場での作物と雑草の分離。(出典)
Link to this section自動運転#
より高度なAIモデルが導入される前、U-Netはセグメンテーションがいかに自動運転を向上させ得るかを探求する上で重要な役割を果たしました。自動運転車において、U-Netのセマンティックセグメンテーションは、画像内の各ピクセルを道路、車両、歩行者、車線標示などのカテゴリに分類するために使用できます。これにより、車は周囲の状況を明確に把握でき、安全なナビゲーションと効果的な意思決定を支援します。
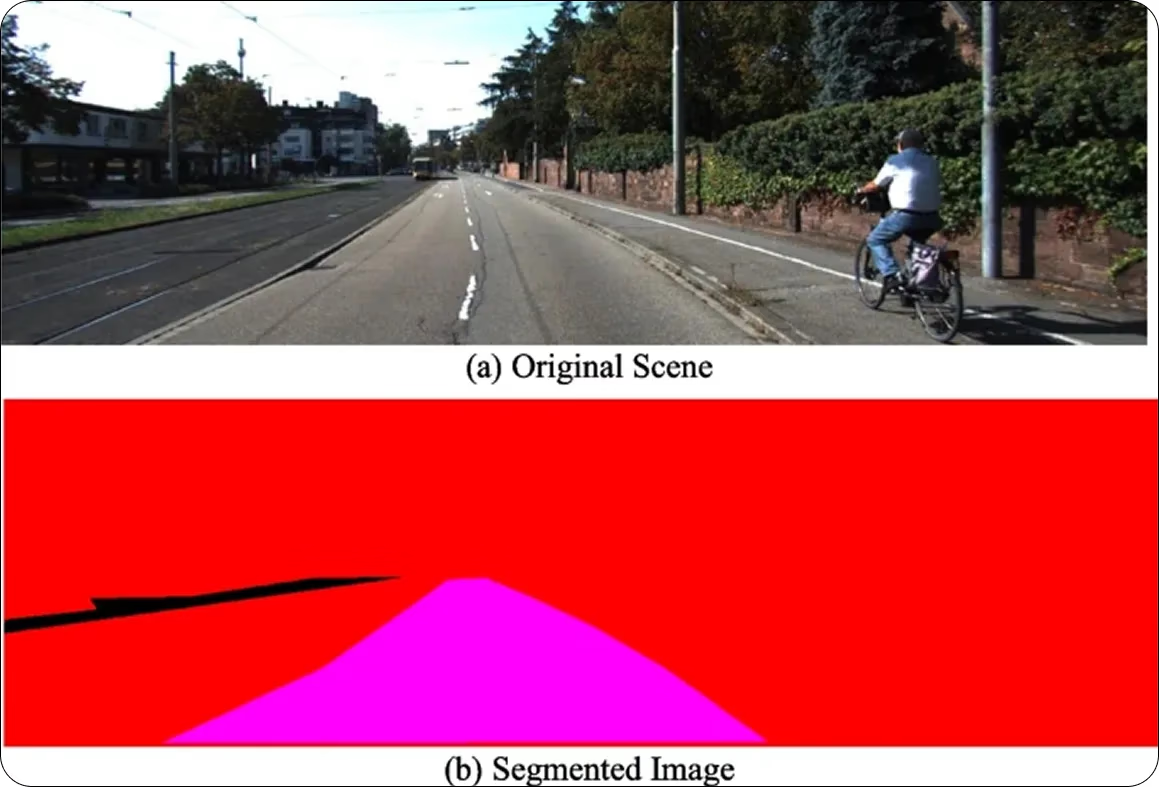
図6。U-Netを使用して走行可能領域がセグメント化された道路シーン。(出典)
Link to this sectionU-Netの長所と短所#
今日でも、U-Netはそのシンプルさ、精度、適応性のバランスの良さから、研究者の間で画像セグメンテーションの有力な選択肢であり続けています。U-Netを際立たせる主な利点をいくつか挙げます:
- 様々なモダリティに適応可能: U-Netは、3D医療スキャン、衛星画像、さらには動画フレームなど、異なるデータタイプに適応されています。
- 最適化時の高速な推論: 適切に調整されれば、U-Netは効率的に実行できるため、リアルタイムまたはリアルタイムに近いアプリケーションに適しています。
- オープンソースとコミュニティ: U-Netは主要なディープラーニングライブラリ全体で利用可能であり、開発者や研究者の巨大なコミュニティによって支えられています。
U-Netには多くの強みがありますが、留意すべき制限もいくつかあります。考慮すべき要素は以下の通りです:
- データ品質に敏感: ノイズの多い画像や低解像度の画像など、品質の低いデータはU-Netのパフォーマンスに悪影響を及ぼす可能性があります。
- 小さなデータセットでは過学習のリスク: U-Netは限られたデータでも優れたパフォーマンスを発揮しますが、データセットが少なすぎる場合や多様性に欠ける場合は、適切に正規化しないと過学習するリスクが依然としてあります。
- 計算リソース: U-Netは、特に大規模なデータセットで作業する場合、計算コストが高くなる可能性があり、学習にかなりのハードウェアリソースを必要とします。
Link to this section重要なポイント#
U-Netは画像セグメンテーションの進化における重要なマイルストーンでした。これは、特に医療画像などの分野において、ディープラーニングモデルがより小さなデータセットを使用して正確な結果を出せることを証明しました。
この画期的な進歩は、様々な分野でより高度なアプリケーションへの道を切り開きました。コンピュータビジョンが進化し続ける中、U-Netのようなセグメンテーションモデルは、機械が視覚データを高精度で理解し解釈できるようにするための基本的な存在であり続けています。
独自のコンピュータビジョンプロジェクトを構築したいですか?私たちのGitHubリポジトリを探索してAIをより深く掘り下げ、ライセンスオプションをチェックしてください。ソリューションページにアクセスして、ヘルスケアにおけるコンピュータビジョンがどのように効率を向上させているか、またリテールにおけるAIの影響をぜひご確認ください!成長を続ける私たちのコミュニティに今すぐご参加ください!






