2025年版 コンピュータビジョンのためのカメラキャリブレーションガイド
カメラキャリブレーションが、歪みを補正し、深度推定を改善し、さまざまなコンピュータビジョンアプリケーションで精度を高めることで、Vision AIをどのように強化するかを学びましょう。

カメラは人間とは異なる方法で世界を認識します。多くの場合、カメラは歪みやパースペクティブの変化を伴う画像をキャプチャし、それがVision AIモデルの精度に影響を与えることがあります。カメラキャリブレーションは、これらの歪みを修正し、コンピュータビジョンモデルが現実世界の物体をありのままに知覚できるようにします。このプロセスには、レンズの歪み補正、焦点距離の調整、およびカメラが正確な画像をキャプチャできるようにするためのセンサーのアライメントが含まれます。
特に、正確なカメラキャリブレーションは、深度推定や正確な距離測定において重要です。Ultralytics YOLO11のようなVision AIモデルは、物体検出や姿勢推定といった様々なコンピュータビジョンタスクを実行するために、適切にキャリブレーションされた入力データを必要とします。適切な入力画像がないと、モデルのパフォーマンスが低下し、現実世界のアプリケーションでエラーが発生する可能性があります。
従来のチェッカーボードパターンから高度なAI駆動型手法まで、様々なカメラキャリブレーション手法が精度の向上に役立ちます。例えば、3D(3次元)キャリブレーションはモデルが深度を理解する助けとなり、キャリブレーション行列は現実世界の座標を画像空間に変換することで精度を向上させます。
本ガイドでは、コンピュータビジョンのためのカメラキャリブレーションの基礎について、主要なパラメータ、様々な手法、そして現実世界のAIアプリケーション向けの最適化を含めて解説します。
Link to this sectionコンピュータビジョンにおけるカメラキャリブレーションの重要性#
カメラキャリブレーションは、画像が現実世界の測定値と正確に一致するようにカメラ設定を調整するために使用されます。これにより、画像内の物体が正しい位置、サイズ、比率で表示されることが保証され、AIモデルを誤導する可能性のある歪みを防ぐことができます。
適切なキャリブレーションを行わないと、カメラはレンズの歪みを生じさせ、物体が引き伸ばされたり、位置がずれて見えたりすることがあります。これは物体検出、トラッキング、深度推定の精度に影響を与え、AI搭載アプリケーションでのエラーにつながります。特にYOLO11のようなモデルは、入力データが適切にキャリブレーションされているとより効果的に機能し、空間解釈のエラーを減らし、現実世界の意思決定を改善します。
正確なキャリブレーションは、ドローン、自動運転車、ロボットビジョンの分野で特に重要です。これらのシステムにおけるアライメントのずれは、不正確な距離計算につながり、ナビゲーションや障害物検知といったタスクに影響を及ぼします。
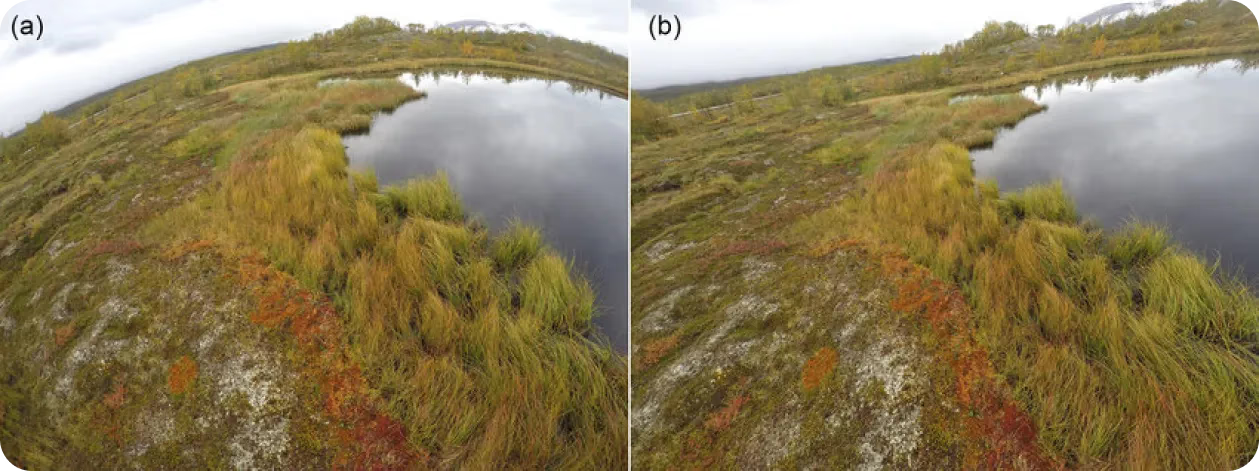
Fig 1。カメラキャリブレーションを使用して補正されたレンズの歪みの例(左:補正前、右:補正後)。
Link to this sectionレンズの歪み効果を探る#
レンズの歪みは、カメラが画像内の物体の形状や位置を誤って表現する原因となります。以下に、様々な種類のレンズ歪みの例を示します。
- タル型歪み(Barrel distortion): ここでは、直線が外側に湾曲して見え、画像中心部の物体が膨らんで見えます。これは広角レンズで一般的であり、深度知覚を歪ませることで自律システムの3Dキャリブレーションを妨げる可能性があります。
- 糸巻き型歪み(Pincushion distortion): この場合、直線が画像中心に向かって内側に曲がり、タル型歪みとは逆の効果を生み出します。
- 口ひげ型歪み(Mustache distortion): これは、タル型歪みと糸巻き型歪みの両方が組み合わさった時に発生し、直線が波のように曲がって見えます。
- 色収差(Chromatic aberration): これは、レンズが色を同じ点に焦点を合わせることができない場合に発生し、物体の周囲に色のフリンジを作り出します。
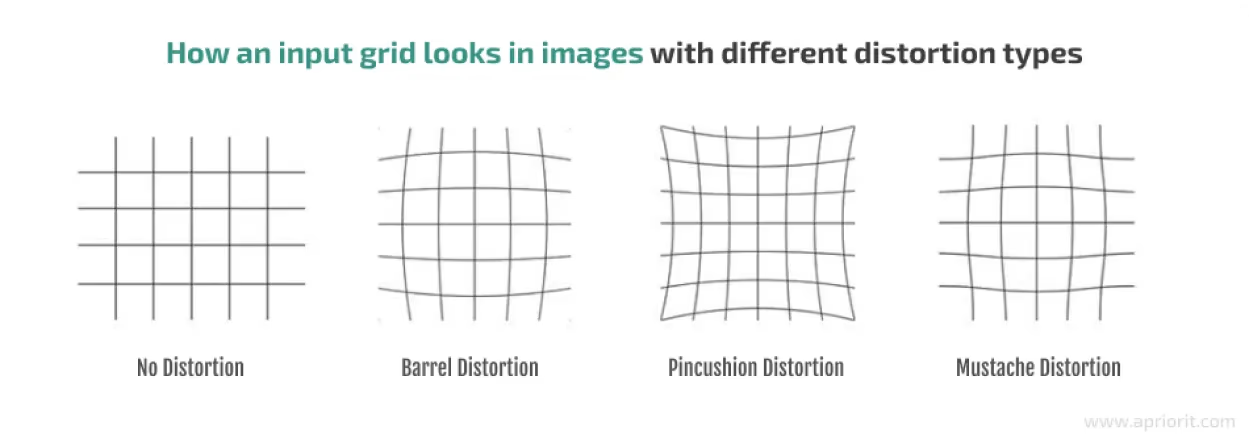
Fig 2。様々な種類のレンズ歪み。
Link to this sectionカメラキャリブレーションの種類#
カメラキャリブレーションは、カメラの内部特性を定義する「内部パラメータ」と、世界に対する位置と方向を決定する「外部パラメータ」の2つの主要な構成要素から成ります。両方のタイプのコンポーネントを詳しく見ていきましょう。
Link to this section内部パラメータ#
精密な内部キャリブレーションは、現実世界のアプリケーションにおいて検出された物体が正しい位置とスケールで表示されるようにすることで、モデルの予測を改善できます。内部パラメータのいくつかを簡単に紹介します。
- 焦点距離: カメラが3D物体を2D画像に投影する方法を制御します。正しくキャリブレーションされていないと、物体が引き伸ばされたり圧縮されたりして見え、知覚されるサイズや距離が変わってしまいます。
- 主点: これはカメラセンサーの光学的中心を表します。オフセットがある場合、画像全体がずれてしまい、物体の配置ミスにつながります。
- スキュー係数: センサー内の非矩形ピクセル配置を考慮します。スキューが存在すると、画像が適切に調整される代わりに傾いたり歪んだりして見えることがあります。
- 歪み係数: これらのパラメータは、レンズによって引き起こされる光学的な歪みを補正します。補正しないと、特に画像のエッジ付近で直線が湾曲して見えることがあります。
Link to this section外部パラメータ#
外部キャリブレーションは、カメラが現実世界に対してどのように配置され、向けられているかを決定するものであり、3Dキャリブレーション、物体追跡、深度知覚に使用されるマルチカメラシステムでは特に重要です。これにより、ドローン、自律走行車、監視システムが空間関係を正確に解釈できるようになります。
以下に2つの主要な外部パラメータを示します。
- 並進行列(Translation matrix): これは3D空間内でのカメラの物理的な場所を定義し、X、Y、Z軸に沿った位置を指定します。正しくキャリブレーションされていないと、物体が実際よりも近く、あるいは遠くに見え、不正確な距離測定につながります。自動運転車では、これが障害物検知の不備につながる可能性があり、ロボット工学では物体操作中に位置決めエラーを引き起こす可能性があります。
- 回転行列(Rotation matrix): これは、基準点に対してどれだけ傾いているか、回転しているか、角度がついているかを指定することで、カメラの向きを決定します。正しくキャリブレーションされていないと、複数カメラからの画像が適切に一致せず、3D再構成、複数カメラ追跡、空間マッピングで問題が発生します。例えば、自動運転車において、不正確な回転行列はセンサー入力をずらし、不正確な車線検知を引き起こす可能性があります。
Link to this sectionカメラキャリブレーション行列を知る#
カメラでキャプチャされたすべての画像は、3D世界を2Dで表現したものです。AIモデルは、正確な予測を行うために、これらの次元間で変換を行う方法を必要とします。ここでカメラキャリブレーション行列の出番となります。これは現実世界の点をカメラの画像平面にマッピングし、物体が正しく配置されて見えるようにします。
簡単に言うと、カメラキャリブレーション行列はカメラの内部パラメータを表す数学的モデルです。これは通常、ビジョンシステムに保存され、歪みを補正し3D点を2D座標にマッピングするための画像処理アルゴリズムで使用されます。
次に見ていくように、この行列は、既知の基準点の画像を分析して主要パラメータを推定するチェッカーボードパターン検出、3D物体ベースのキャリブレーション、AI駆動型セルフキャリブレーションなどのキャリブレーション手法を使用して計算されます。
Link to this section様々なカメラキャリブレーション手法#
様々なカメラキャリブレーション手法が存在し、それぞれが特定のユースケースに適しています。従来の手法は物理的なパターンに依存しますが、AI駆動型手法はディープラーニングを使用してプロセスを自動化します。
これらの手法を確認し、それらがどのようにして様々なアプリケーションで精度を向上させるかを探っていきましょう。
Link to this section従来のカメラキャリブレーション手法#
最も一般的なカメラキャリブレーション手法の一つは、カメラの前に配置されたチェッカーボードやグリッドパターンを使用するものです。システムはパターン内の重要なポイントを検出し、キャリブレーションパラメータを計算します。
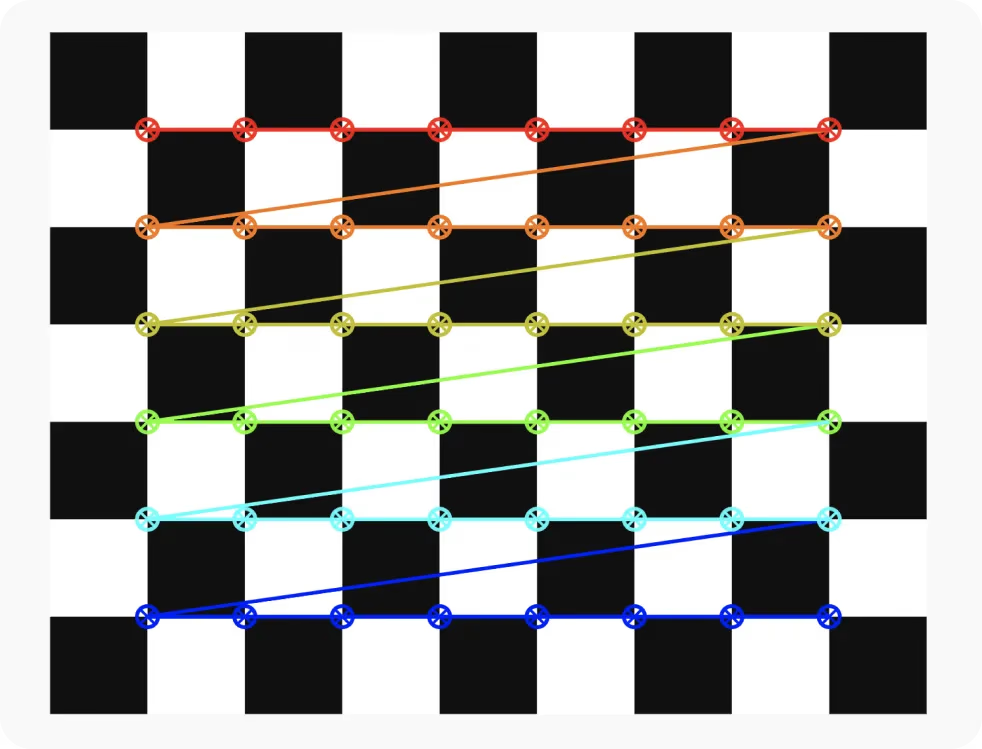
Fig 3。カメラキャリブレーション用チェッカーボード。
管理された環境では有用ですが、手動での調整や異なる角度からの複数の画像の分析が必要です。照明条件の変化や予期しないカメラの動きは精度を低下させる可能性があり、再キャリブレーションが必要となります。
ドローンや自動運転車のような動的な環境では、従来のキャリブレーションでは対応が困難です。移動するカメラは精度を維持するために頻繁な再キャリブレーションが必要であり、静的なパターンでは非現実的です。この限界が、より大きな柔軟性と自動化を提供するAI駆動型カメラキャリブレーションの進歩を後押ししました。
Link to this sectionAI搭載カメラキャリブレーション手法#
AI駆動型手法は、ディープラーニングモデルを使用してセルフキャリブレーションを行うことでカメラキャリブレーションを自動化し、手動調整の必要性を減らします。これらの手法は、現実世界の画像から直接内部および外部パラメータを推定し、事前定義されたパターンの必要性を排除します。
同様に、合成データセットは、AIモデルに多様でラベル付けされたトレーニングデータを提供してパラメータを洗練し、歪みを補正することでカメラキャリブレーションを変革しています。これらのデータセットは現実世界の条件をシミュレートし、AIモデルが人間の介入なしで内部および外部パラメータを動的に調整する方法を学習するのを支援します。
例えば、セルフキャリブレーションフレームワークは、確率モデルとディープラーニングを使用して単眼画像を分析し、3D構造を推定し、キャリブレーションを継続的に洗練します。合成データは、モデルが様々な視点、センサーのずれ、照明条件を扱えるようにトレーニングすることでこのプロセスを強化し、自動運転やロボット工学などのアプリケーションにおける深度推定、障害物追跡、空間精度を向上させます。

Fig 4。交通状況を理解できるセルフキャリブレーション型Vision AIシステム。
Link to this sectionカメラキャリブレーションの主要なアプリケーション#
カメラキャリブレーションとは何かを理解したところで、様々な業界におけるその影響を探ってみましょう。
Link to this section自動運転車とドローンのナビゲーション#
自律走行車や自律型ドローンにおいて、精密なカメラキャリブレーションは安全で信頼性の高いナビゲーションのために重要です。これらのシステムは、障害物を検出し、道路標示を追跡し、周囲の物体を評価するために、深度推定と距離計算に依存しています。不適切なキャリブレーションは距離の誤解を招き、リアルタイムのシナリオで誤った判断を下す原因となります。
適切にキャリブレーションされた行列により、自律走行車はLiDAR、レーダー、カメラからの入力を統合し、マルチセンサーフュージョンを改善できます。これにより、車両は歩行者、車線の境界線、近くの車までの距離を正確に測定でき、事故のリスクを低減します。一方、ドローンでは、3Dキャリブレーションが高度の安定性を維持し、動的な環境での正確なナビゲーションのために物体を正確に追跡するのに役立ちます。

Fig 5。自動運転車に搭載されたキャリブレーション済みカメラ。
Link to this section拡張現実(AR)と仮想現実(VR)#
ARおよびVRアプリケーションは、デジタルコンテンツを現実世界の物体と一致させるために精密なカメラキャリブレーションに依存しています。適切にキャリブレーションされていないと、ARオーバーレイがずれたり、位置が合わなかったり、スケーリングが不正確になったりして、ユーザーエクスペリエンスを損なう可能性があります。
レンズの歪み補正は、仮想物体を現実環境にシームレスに溶け込ませるために不可欠です。それがないと、歪みが没入感を損ない、ゲーム、トレーニングシミュレーション、医療画像処理における精度を低下させる可能性があります。さらにVRでは、キャリブレーションが頭や手の動きの正確な追跡を強化し、応答性を高め、よりスムーズで没入感のある体験を生み出します。

Fig 6。空間測定を洗練するために使用される3Dカメラキャリブレーションセットアップ。
Link to this sectionロボットビジョンと産業オートメーション#
ロボットが世界を正確に認識して対話するためには、適切なカメラキャリブレーションが不可欠です。産業オートメーションでは、ロボットは物体を正確にピックアップし、配置し、操作するために深度推定に依存しています。適切なキャリブレーションがないと、位置合わせのずれが梱包、組み立て、品質管理検査におけるエラーを引き起こす可能性があります。
ロボット工学における一つの重要な課題は、平らな物体を正確に測定することです。キャリブレーションはロボットアームが正確な寸法を検出するのを助け、生産を遅らせたり中断させたりする可能性のある計算ミスを防ぎます。3Dキャリブレーションは、ロボットが物体や位置の変化に応じて適応できるようにすることで、これをさらに一歩進めます。
Link to this section重要なポイント#
カメラキャリブレーションは、多くのコンピュータビジョンソリューションにおいて重要なコンポーネントです。これはAIモデルが物体検出、追跡、深度推定などのタスクにおいて画像を正確に解釈することを保証します。内部および外部パラメータは、AI駆動型アプリケーションに影響を与える可能性のある歪みを防ぐために、画像を現実世界の測定値と一致させるのに役立ちます。
レンズの歪み補正は、拡張現実アプリケーション、産業オートメーション、およびマルチカメラシステムにとって非常に重要です。AIが進歩するにつれ、自動化されたカメラキャリブレーション手法が現実世界のアプリケーションにおける効率、精度、そして長期的な信頼性を向上させています。






