単眼深度推定とは何か?その概要
単眼深度推定の仕組み、センサーベースの深度法との比較、そしてそれがビジョンシステムにおいてどのようにスケーラブルな3D認識を可能にするかを学びましょう。

自動運転車は、安全に走行するために周囲の状況を把握できるように設計されています。これには、歩行者や他の車両といった物体を認識するだけでは不十分です。
また、正しく対応するために、それらの物体までの距離を知る必要があります。しかし、機械にこの距離感を持たせることは容易ではありません。人間とは異なり、機械は画像から自然に深度を認識するわけではなく、その方法を明示的に学習させる必要があります。
その理由の1つとして、ほとんどのカメラが世界を平坦な2次元画像として捉えることが挙げられます。そうした画像を現実世界の深度や3D構造を反映したものに変えるのは難しく、特に日常的な条件下でシステムが確実に機能する必要がある場合は困難です。
興味深いことに、computer vision(視覚データを解釈・理解することに焦点を当てたAIの分野)により、機械が画像から世界をより深く理解することが可能になっています。例えば、単眼深度推定は、1枚のカメラ画像のみを使用して物体の距離を推定するコンピュータビジョンの手法です。
物体のサイズ、遠近法、テクスチャ、陰影などの視覚的手がかりを学習することで、これらのモデルはLiDAR(光による検出と測距)やステレオカメラのような追加のセンサーに頼らずに深度を予測できます。この記事では、単眼深度推定とは何か、その仕組み、そしていくつかの実用的な応用例を探ります。それでは始めましょう!
Link to this section単眼深度推定の簡単な紹介#
単眼深度推定により、機械は1枚の画像のみを使用して物体までの距離を理解できるようになります。1台のカメラのみに依存するため、このアプローチには低コストやハードウェア要件の簡素化といったいくつかの利点があります。
例えば、1台のカメラで動作する安価な家庭用ロボットに使用できます。ロボットシステムは、1枚の画像からでもどの壁が近く、どのドアが遠くにあるかを特定し、空間全体の深度を推論できます。
多くの場合、1枚の画像には正しい縮尺の情報が含まれていないため、単眼深度推定は一般的に相対的な深度に焦点を当てます。言い換えれば、正確な距離がわからなくても、どの物体が近く、どの物体が遠くにあるかを判断できます。
モデルがLiDARなどのセンサーからの深度測定値といった、正解データ(グラウンドトゥルース)または絶対深度を持つデータで学習されると、メートル単位などの現実世界の単位で距離を予測することを学習できます。このような参照データがない場合でも、モデルは相対的な深度を推論することはできますが、絶対的な距離を確実に推定することはできません。
単眼深度推定の出力は通常、深度マップです。これは、シーンの各部分がどれだけ近いか遠いかを表すピクセルで構成された画像です。深度マップは、視覚システムに環境の3D構造の基本的な理解を提供します。

図1. 単眼深度推定を使用して作成された予測深度マップの例 (ソース)
Link to this sectionセンサーから画像へ:深度の推定#
深度推定には、利用可能なセンサー、ハードウェアの制約、精度の要件に応じていくつかの方法があります。従来の手法は、多くの場合、複数の視点や特殊なセンサーを使用して直接距離を測定することに依存していました。
一般的なアプローチの1つはステレオビジョンで、わずかに異なる視点から撮影された2つの同期された画像を比較することで深度を推定します。2つの画像内の対応する点間の差を測定することで、システムは物体がカメラからどれだけ離れているかを推論できます。
もう1つのアプローチはRGB-D(赤、緑、青、および深度)システムで、アクティブ深度センサーを使用して各ピクセルの距離を直接測定します。これらのシステムは、制御された環境では正確な深度情報を提供できますが、追加のハードウェアが必要です。
一方、LiDARベースの手法はレーザーパルスを使用して、シーンの正確な3次元表現を生成します。非常に正確ですが、LiDARセンサーは高価であることが多く、ハードウェアの複雑さを大幅に増大させます。
対照的に、単眼深度推定は1枚のRGB画像のみを使用して深度を推論します。複数のカメラや特殊なセンサーに依存しないため、大規模な展開が容易であり、コストやハードウェアリソースが限られている場合に優れた選択肢となります。
Link to this section1枚の画像からの深度学習#
1枚の画像から深度を推定する際、単眼深度モデルは人間が距離を判断するために本能的に使用する視覚的な手がかりを認識することを学習します。これらの手がかりには、遠近法ライン、物体のサイズ、テクスチャの密度、物体の重なり、陰影などが含まれ、これらすべてが物体がカメラからどれだけ離れているかについてのヒントとなります。
これらの手がかりが組み合わさることで、深度感が生まれます。小さく見える、または部分的に隠れている物体は遠くにあることが多く、詳細がはっきりしており、見た目が大きいものは近くにあることを示唆しています。
これらのパターンを学習するために、単眼深度モデルは大規模な画像データセットで学習され、多くの場合、LiDARやステレオシステムなどの他のソースから得られた深度情報とペアにされます。学習中に、モデルは視覚的な手がかりが深度とどのように関連しているかを学習し、推論時に1枚の画像から距離を推論できるようにします。
多様な学習データにより、現代の視覚モデルは、屋内や屋外のシーンを含む幅広い環境で学習した理解を汎用化でき、馴染みのない視点にも対応できます。
Link to this sectionさまざまな単眼深度推定技術の検討#
次に、1枚の画像から深度を推定するために使用される主なアプローチと、これらの手法がどのように進化してきたかを探ります。
Link to this section古典的および幾何学に基づいたアプローチ#
初期の深度推定手法は、camera geometryに関連する単純な視覚ルールに依存していました。遠近法、物体のサイズ、ある物体が別の物体を遮っているかどうかなどの手がかりを使用して距離を推定していました。
例えば、2つの似たような物体が異なるサイズで表示された場合、小さい方が遠くにあると想定されていました。これらのアプローチは、照明、カメラ位置、シーンのレイアウトなどの要因が一貫している制御された環境では十分に機能しました。
しかし、現実世界のシーンでは、これらの前提が崩れることがよくあります。照明の変動、視点の変化、シーンの複雑さの増大により、深度推定が信頼できなくなり、制御されていない環境での古典的な手法の有効性が制限されます。
Link to this section初期の機械学習アプローチ#
初期の機械学習手法は、データから直接パターンを学習することで、深度推定により多くの柔軟性をもたらしました。固定された幾何学的なルールだけに頼るのではなく、これらのモデルは視覚情報と距離の間の関係を学習しようとし、エッジ、テクスチャ、色の変化などの手がかりに基づいて深度予測を回帰問題として扱いました。
これらの特徴を選択することが、プロセスの重要な部分でした。エンジニアはどの視覚信号を抽出し、それらをどのように表現するかを決定する必要があり、モデルのパフォーマンスはその選択に大きく依存していました。
このアプローチは以前の手法よりも優れていましたが、まだ限界がありました。選択された特徴に重要なコンテキストが欠けている場合、深度予測の精度は低下しました。シーンがより複雑で多様になるにつれて、これらのモデルでは信頼できる結果を得るのが難しくなりました。
Link to this sectionディープラーニングアルゴリズム#
現代のほとんどの単眼深度推定システムは、データから複雑なパターンを学習できる多数の層を持つニューラルネットワークであるディープラーニングを使用しています。これらのモデルは、画像から直接深度を予測し、深度マップを生成することを学習します。
多くのアプローチは、エッジや形状などのパターンを検出することで画像を処理するように設計されたニューラルネットワークの一種であるconvolutional neural networks (CNNs)を使用して構築されています。これらのモデルは多くの場合、エンコーダー・デコーダー設定を使用します。エンコーダーが画像から視覚的特徴を抽出し、デコーダーがそれらの特徴を深度マップに変換します。画像を複数のスケールで処理することで、モデルは明確な物体境界を捉えながら、シーン全体のレイアウトを理解しやすくなります。
より最近のモデルは、画像内の異なる領域間の関係を理解することに焦点を当てています。TransformerベースおよびVision Transformer (ViT)モデルは、モデルが画像のどの領域が最も重要かを特定し、遠く離れた領域同士を関連付けることを可能にするアテンションメカニズムを使用しています。これは、モデルがシーン全体を通してより一貫した深度の理解を構築するのに役立ちます。
一部のシステムは両方のアイデアを組み合わせています。ハイブリッドCNN–Transformerモデルは、CNNを使用して微細な局所的詳細を捉え、Transformerを使用してシーンのグローバルなコンテキストをモデル化します。これは多くの場合精度を向上させますが、通常、追加のメモリや処理能力などのより多くの計算リソースを必要とします。
Link to this sectionなぜ視覚AIシステムにとって深度の理解が重要なのか#
単眼深度推定について学ぶ中で、なぜ深度の理解が視覚ベースのAIシステムにとってそれほど重要な要素なのか疑問に思うかもしれません。
システムが物体や表面がどれだけ離れているかを推定できると、シーンがどのように配置されているか、さまざまな要素が互いにどのように関係しているかをよりよく理解できるようになります。この種の空間認識は、自動運転のような現実世界のアプリケーションで信頼できる意思決定を行うために不可欠です。
深度情報は、他のコンピュータビジョンタスクにも価値のあるコンテキストを追加します。例えば、Ultralytics YOLO26などのモデルによってサポートされる物体検出は、シーンに何が存在するかをシステムに伝えることができますが、深度はそれらの物体がカメラに対して、また互いに対してどこに配置されているかを答えるのに役立ちます。
これらの機能が組み合わさることで、3Dマップの構築、複雑な環境でのナビゲーション、シーン全体の理解など、幅広い視覚AIアプリケーションが可能になります。
ロボットや自動運転車は、安全に移動し、障害物を回避し、リアルタイムで変化に対応するためにこの情報に依存しています。例えば、Tesla’s vision-only drivingアプローチは、物体がどれだけ離れているか、道路上のどこに配置されているかを理解するために、LiDARではなく、カメラ画像と深度推定を組み合わせています。
Link to this section単眼深度推定モデルの仕組み#
モデルのアーキテクチャは異なりますが、ほとんどの単眼深度推定モデルは、1枚の画像を深度マップに変換するために同様のプロセスに従います。関連する主要な手順の概要を次に示します。
- 入力と前処理: ワークフローは入力画像から始まります。モデルに渡される前に、元の画像は通常、サイズ変更、正規化され、ニューラルネットワークが画像データを効率的に処理するために使用する形式であるテンソルに変換されます。
- 特徴抽出: エンコーダーネットワークは画像を分析して、意味のある視覚的特徴を抽出します。これらの特徴は、テクスチャ、物体の境界、シーン全体のレイアウトなどの情報を捉えます。ほとんどのモデルは複数のスケールで動作するため、詳細とグローバル構造の両方を理解できます。
- 深度推論: 抽出された特徴を使用して、モデルは局所的な詳細とグローバルなコンテキストを組み合わせて、シーン内の空間的な関係について推論します。この段階で、モデルは画像のどの領域がカメラに近く、どれが遠いかを学習します。
- 深度マップ生成: デコーダーは、この情報を密な深度マップに変換します。画像の各ピクセルには、精度と一貫性を向上させるために異なるスケールからの予測をブレンドすることによって、多くの場合、深度値が割り当てられます。
Link to this section単眼深度推定モデルの学習方法#
これまで説明してきたプロセスは、すでに学習済みまたは事前学習済みのモデルがあることを前提としています。しかし、単眼深度推定モデルの学習は実際にはどのように機能するのでしょうか?
学習は、ネットワークで効率的に処理できるように画像データを準備することから始まります。入力画像は一貫したスケールにサイズ変更および正規化され、モデルを通過して各ピクセルの距離を推定する予測深度マップを生成します。
次に、予測深度マップは、モデルの予測が正解の深度からどれだけ離れているかを測定する損失関数を使用して、参照深度データと比較されます。この損失値はモデルの現在の誤差を表し、改善のための信号を提供します。
オプティマイザーはこの信号を使用して、内部ウェイトを調整することでモデルを更新します。これを行うために、オプティマイザーは損失が各モデルパラメーターに対してどのように変化するかを記述する勾配を計算し、これらの更新をエポック(学習データセット全体を通す回数)にわたって繰り返し適用します。
この反復的な教師あり学習プロセスは、各更新ステップの大きさを制御する学習率や、一度に処理される画像の数を決定するバッチサイズなどのハイパーパラメーターによって導かれます。学習には膨大な数の数学的操作が含まれるため、通常、並列計算に適したグラフィックス処理ユニット(GPU)を使用して加速されます。
学習が完了すると、モデルは学習中に使用されなかった画像で構成される検証セット上の標準的な評価指標を使用して評価されます。この評価は、モデルが新しいデータに対してどれだけ汎用化できるかを測定するのに役立ちます。
学習済みのモデルは、新しいシナリオのために再利用または微調整(ファインチューニング)できます。全体として、この学習プロセスにより、単眼深度推定モデルは、3D再構成や現実世界への展開などのダウンストリームタスクに不可欠な、一貫性のある深度推定を生成できるようになります。
Link to this section最先端のモデルと研究トレンドの探求#
単眼深度推定は、モデルが小さな視覚的詳細だけでなく、シーン全体を理解できるようになるにつれて急速に改善されています。以前のアプローチでは、特に複雑な環境で、不均一な深度マップが生成されることがよくありました。
arXivで公開された最近の研究に見られるように、より新しいモデルはグローバルなコンテキストに焦点を当てており、より安定した現実的な深度予測につながっています。MiDaSやDPTなどの有名なモデルは、多様な高解像度データセットから深度を学習し、多くのシーンにわたってうまく汎用化することで、この変化を推進しました。
ZoeDepthやDepth Anything V2を含むより最近のモデルは、幅広い設定で強力なパフォーマンスを維持しながら、スケールの一貫性を改善することでこの研究に基づいています。この種の進歩は、多くの場合、屋外シーンと屋内シーンの両方をカバーするKITTIやNYUなどの一般的なベンチマークデータセットを使用して測定されます。
もう1つの明確なトレンドは、精度と実用性のバランスです。より小さなモデルは速度のために最適化されており、エッジデバイスやモバイルデバイスでリアルタイムに実行できますが、より大きなモデルはより高い解像度と長距離の深度精度を優先します。
Link to this section単眼深度推定の応用#
次に、単眼深度推定が1枚の画像からシーンの3D構造を推論するためにどのように使用されるかを示す、現実世界の例をいくつか見ていきましょう。
これらのすべての場合において、深度情報は視覚的な手がかりから推論された推定値であり、正確な測定値ではないことに留意することが重要です。このため、単眼深度推定は相対的なレイアウトや空間関係を理解するのには役立ちますが、LiDARやステレオシステムのように距離を正確に測定するために設計されたセンサーの代わりにはなりません。
Link to this sectionドローンベースの地形マッピングとナビゲーション#
Dronesは、森林、建設現場、災害地域、密集した都市部など、GPS信号が信頼できない環境で動作することがよくあります。これらの条件下で安全に飛行するには、周囲の地形を理解し、障害物がどれだけ離れているかを知る必要があります。過去には、これには通常、LiDARやステレオカメラなどのセンサーを追加する必要があり、重量、消費電力、全体的なコストが増加していました。
単眼深度推定は、より単純な代替手段です。1台のRGBカメラのみを使用して、ドローンは画像から深度を推定し、環境の基本的な3D理解を構築できます。これにより、建物、木、地形の突然の変化などの障害物を検出し、リアルタイムで飛行経路を調整できます。
これらの深度推定は、障害物回避、高度制御、安全な着陸など、主要なナビゲーションタスクをサポートします。その結果、軽量のドローンは、特殊な深度センサーに頼ることなく、マッピング、検査、ナビゲーションタスクを実行できます。
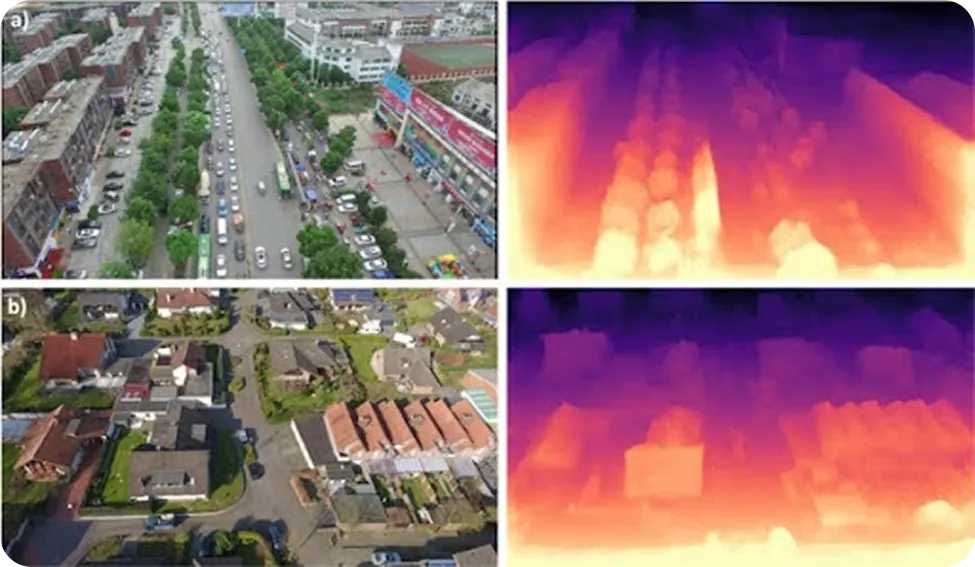
図2. 単眼深度推定を使用してドローン画像を分析できる (ソース)
Link to this section自律レーシング車両の死角を埋める#
自律車両は通常、LiDARセンサーに大きく依存しており、レーザーパルスを使用して距離を測定し、道路の3Dビューを構築します。非常に正確ですが、LiDARは急な道路の頂上、急斜面、遮蔽、突然の車両のピッチなどで苦労することがあり、まばらな、または欠落した深度データを返すことがあります。
単眼深度推定は、LiDARデータが不完全な場合でも、1枚のRGB画像から密な深度情報を提供することで、これらのギャップを埋めるのに役立ちます。self-driving carが高速で丘の頂上に近づいているシナリオを考えてみてください。LiDARビームは頂上の先の道路をオーバーシュートする可能性があり、前方に何があるかについて不確実性が残ります。
しかし、カメラベースの深度推定は、遠近法やテクスチャなどの視覚的手がかりから道路の形状を推論できるため、LiDARデータが安定するまで車両が信頼できる知覚を維持するのに役立ちます。LiDARと単眼深度推定を組み合わせることで、より安定した知覚と、困難な運転条件下でのより安全な制御が可能になります。
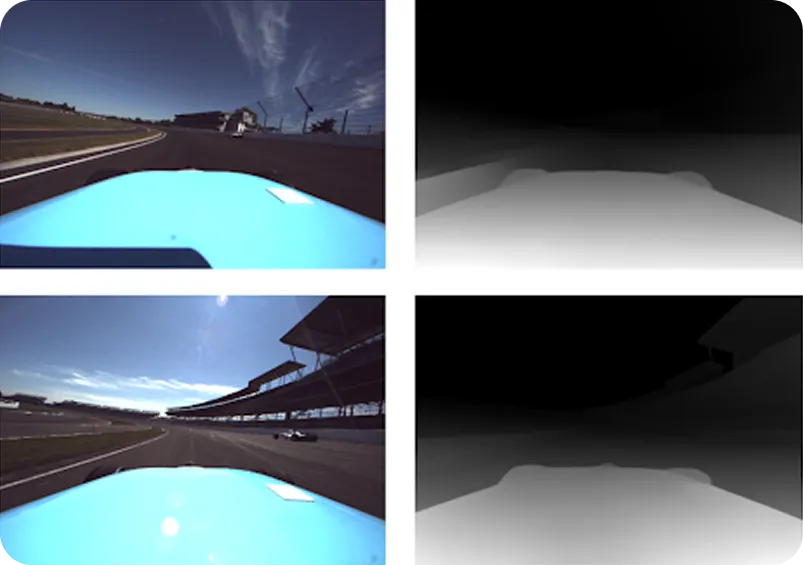
図3. 自律レーシングに単眼深度推定を使用する視覚化 (ソース)
Link to this sectionロボットのナビゲーションと障害物回避#
ロボットは、詳細な地図が利用できず、状況が常に変化する場所で操作されることがよくあります。安全に移動するには、周囲にどれだけのスペースがあり、障害物がどこにあるかについての信頼できる感覚が必要です。
単眼深度推定は、重くて高価なハードウェアに頼ることなく、1台のRGBカメラを使用してこの空間認識を提供できます。スケールや遠近法などの視覚的手がかりを学習することで、深度推定モデルは周囲の密な深度マップを生成できます。これにより、ロボットは表面や物体までの距離を明確に把握できます。
特に、深度情報がobject detectionやセマンティックsegmentationなどのコンピュータビジョンのタスクと組み合わされると、ロボットは環境をより完全に把握できます。ロボットは物体を特定し、それまでの距離を理解し、どこに移動するのが安全かを決定できます。これは、障害物回避、フリースペース検出、リアルタイムの経路計画をサポートします。
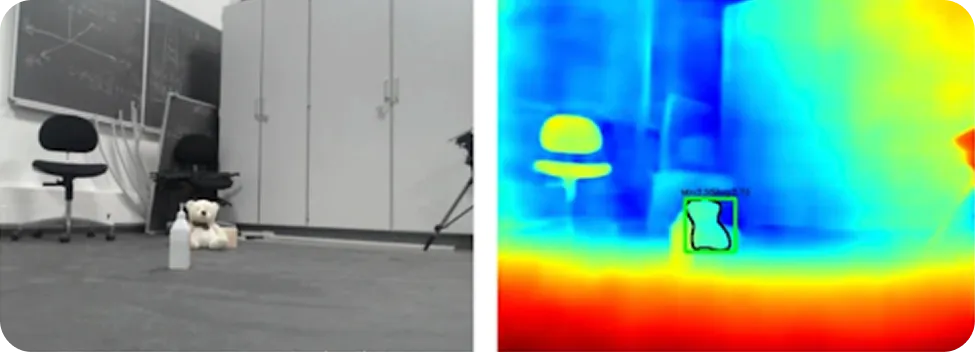
図4. 単眼深度推定と物体検出を使用した物体の検出 (ソース)
Link to this section単眼深度推定の長所と短所#
単眼深度推定を使用する主な利点をいくつか挙げます:
- 軽量で電力効率が良い: 1台のカメラを使用することでシステムの重量と消費電力が削減され、これはモバイルロボット、ドローン、埋め込みシステムにとって特に重要です。
- センサーフュージョンに適している: 単眼深度は、ギャップを埋めたり冗長性を提供したりすることで、LiDARやレーダーなどの他のセンサーを補完できます。
- 多くの環境で機能する: 同じカメラベースのアプローチを、ハードウェアの変更を必要とせずに、屋内、屋外、およびさまざまなプラットフォームで使用できます。
単眼深度推定には明確な利点がありますが、考慮すべき制限がいくつかあります:
- アクティブセンサーよりも精度が低い: 急速に改善されていますが、単眼深度推定は通常、制御された条件下でのLiDARや構造化光センサーの絶対的な精度には及びません。
- 照明条件に対する感度: 低照度環境、強い影、グレア、またはテクスチャが乏しいシーンでは、パフォーマンスが低下する可能性があります。
- 汎用化の課題: ある環境で学習されたモデルは、適応や微調整なしに、見慣れないドメインに常に確実に転送できるとは限りません。
Link to this section単眼深度推定に頼るべきではない場合#
単眼深度推定は興味深い研究分野ですが、実用的に使用できる場所と使用できない場所を理解することが重要です。それが生成する距離は、モデルが画像内で見るものに基づいた推定値であり、現実世界から取られた正確な測定値ではありません。
このため、結果の品質は、照明、シーンの複雑さ、シーンがモデルの学習内容とどれだけ似ているかなどの要因によって変化する可能性があります。単眼深度推定は通常、何が近く、何が遠くにあるかを伝えるのには適していますが、正確な距離が必要な場合には信頼できません。
安全性が重要なシステム、産業用検査、または物体と非常に正確に相互作用する必要があるロボットなど、精度が非常に重要な状況では、深度を直接測定する必要があります。LiDAR、レーダー、ステレオカメラ、または構造化光システムなどのセンサーは、このために設計されており、はるかに信頼できる距離情報を提供します。
単眼深度推定は、視覚的に困難な条件下でも苦労する可能性があります。不十分な照明、強い影、反射や透明な表面、霧、煙、または視覚的なテクスチャがほとんどないシーンはすべて、深度推定の信頼性を低下させる可能性があります。長距離の深度推定も、専用のセンサーが通常より適切に機能するもう1つのケースです。
現実世界におけるソリューションにおいて、単眼深度推定は単独のソリューションとしてよりも、補助的なツールとして最も効果を発揮します。有用な空間的コンテキストを追加し、他のセンサーが制限されている場合のギャップを埋め、シーン全体の理解を向上させるのに役立ちます。ただし、精度、安全性、または厳格な信頼性が求められる場合には、深度情報の唯一のソースとすべきではありません。
Link to this section重要なポイント#
単眼深度推定は、単一のカメラ画像のみを使用して機械がオブジェクトまでの距離を推定できるようにするコンピュータビジョンの技術です。パースペクティブ(遠近感)、オブジェクトサイズ、テクスチャ、陰影といった視覚的な手がかりを学習することで、これらのAIモデルはLiDARやステレオカメラのようなセンサーに頼ることなく、シーンの3D構造を推論できます。これにより、単眼深度推定は、自動運転、ロボット工学、3Dシーン理解といったアプリケーションにとって費用対効果が高く、スケーラブルなアプローチとなります。
ビジョンAIの詳細については、私たちのGitHub repositoryにアクセスし、私たちのcommunityに参加してください。AI in roboticsやcomputer vision in manufacturingに関する詳細については、ソリューションページをご覧ください。コンピュータビジョンを始めるために、our licensing optionsをご確認ください!