Ultralytics YOLO26:エッジファーストVision AIの新たな基準
Ultralytics YOLO26がエンドツーエンドのNMSフリー推論、CPUパフォーマンスの高速化、本番展開の簡素化により、エッジファーストなVision AIの新たな基準をどのように設定するかを学びます。
本日、Ultralyticsはこれまでで最も先進的かつデプロイ可能なYOLOモデルであるYOLO26を正式に発表します。YOLO Vision 2025 (YV25)で初めて発表されたYOLO26は、コンピュータービジョンモデルの学習、デプロイ、そして実世界システムへのスケーリング方法における根本的なシフトを象徴しています。
Vision AIは急速にエッジへと移行しています。デバイス、カメラ、ロボット、組み込みシステム上で画像やビデオを直接処理するケースが増えており、そこではクラウドの生コンピューティング能力以上に、レイテンシ、信頼性、コストが重要視されています。YOLO26はこの現実に合わせて設計されており、CPU、エッジアクセラレータ、低電力ハードウェア上で効率的に動作しながら、世界トップクラスのパフォーマンスを提供します。
YOLO26は大きな飛躍を遂げていますが、開発者が信頼を寄せる馴染み深い合理化されたUltralytics YOLOの操作性はそのまま維持されています。既存のワークフローにシームレスに適合し、幅広いビジョンタスクをサポートし、かつ使いやすいため、研究チームと本番環境チームの両方にとって導入が容易です。

図1:物体検出にUltralytics YOLO26を使用した例
この記事では、Ultralytics YOLO26について知っておくべきすべてのことと、より軽く、小さく、高速なYOLOモデルがVision AIの未来に何を意味するのかを解説します。それでは始めましょう!
Link to this sectionUltralytics YOLO26はVision AIの新たな標準を確立します#
Ultralytics YOLO26は、インパクトのあるVision AIの機能を誰もが簡単に利用できるべきだという考えに基づいて構築されています。私たちは、強力なコンピュータービジョンツールが特定の組織に制限されたり、独占されたりしてはならないと考えています。
ロンドンで開催されたYV25において、当社の創設者兼CEOであるGlenn Jocherは、このビジョンについて次のように述べました。「最も素晴らしいAI技術が閉ざされた場所にあります。オープンではありません。大企業が新しい開発をコントロールし、他の誰もがアクセスするために列に並ばなければなりません。Ultralyticsには異なるビジョンがあります。私たちはAIをすべての人の手に届けたいのです。」
彼はさらに、これはAIをクラウドから取り出し、現実世界の環境にもたらすことを意味すると説明し、こう付け加えました。「私たちはテクノロジーがクラウドの中に留まるだけでなく、エッジデバイス、電話、車両、そして低電力システムへと浸透することを望んでいます。そして、ソリューションを生み出している素晴らしい人々に、その技術へのアクセス権を持ってほしいのです。」
YOLO26は、プロトタイプを作るのが最も簡単な場所ではなく、Vision AIが実際にデプロイされる場所で実行できるように設計されたモデルであり、このビジョンを実践しています。
Link to this sectionUltralytics YOLO26の分解:最先端のビジョンモデル#
これまでのUltralytics YOLOモデルと同様に、YOLO26は単一の統合モデルファミリー内で複数のコンピュータービジョンタスクをサポートしています。**Nano (n)、Small (s)、Medium (m)、Large (l)、Extra Large (x)**の5つのサイズが用意されており、デプロイの制約に応じて、チームがスピード、精度、モデルサイズのバランスを調整できるようになっています。
柔軟性に加え、YOLO26はパフォーマンスの基準を引き上げます。 YOLO11と比較して、YOLO26のnanoモデルは最大43%高速なCPU推論を実現しており、エッジやCPUベースのデプロイメントで利用可能な最も高速な高精度物体検出モデルの一つとなっています。
.webp)
図2:Ultralytics YOLO26は最先端のビジョンモデルです。
YOLO26でサポートされているコンピュータービジョンタスクについて詳しく見ていきましょう:
- 画像分類: YOLO26は画像全体を分析して特定のカテゴリに割り当てることができ、システムがシーン全体のコンテキストを理解するのに役立ちます。
- 物体検出: モデルは画像やビデオ内の複数の物体を見つけて特定できます。
- インスタンスセグメンテーション: YOLO26は個々の物体をピクセルレベルの詳細で輪郭を描くことができます。
- 姿勢推定: 人物やその他の物体のキーポイントを特定し、姿勢を推定するために使用できます。
- 指向性バウンディングボックス(OBB)検出: YOLO26はさまざまな角度で物体を検出でき、航空画像や衛星画像に特に役立ちます。
- 物体追跡: Ultralytics Pythonパッケージと組み合わせることで、YOLO26はビデオフレームやライブストリーム全体で物体を追跡するために使用できます。
すべてのタスクで、一貫したフレームワーク内での学習、検証、推論、エクスポートがサポートされています。
Link to this sectionUltralytics YOLO26を支える主要なイノベーション#
Ultralytics YOLO26は、推論速度、学習の安定性、デプロイの単純化を向上させるいくつかのコアイノベーションを導入しています。これらのイノベーションの概要は以下の通りです:
- Distribution Focal Loss (DFL) の削除: DFLモジュールを削除することで、バウンディングボックスの予測を簡素化し、ハードウェア互換性を向上させ、エッジや低電力デバイスへのエクスポートと実行を容易にしました。
- エンドツーエンドのNMSフリー推論: YOLO26は、最終的な予測を直接出力するネイティブなエンドツーエンドモデルとして設計されており、NMS(Non-Maximum Suppression)の必要性を排除し、推論レイテンシとデプロイの複雑さを低減しています。
- Progressive Loss Balancing + STAL: これらの改善された損失戦略により、学習が安定し、特に検出が困難な小さな物体の検出精度が向上しました。
- MuSGDオプティマイザ: YOLO26は、SGDとMuonに触発された最適化技術を融合した新しいハイブリッドオプティマイザを使用しており、より安定した学習を実現します。
- 最大43%高速なCPU推論: エッジコンピューティング向けに特別に最適化されたYOLO26は、CPU推論を最大43%高速化し、エッジデバイスでのリアルタイムパフォーマンスを実現します。
次に、YOLO26をより高速で効率的、かつデプロイしやすくするこれらの次世代機能を詳細に解説します。
Link to this sectionDistribution Focal Lossの削除による予測の簡素化#
以前のYOLOモデルでは、学習中にDistribution Focal Loss (DFL)を使用してバウンディングボックスの精度を向上させていました。効果的ではありましたが、DFLは複雑さを増し、エクスポートとデプロイを困難にする固定された回帰制限を課していました。これは特にエッジや低電力ハードウェアで問題となっていました。
YOLO26ではDFLを完全に削除しました。DFLを削除することで、以前のモデルにあった固定されたバウンディングボックス回帰制限が排除され、非常に大きな物体を検出する際の信頼性と精度が向上しました。
バウンディングボックスの予測プロセスを簡素化することで、YOLO26はエクスポートが容易になり、幅広いエッジおよび低電力デバイスでより確実に動作するようになりました。
Link to this sectionUltralytics YOLO26によるエンドツーエンドのNMSフリー推論#
従来の物体検出パイプラインは、重複する予測をフィルタリングする後処理ステップとしてNMSに依存していました。効果的ではありますが、NMSはレイテンシ、複雑さ、脆弱性を追加します。これは、モデルを複数のランタイムやハードウェアターゲットにデプロイする際に特に顕著です。
YOLO26では、ネイティブなエンドツーエンド推論モードが導入されました。モデルがNMSを個別の後処理ステップとして必要とせず、最終的な予測を直接出力します。重複する予測はネットワーク自体の中で処理されます。
NMSを排除することで、レイテンシが削減され、デプロイパイプラインが簡素化され、統合エラーのリスクが低減されます。これにより、YOLO26はリアルタイムおよびエッジデプロイに最適です。
Link to this sectionProgressive Loss Balancing + STALによる認識機能の強化#
学習に関連する重要な機能として、Progressive Loss Balancing (ProgLoss) と Small-Target-Aware Label Assignment (STAL) が導入されました。これらの改善された損失関数は、学習を安定させ、検出精度を向上させるのに役立ちます。
ProgLossは、モデルが学習中により一貫して学習できるように支援し、不安定さを減らして、よりスムーズに収束できるようにします。一方、STALは、視覚的な詳細が限られているために検出が難しいことが多い小さな物体について、モデルがどのように学習するかを改善することに重点を置いています。
ProgLossとSTALが組み合わさることで、より信頼性の高い検出が可能になり、小さな物体の認識において顕著な改善が見られます。これは、物体がしばしば小さく、遠く、あるいは部分的にしか見えない、IoT、ロボット工学、航空画像などのエッジアプリケーションにとって特に重要です。
Link to this sectionMuSGDオプティマイザによるより安定した学習#
YOLO26では、学習をより安定かつ効率的にするために設計されたMuSGDという新しいオプティマイザを採用しました。MuSGDは、伝統的なStochastic Gradient Descent (SGD)の強みと、大規模言語モデル (LLM) の学習で使用されるオプティマイザであるMuonに触発された技術を組み合わせたハイブリッドアプローチです。
SGDは、その単純さと強力な汎化性能により、コンピュータービジョンにおいて長年信頼される選択肢でした。同時に、近年のLLM学習の進歩は、注意深く適用すれば、新しい最適化手法が安定性と速度を向上させられることを示しています。MuSGDは、これらのアイデアのいくつかをコンピュータービジョンの分野に取り入れました。
Moonshot AIのKimi K2に触発されたMuSGDは、モデルが学習中によりスムーズに収束するのを助ける最適化戦略を組み込んでいます。これにより、YOLO26は、特に大規模または複雑な学習セットアップにおいて、学習の不安定さを減らしつつ、より速く強力なパフォーマンスに到達できるようになります。
MuSGDは、YOLO26がモデルサイズ全体でより予測可能な学習を行えるよう支援し、パフォーマンスの向上と学習の安定性の両方に寄与します。
Link to this sectionUltralytics YOLO26は最大43%高速なCPU推論を実現#
Vision AIがデータ生成元へと近づき続ける中、強力なエッジパフォーマンスがますます重要になっています。エッジコンピューティングに最適化されたYOLO26は、CPU推論を最大43%高速化し、GPUがないデバイスでもリアルタイムのパフォーマンスを保証します。この改善により、レイテンシ、効率、コスト制約が重要となるカメラ、ロボット、組み込みハードウェア上で、応答性が高く信頼性の高いビジョンシステムを直接実行できるようになります。
Link to this sectionUltralytics YOLO26でサポートされるコンピュータービジョンタスクの改善#
物体検出をより正確にするアーキテクチャの改善に加え、YOLO26には、コンピュータービジョンタスク全体のパフォーマンスを向上させるために設計されたタスク固有の最適化が含まれています。例えば、精度と信頼性を向上させるターゲットを絞った更新により、インスタンスセグメンテーション、姿勢推定、指向性バウンディングボックス検出が強化されています。
これらの最適化の概要は以下の通りです:
- インスタンスセグメンテーション: YOLO26は、セマンティックセグメンテーションの損失を使用して、学習中のモデルの学習方法を改善し、より正確で一貫したインスタンスマスクを導き出します。また、アップグレードされたprotoモジュールにより、複数のスケールの情報を使用できるようになったため、モデルは複雑なシーンでもサイズの異なる物体をより効果的に処理できます。
- 姿勢推定: キーポイント予測の不確実性をモデル化する手法であるResidual Log-Likelihood Estimation (RLE) を統合し、デコードプロセスを改善することで、YOLO26はより優れたリアルタイムパフォーマンスで正確なキーポイントを提供します。
- 指向性バウンディングボックス検出: YOLO26は、回転が曖昧になりがちな四角形の物体に対して、モデルが物体の回転をより正確に学習できるようにする特殊な角度損失を導入しました。また、最適化されたOBBデコーディングにより、回転境界付近での角度予測の急激な変化が抑えられ、より安定した一貫性のある向きの推定が可能になりました。

図3:インスタンスセグメンテーションにUltralytics YOLO26を使用。
Link to this sectionUltralytics YOLOE-26:YOLO26に基づくオープンボキャブラリーセグメンテーション#
Ultralyticsは、YOLO26のアーキテクチャと学習のイノベーションの上に構築された新しいオープンボキャブラリーセグメンテーションモデルファミリーであるYOLOE-26を発表します。
YOLOE-26は新しいタスクや機能ではなく、既存のセグメンテーションタスクを再利用しつつ、テキストプロンプト、視覚的プロンプト、およびプロンプトなし推論を可能にする専門的なモデルファミリーです。すべての標準YOLOサイズで利用可能なYOLOE-26は、以前のオープンボキャブラリーセグメンテーションモデルよりも強力な精度と、より信頼性の高い現実世界のパフォーマンスを実現します。
Link to this sectionUltralytics YOLO26はVision AIが実際に動作する環境のために設計されています#
ビジョン駆動型カメラからコンピュータービジョンで動作するロボット、そしてエッジの小さな処理チップまで、コンピュータービジョンとAIはリアルタイム推論のためにデバイス上で直接デプロイされています。Ultralytics YOLO26は、低レイテンシ、効率性、信頼性の高いパフォーマンスが不可欠なこれらの環境のために特別に構築されています。
実用面では、これはYOLO26が幅広いハードウェアに容易にデプロイできることを意味します。具体的には、Ultralytics Pythonパッケージとその幅広い統合を通じて、モデルをさまざまなプラットフォームやハードウェアアクセラレータに最適化されたフォーマットにエクスポートできます。
例えば、TensorRTへのエクスポートによりNVIDIA GPUでの高性能推論が可能になり、CoreMLはAppleデバイスでのネイティブデプロイをサポートし、OpenVINOはIntelハードウェアでのパフォーマンスを最適化します。YOLO26は、複数の専用エッジアクセラレータで実行するようにエクスポートすることもでき、専門的なエッジAIハードウェア上で高スループットかつエネルギー効率の高い推論を実現します。
これらはほんの一例であり、エッジ環境や本番環境全体でさらに多くの統合がサポートされています。この柔軟性により、単一のYOLO26モデルを多様なデプロイターゲットで実行できます。これにより、本番ワークフローが合理化され、Vision AIがエッジにもたらされます。
Link to this section業界全体でコンピュータービジョンのユースケースを再定義#
現実世界でのデプロイを想定して設計されたYOLO26は、さまざまな業界の幅広いコンピュータービジョンのユースケースで使用できます。適用可能な例をいくつか挙げます:
-
ロボット工学:YOLO26は、ナビゲーション、障害物検出、物体インタラクションなどのタスクに使用できます。これらの機能は、動的な環境における安全で効果的なロボット運用をサポートします。
-
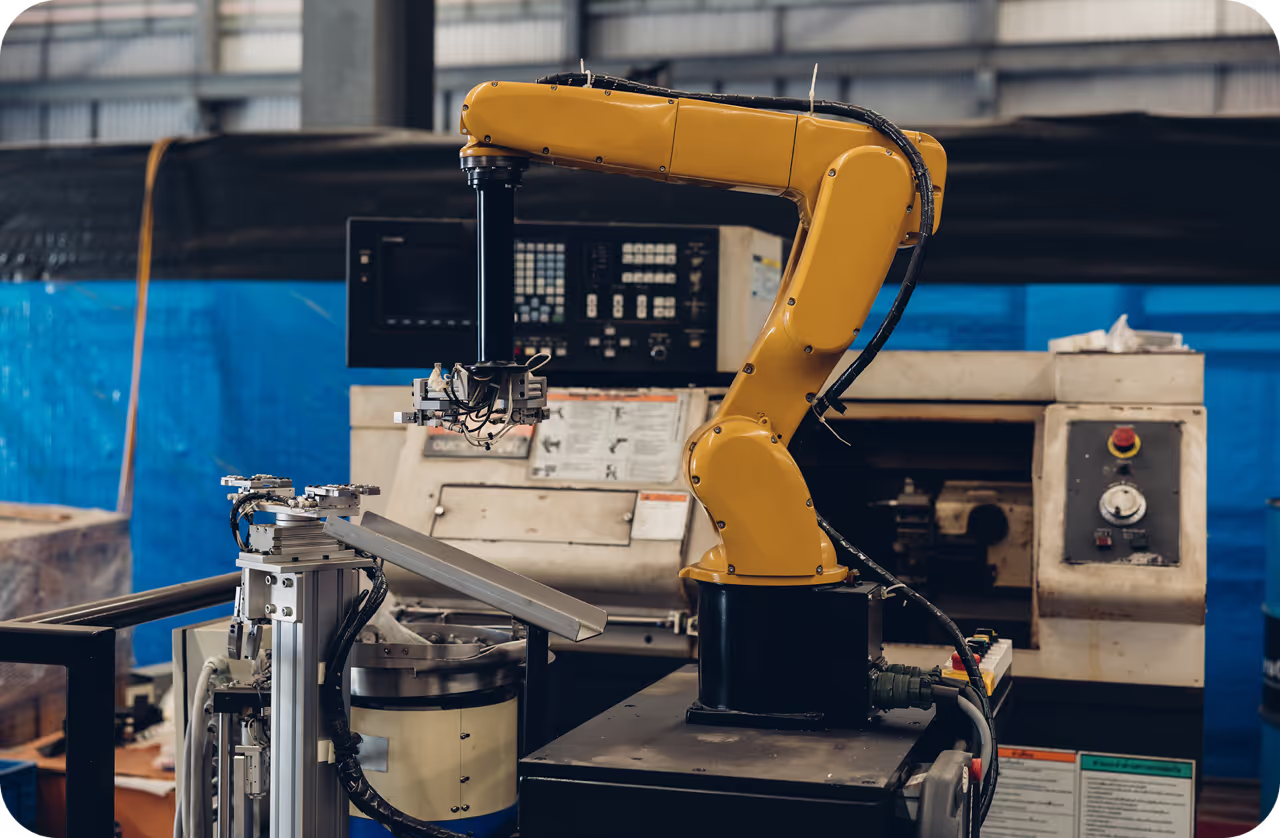
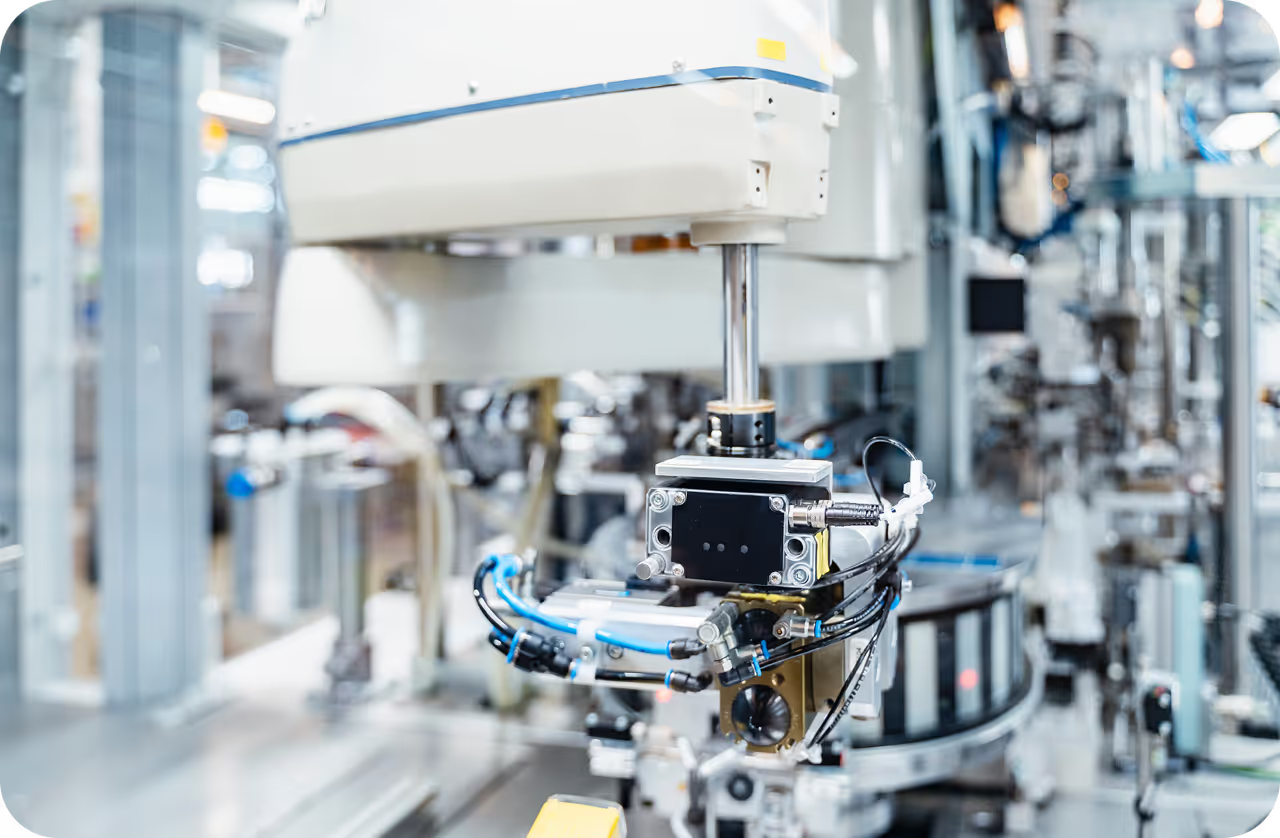
製造: 生産ラインにおいて、YOLO26は画像とビデオを分析して、欠陥、コンポーネントの不足、プロセス上の問題を特定できます。データをデバイス上で処理することで、検出を高速化し、クラウドシステムへの依存を軽減します。
-
航空およびドローンアプリケーション:ドローンにデプロイされた場合、YOLO26は飛行中に航空画像を処理して検査、マッピング、測量を行うことができます。これにより、遠隔地であってもリアルタイムでシーンを分析することが可能になります。
-
組み込みおよびIoTシステム:軽量な設計により、YOLO26は低電力の組み込みハードウェアで動作し、視覚データをローカルで処理できます。一般的なユースケースには、スマートカメラ、接続されたセンサー、自動監視デバイスなどがあります。
-
スマートシティ:都市環境全体において、YOLO26は交通監視カメラや公共スペースカメラからのビデオストリームを分析できます。これにより、交通監視、公共安全、エッジでのインフラ管理といったアプリケーションが可能になります。

図4:YOLO26はさまざまなコンピュータービジョンアプリケーションに使用できます。
Link to this sectionUltralytics YOLO26を使い始める#
Ultralytics YOLO26は、Vision AIをどのように構築しデプロイするかに応じて、2つの補完的なワークフローで使用できます。
オプション1: Ultralyticsプラットフォームを通じてUltralytics YOLO26を使用する(推奨)
Ultralyticsプラットフォームは、本番環境でYOLO26モデルを学習、デプロイ、監視するための一元的な手段を提供します。データセット、実験、デプロイメントを1か所にまとめ、特にエッジや本番環境へのデプロイを行うチームにとって、Vision AIワークフローの大規模な管理を容易にします。
プラットフォームを通じて、ユーザーは以下のことができます:
- YOLO26モデルへのアクセス
- カスタムデータセットでの学習と微調整
- エッジおよび本番デプロイ用のモデルエクスポート
- 単一のワークフローでの実験およびデプロイ済みモデルの監視
👉 UltralyticsプラットフォームでYOLO26を探索:platform.ultralytics.com/ultralytics/yolo26
オプション2: オープンソースワークフローを通じてUltralytics YOLO26を使用する
YOLO26は、Ultralyticsのオープンソースエコシステムを通じて完全にアクセス可能であり、学習、推論、エクスポートのための既存のPythonベースのワークフローで使用できます。
開発者はUltralyticsパッケージをインストールし、事前学習済みのYOLO26モデルを読み込み、ONNX、TensorRT、CoreML、またはOpenVINOといった使い慣れたツールやフォーマットを使用してデプロイできます。
pip install ultralyticsfrom ultralytics import YOLO
# Load a COCO-pretrained YOLO26n model
model = YOLO("yolo26n.pt")
# Run inference with the YOLO26n model on the 'bus.jpg' image
results = model("path/to/bus.jpg")実用的な制御やカスタムパイプラインを好むユーザーのために、完全なドキュメントとガイドがUltralyticsのドキュメントで提供されています。
Link to this sectionUltralytics YOLO26:コンピュータービジョンの次なるステップに向けて構築#
Ultralytics YOLO26は、モデルが高速かつ効率的で、実際のハードウェアに簡単にデプロイできなければならない、明日のVision AIソリューションのニーズを満たすように設計されています。パフォーマンスの向上、デプロイの簡素化、モデルの機能拡張により、YOLO26は幅広い現実世界のアプリケーションに自然に適合します。YOLO26は、Vision AIがどのように構築され、デプロイされ、スケーリングされるかの新しい基準を確立します。コミュニティがこれを使用して、現実世界のコンピュータービジョンシステムを提供してくれることを楽しみにしています。
私たちの拡大するコミュニティに参加し、GitHubリポジトリで実践的なAIリソースを探索してください。今すぐビジョンAIを構築したい場合は、ライセンスオプションをご確認ください。農業におけるAIがどのように農業を変革しているのか、またロボティクスにおけるビジョンAIがどのように未来を形作っているのかについては、ソリューションページをご覧ください。