Robotics
AIとコンピュータビジョンが現代のロボティクスをどのように支えているかを解説します。リアルタイム認識、自律性、およびインテリジェントな自動化のためにUltralytics YOLO26をデプロイする方法を学びましょう。
ロボティクスは、工学、コンピュータサイエンス、技術の融合領域に位置する学際的な分野であり、ロボットとして知られるプログラム可能な機械の設計、構築、および運用を専門としています。従来のロボティクスは反復的で事前プログラムされた機械的タスクに重点を置いていましたが、現代の状況は人工知能 (AI)と機械学習 (ML)の統合によって根本的に変革されました。この相乗効果により、機械はセンサーを通じて周囲の環境を認識し、自律的な決定を下し、対話から学習することが可能となり、硬直的な自動化ツールから、複雑で構造化されていない現実世界のシナリオをナビゲートできるインテリジェントなエージェントへと進化しています。
Link to this sectionロボティクスにおける認識と自律性#
For a robot to operate effectively outside a controlled cage, it must possess "perception"—the ability to interpret sensory data. Computer Vision (CV) acts as the primary sensory modality, processing visual inputs from cameras, LiDAR, and depth sensors. Advanced deep learning (DL) models allow robots to identify obstacles, read signs, or inspect products. Technologies like Ultralytics YOLO26 are critical in this domain, offering the high-speed object detection required for real-time responsiveness on embedded hardware like the NVIDIA Jetson platform.
ロボットの自律性を推進する主要なML機能には以下が含まれます:
- 自己位置推定と地図作成: SLAM (Simultaneous Localization and Mapping)などのアルゴリズムにより、ロボットは未知の環境の地図を作成しながら、その環境内での自身の位置を追跡できます。
- 操作: 正確なポーズ推定により、ロボットアームは物体の向きを判断でき、不規則なアイテムの把持やビンピッキングなどの複雑なタスクを実行しやすくなります。
- 意思決定: 強化学習を通じて、エージェントは環境と対話し、報酬信号を受け取ることで最適な戦略を学習します。これはGoogle DeepMindのような研究グループによって先駆的に進められてきた手法です。
Link to this section実社会での応用#
インテリジェントロボティクスの応用は、効率と安全性を高めることで多様な産業を再形成しています。
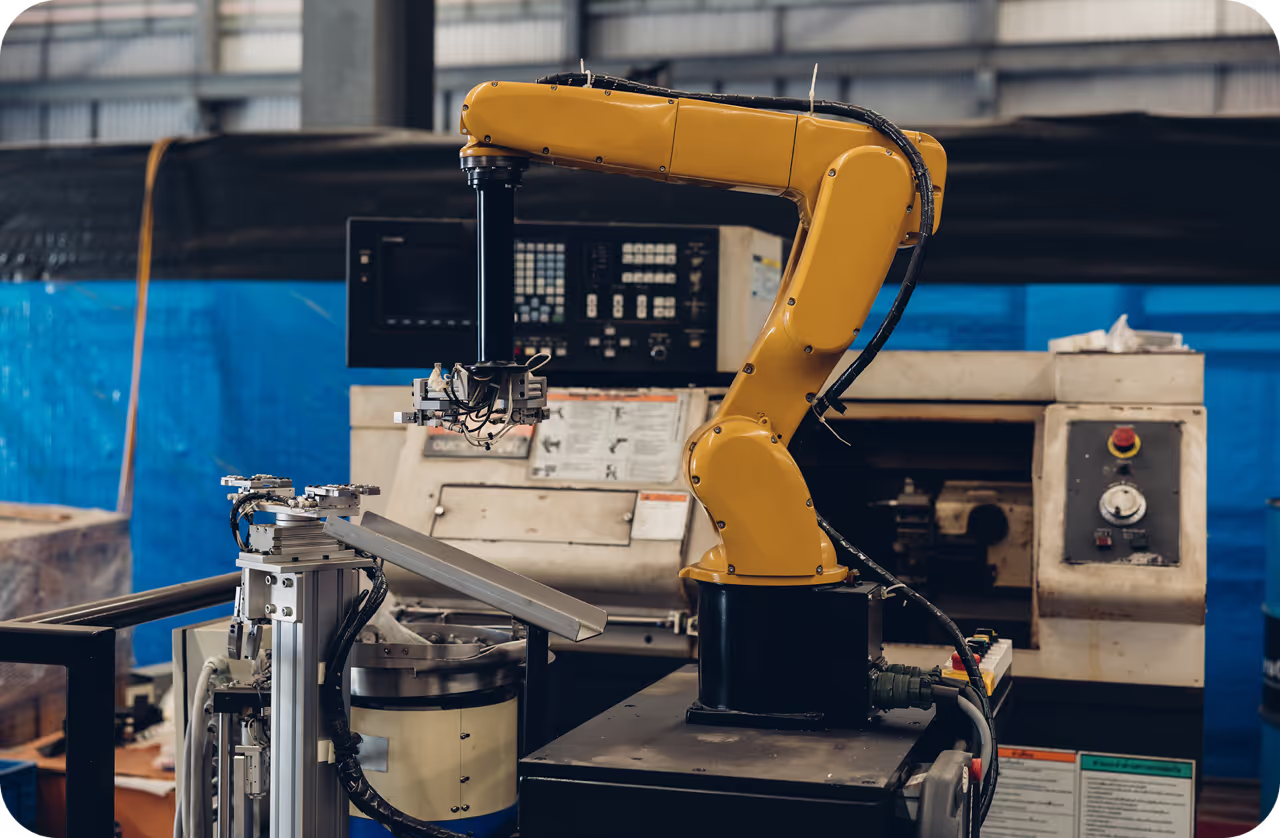
Link to this section産業オートメーションと製造#
インダストリー4.0のパラダイムにおいて、「協働ロボット (コボット)」は人間と並んで作業します。製造におけるAIを採用することにより、これらのシステムは画像セグメンテーションを使用して、人間の検査官が見逃してしまうような組立ライン上の微細な欠陥を特定します。国際ロボット連盟 (IFR)は、世界中でこれらのスマート自動化システムの密度が著しく上昇していると報告しています。
Link to this section物流における自律走行搬送ロボット(AMR)#
Warehouses utilize AMRs to transport goods without fixed infrastructure. Unlike older Automated Guided Vehicles (AGVs) that followed magnetic tapes, AMRs use autonomous navigation powered by Edge AI to dynamically reroute around obstacles. This capability is central to modern AI in logistics, optimizing supply chain throughput.
Link to this sectionロボティクスとロボティック・プロセス・オートメーション (RPA) の比較#
ビジネスの文脈では用語が重複することが多いため、物理的なロボティクスとロボティック・プロセス・オートメーション (RPA)を区別することが不可欠です。
- ロボティクスは、現実世界と相互作用する物理的なハードウェア(例:建設現場を点検するBoston DynamicsのSpotロボット)を扱います。
- RPAは、デジタルで反復的なビジネスプロセスを自動化するソフトウェアボット(例:Webフォームからのデータスクレイピングや請求書処理)を指します。
どちらも自動化の向上を目指していますが、ロボティクスは物理的な物体(アトム)を操作し、RPAはデジタル情報(ビット)を操作します。
Link to this sectionロボット制御のためのビジョンの実装#
ロボットにビジョンモデルをデプロイする際は、安全性を確保するために低い推論レイテンシ向けに最適化する必要があることがよくあります。Robot Operating System (ROS)のようなミドルウェアは、ビジョンアルゴリズムとハードウェアアクチュエータ間の橋渡しとして一般的に使用されます。デプロイの前に、開発者はUltralytics Platformを使用して特殊なデータセットにアノテーションを付け、クラウドでのトレーニングライフサイクルを管理することがよくあります。
以下の例は、Pythonスクリプトがカメラフィード内の人物を検出するためにビジョンモデルをどのように使用できるかを示しています。これはモバイルロボットにとって一般的な安全要件です:
from ultralytics import YOLO
# Load a lightweight YOLO26 model optimized for edge devices
model = YOLO("yolo26n.pt")
# Process a live camera feed (source=0) with a generator for efficiency
results = model.predict(source=0, stream=True)
for result in results:
# Check if a person (class index 0) is detected with high confidence
if result.boxes.conf.numel() > 0 and 0 in result.boxes.cls:
print("Person detected! Triggering stop command.")
# robot.stop() # Hypothetical hardware interface callLink to this section今後の展望#
この分野は、特殊な単機能の機械ではなく、マルチタスクが可能な汎用ロボットへと向かう傾向にあります。基盤モデルの革新により、ロボットが自然言語の指示を理解できるようになり、技術者以外のユーザーにも利用しやすくなっています。さらに、農業におけるAIの進歩により、精密な除草、播種、収穫が可能な完全自律型の農業フリートが実現しており、化学物質の使用量と人件費を削減しています。MIT Computer Science and Artificial Intelligence Laboratoryのような機関による研究は、ソフトロボティクスと人間とロボットの相互作用の限界を押し広げ続けています。