ヒューマンインザループのアノテーションが重要である理由の理解
人間によるアノテーションデータがコンピュータビジョンモデルの精度をどのように向上させるか、そして信頼性の高いVision AIシステムにおいてなぜ人間の専門知識が依然として不可欠なのかをご覧ください。

20年前、誰かが「家事を手伝ってくれるロボットを導入したい」と言ったら、非現実的だと思われたでしょう。しかし、現在はAIブームの真っ只中にあり、ロボットが類似のシナリオで試験的に導入されています。
この進歩を牽引するAIの主要分野がコンピュータビジョンであり、これはマシンが画像やビデオを理解する能力を与えるものです。言い換えれば、Ultralytics YOLO11や、今後登場予定のUltralytics YOLO26のようなコンピュータビジョンモデルは、視覚データとアノテーションで構成されたデータセットでトレーニングできます。
これらのアノテーションは、モデルが視覚データを理解する助けとなります。例えば、物体検出のデータセットでは、BBoxを使用して興味のある物体の周りに矩形を描きます。これにより、シーンが込み入っていたり物体が部分的に隠れていたりしても、モデルは新しい画像内でその物体を検出し、位置を特定できるようになります。
その他のコンピュータビジョンタスクは、異なる種類のアノテーションに依存します。セグメンテーションのデータセットはピクセルレベルで物体の正確な輪郭にラベルを付け、キーポイントのデータセットは人の関節などの特定のランドマークをマーキングします。
しかし、これらすべての形式において、重要な要素はラベルの品質と一貫性です。モデルは直接トレーニングに使用されたデータから学習するため、ラベルに不整合があったり間違っていたりすると、モデルは多くの場合、その間違いを予測にも引き継いでしまいます。
自動化が進んだ現在でも、医療用画像のようなリスクの高い分野では、人間によるアノテーションデータセットが依然として不可欠です。腫瘍境界の不正確さや異常の見落としといった小さなラベル付けエラーは、モデルに誤ったパターンを教え込み、後々、信頼性の低い予測につながる可能性があります。人間の専門家は、こうしたアプリケーションが求める正確なグラウンドトゥルース(正解データ)と判断力を提供します。

図1:人間によるアノテーションデータセットの必要性。画像提供:著者。
本記事では、AIが進化し続ける中でもなぜ人間によるアノテーションデータが不可欠なのかを詳しく見ていきます。
Link to this section画像およびビデオアノテーションの必要性#
コンピュータビジョンモデルは、多くの例を見ることで私たち人間に近い形で学習します。違いは、人間が事前にラベルを付けた大量の画像データセットとビデオを通してトレーニングを行う点です。それらのラベルはグラウンドトゥルースとして機能し、「これは歩行者である」「ここが腫瘍の境界である」「あの物体は車である」といった事柄をモデルに教えます。
現実世界の視覚データは、決してクリーンでも一貫しているわけでもありません。照明が変化すれば同じ物体でも見え方が異なります。人や車両が重なったり、部分的に隠れたりすることもあります。背景が雑然としていて気が散ることもあります。データセットがこうした状況下でも注意深く一貫したラベルを含んでいる場合、モデルは管理された環境外で遭遇する事象に対して、はるかに優れた準備ができるようになります。
データアノテーションは、単にボックスを描いたり輪郭をなぞったりする以上の作業です。ガイドラインを適用し、何がその物体と見なされるか、境界はどこにあるべきか、不明確な場合にどう対応すべきかといった実用的な判断を行う作業が含まれます。そのような人間による判断こそが、データを正確かつ実用的なものに保つのです。
結局のところ、コンピュータビジョンシステムのパフォーマンスは、学習するラベル付きデータの質に依存します。スキャン画像から癌を発見したり、自動運転車のために道路上の危険を検知したりするような、インパクトの大きいアプリケーションにおいては、熟練者による正確なラベルが、精度と安全性の面で真の違いを生みます。
Link to this sectionデータアノテーションにおける自動化の台頭#
コンピュータビジョンがスケールし、データセットが拡大するにつれて、アノテーションを高速化する手段として自動化が一般的になっています。すべてを手作業でラベル付けする代わりに、チームはAIモデルを使用して一次ラベルを作成しています。
その後、人間が結果をレビューし、間違いを修正し、モデルが自信を持ってラベル付けできないケースを処理します。このアプローチにより、品質を高く維持しながらアノテーションを加速させることが可能です。
自動化がデータアノテーションを助ける一般的な方法をいくつか紹介します。
- 自動セグメンテーション: モデルは物体の輪郭やピクセルレベルのマスクを自動的に提案できるため、アノテーターが行う必要がある手動トレースの量を減らすことができます。
- オプティカルフロー追跡: ビデオの場合、追跡手法を用いてフレーム間で移動物体を追いかけ、ラベルを引き継ぐことで、時間の経過とともにアノテーションの一貫性を維持するのに役立ちます。
- フレーム補間: ツールは、モーションや追跡の手がかりを使用して2つのラベル付きフレーム間のフレームにラベルを補完できるため、アノテーターはすべてのフレームにラベルを付ける必要がありません。
- アクティブラーニング: トレーニングパイプラインは、モデルが不確実である、または異常だと判断した例を特定して、優先的に人間に送ることで、パフォーマンス向上に最も寄与するデータに手動の労力を集中させることができます。
Link to this section人間によるデータアノテーションが依然として不可欠な理由#
自動化によってラベル付けを加速させることはできますが、AIモデルが正確かつ信頼性を維持するためには、依然として人間の判断が必要です。
データアノテーションにおいて人間の専門知識が影響を与える主要な分野をいくつか挙げます。
- コンテキストの理解: 実際の画像やビデオは多くの場合複雑です。影、反射、モーションブラー、重なり合う物体は、自動ツールを混乱させる可能性があります。人間のアノテーターは実際に何が起きているかを解釈できるため、ラベルがより正確になります。
- ラベルの一貫性の維持: データセットが拡大すると、自動ラベルがずれたり、バッチ間でバラつきが生じたりすることがあります。人間はラベルを監査、修正、調整して、データセットを最初から最後まで一貫した状態に保つことができます。
- 偏見や害の軽減: 人間は、機密性の高いコンテンツ、文化的なニュアンス、偏見を招く可能性のあるパターンを見つけるのが得意です。人間の監視はデータセットを公平にし、意図しない害を防ぐのに役立ちます。
- 主題の専門知識の適用: 医療上の異常や工業上の欠陥の特定など、特定のタスクにはドメイン知識が必要です。専門家は正確なラベルを提供し、曖昧なケースを解決することで、モデルが正しい詳細を学習できるようにします。
Link to this sectionヒューマン・イン・ザ・ループ・アノテーションの概要#
Roboflowのようなアノテーションツールやプラットフォームは、Segment Anything Model 3やSAM3のような基盤モデルを使用して、自動化を統合しラベル付けを高速化しています。SAM3はMeta AIが開発した、プロンプトベースのセグメンテーション基盤モデルです。
クリック、BBox、短いテキストフレーズといった単純なプロンプトから画像やビデオ内の物体を検出し、セグメント化し、追跡できます。これにより、新しいカテゴリごとにタスク固有のトレーニングを必要とせず、該当する物体のセグメンテーションマスクを生成します。
こうした最先端のアプローチを用いても、最終的なアノテーションのレビューと確定には、人間の専門家が依然として必要です。自動化ツールがドラフトを作成し、人間がそれを検証、修正、改良するワークフローは、ヒューマン・イン・ザ・ループのアノテーションとして知られています。これにより、アノテーションを高速に保ちながら、信頼性の高いモデルをトレーニングするために必要な、正確かつ一貫した最終ラベルを確保できます。
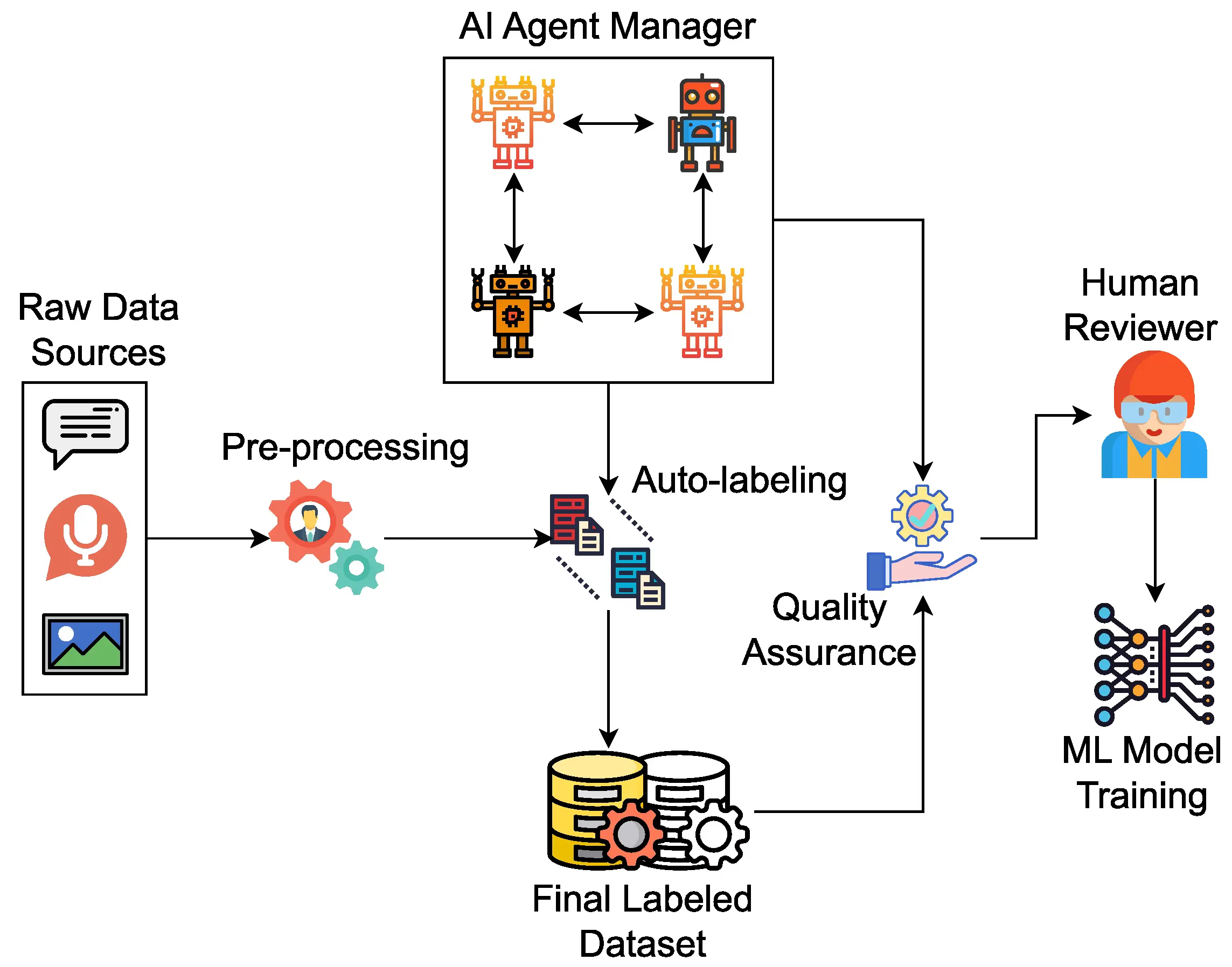
図2:ヒューマン・イン・ザ・ループ・アノテーションの様子。(出典)
Link to this sectionアノテーションの自動化が機能する場合とそうでない場合#
自動アノテーションは、管理された環境からのデータに最適です。工場、倉庫、小売店の通路で収集された画像は通常、照明が安定しており物体の視認性が明確であるため、自動ツールで正確にラベル付けでき、少ない手作業でチームのスケールアップを支援します。
より制御されていない環境からのデータはより複雑です。屋外の映像は時間帯や天候によって変化し、道路や家屋のシーンは雑然としていてモーションブラーが含まれ、物体が互いに遮り合ったり重なり合ったりすることがよくあります。小さな物体、細かい輪郭、あるいは希少な状況は、さらにエラーの余地を広げます。クリーンな屋内データで優れたパフォーマンスを発揮するモデルでも、現実世界の散らかった映像では苦戦する可能性があります。
そのため、人間の入力が依然として重要です。モデルが不確実な場合や、トリッキーなコンテキストを解釈し、最終的なデータセットに取り込まれる前に間違いを修正する役割を人間が担います。ヒューマン・イン・ザ・ループのアノテーションは、自動化を現実世界の状況に基づかせ、デプロイ後もモデルの信頼性を維持する助けとなります。
Link to this sectionヒューマン・イン・ザ・ループ・アノテーションが違いを生む場所とは?#
自動化が機能する場所とそうでない場所がわかったところで、ヒューマン・イン・ザ・ループのアノテーションが重要な役割を果たすアプリケーションをいくつか探っていきましょう。
Link to this section製造における欠陥検知#
工場のコンベアベルトで、1分間に何百もの部品がカメラの下を通過する場面を想像してください。ほとんどの欠陥は一目でわかりますが、稀に、変な角度や光の反射の下でヘアラインクラック(微細なひび)が見えることがあります。自動システムはこれを見逃したり、無害な表面のテクスチャとしてラベル付けしたりするかもしれませんが、人間のレビューアなら欠陥を見つけ、アノテーションを修正し、モデルにその違いを学習させることができます。
これこそが、工業検査におけるヒューマン・イン・ザ・ループ・アノテーションの役割です。自動化は一般的な欠陥タイプを事前ラベル付けして大量の画像を高速処理できますが、人間が結果を検証し、境界を締め直し、トレーニングであまり頻繁に現れない希少な失敗を処理する必要があります。
Link to this section自動運転車とスマートトランスポーテーション#
同様に、自動運転車はコンピュータビジョンを使用して歩行者の発見、標識の認識、交通状況のナビゲートを行いますが、現実の道路は予測不可能です。例えば、夜間に駐車中の車の背後から飛び出してくる歩行者は、部分的に隠れており、照明の眩しさの下では見えにくいことがあります。

図3:コンピュータビジョンを使用して交通を分析する例。(出典)
人間のアノテーターは、トレーニング中にこうした稀で安全に関わるエッジケースにラベルを付け、モデルが通常の状況だけでなく、最も重要な瞬間に正しい反応を学習できるようにします。このヒューマン・イン・ザ・ループのステップは、自動化だけでは捉えにくい低頻度のイベントをシステムに教えるために不可欠です。
Link to this section人間がアノテーションしたデータセットの今後の道筋#
テクノロジーの進歩に伴い、ヒューマン・イン・ザ・ループのアノテーションは、より協調的なものになりつつあります。興味深いことに、画像とテキストの両方から学習するビジョン言語モデル(VLM)が、現在ではラベルの一次案を作成し、単純なプロンプトから修正を提案するために使用されています。
つまり、何にラベルを付けるかを決めるためにすべての画像を手作業でスキャンする代わりに、アノテーターはVLMに対して「すべての歩行者、車、信号機にラベルを付けて」や「この部品上のすべての欠陥をセグメント化して」といったフレーズで指示を出し、レビュー対象となるアノテーションのドラフトセットを入手できます。
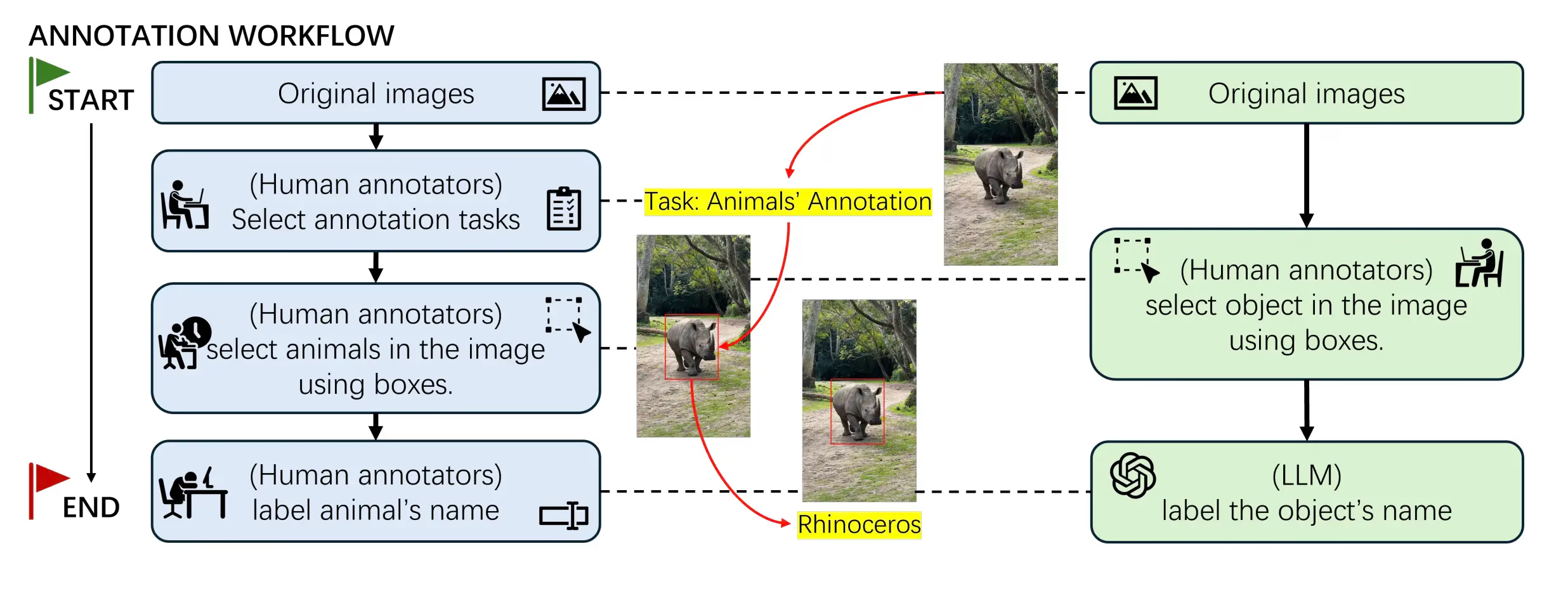
図4:大規模マルチモーダルモデルは人間のアノテーターと協働可能(出典)
モデルが多くの単純なケースを先に対応できるため、人間は結果のレビュー、トリッキーな例の修正、データセットの一貫性維持に集中でき、アノテーション時間が短縮されます。大規模マルチモーダルモデルは、最も不確実なサンプルへとアノテーターを誘導し始めてもおり、人間の努力をよりターゲットを絞ったものにすることで、データセット全体の品質を向上させています。
Link to this section重要なポイント#
コンピュータビジョンはマシンが視覚情報を解釈し反応する助けとなりますが、ヒューマン・イン・ザ・ループでの人間の専門知識と組み合わせるのが最も効果的です。人間がアノテーションしたデータは、モデルを現実世界の状況に即したものに保ち、そのパフォーマンスの信頼性を向上させます。自動化と人間の判断を並行して機能させることで、チームはインパクトのあるビジョンシステムを構築できます。
活発なコミュニティに参加し、物流におけるAIやロボット工学におけるビジョンAIといったイノベーションを探索してください。詳細については、GitHubリポジトリにアクセスしてください。今すぐコンピュータビジョンを始めるには、ライセンスオプションをご確認ください。






