Entendiendo la detección de bordes en el procesamiento de imágenes
Detección de bordes en procesamiento de imágenes. Aprende Sobel, Canny y otros algoritmos de detección de bordes para detectar bordes con precisión y lograr un reconocimiento robusto.
Como seres humanos, reconocemos de forma natural los bordes de los objetos, seguimos sus curvas y observamos las texturas de sus superficies al mirar una imagen. Para un ordenador, sin embargo, la comprensión comienza a nivel de los píxeles individuales.
Un píxel, la unidad más pequeña de una imagen digital, almacena color y brillo en un único punto. Al realizar un seguimiento de los cambios en estos valores de píxel a través de una imagen, un ordenador puede detectar patrones que revelan detalles clave.
En particular, el procesamiento de imágenes utiliza datos de píxeles para enfatizar características esenciales y eliminar distracciones. Una técnica común de procesamiento de imágenes es la detección de bordes, la cual identifica puntos donde el brillo o el color cambian bruscamente para perfilar objetos, marcar límites y añadir estructura.
Esto permite a los ordenadores separar formas, medir dimensiones e interpretar cómo se conectan las partes de una escena. La detección de bordes es a menudo el primer paso en el análisis de imágenes avanzado.
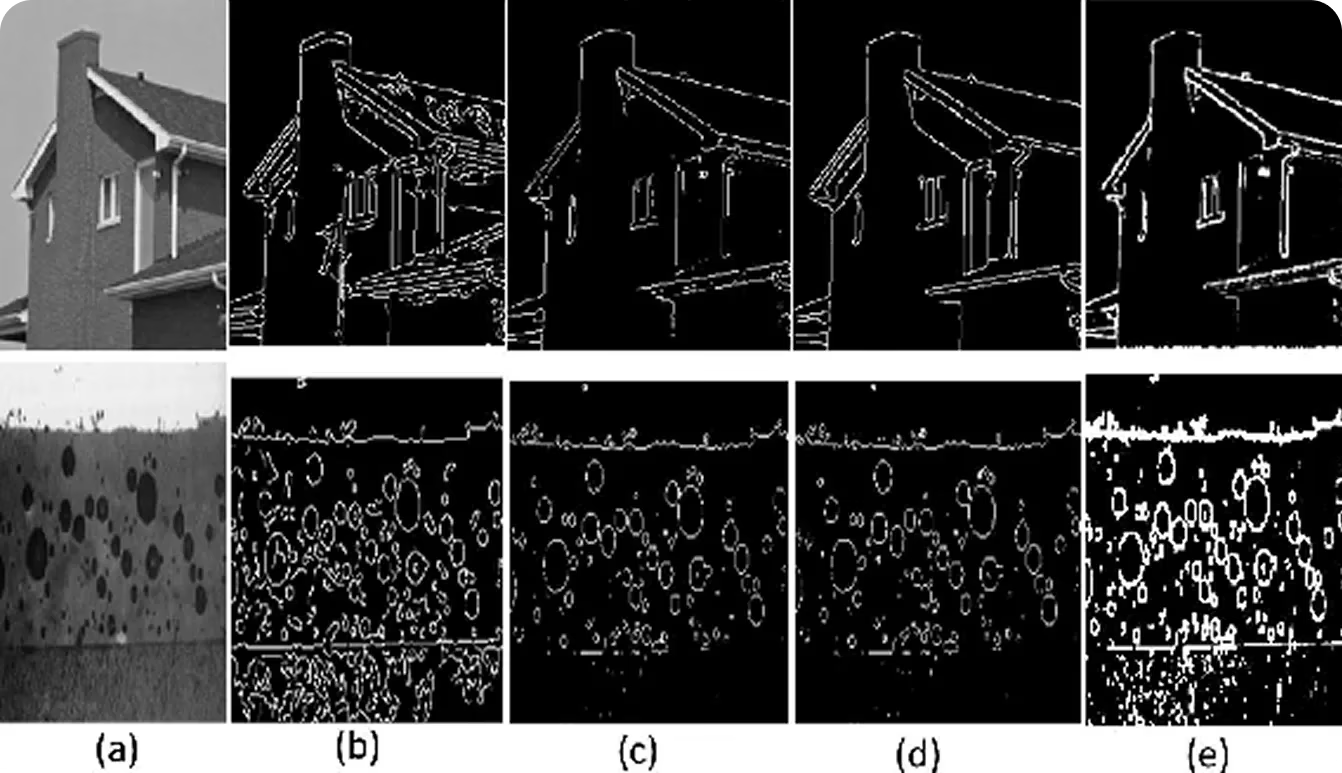
Fig 1. Ejemplo que muestra la imagen original junto a las salidas de diferentes métodos de detección de bordes. (Fuente)
En este artículo, echaremos un vistazo a qué es la detección de bordes, cómo funciona y sus aplicaciones en el mundo real. ¡Empecemos!
Link to this sectionConceptos de detección de bordes#
La detección de bordes se centra en buscar lugares en una imagen donde el brillo o el color cambien notablemente de un punto a otro. Si el cambio es pequeño, el área parece suave. Si el cambio es brusco, a menudo marca el límite entre dos regiones diferentes.
Aquí tienes algunas de las razones por las que ocurren estos cambios en los píxeles:
- Discontinuidades en la normal de la superficie: Cuando dos superficies se encuentran en ángulo, como la esquina de una pared o el borde de una caja, este cambio brusco en la orientación produce un límite claro en la imagen.
- Discontinuidades de profundidad: Aparecen donde los objetos están a diferentes distancias de la cámara, produciendo una separación visible que ayuda al sistema a distinguirlos.
- Cambios de color o textura de la superficie: Esto ocurre cuando un área tiene un color o textura diferente al área adyacente, creando una separación visible.
- Cambios de iluminación: Surgen de cambios en la iluminación, incluyendo sombras o reflejos en las superficies, creando separaciones visibles incluso cuando las superficies en sí son lisas o continuas.
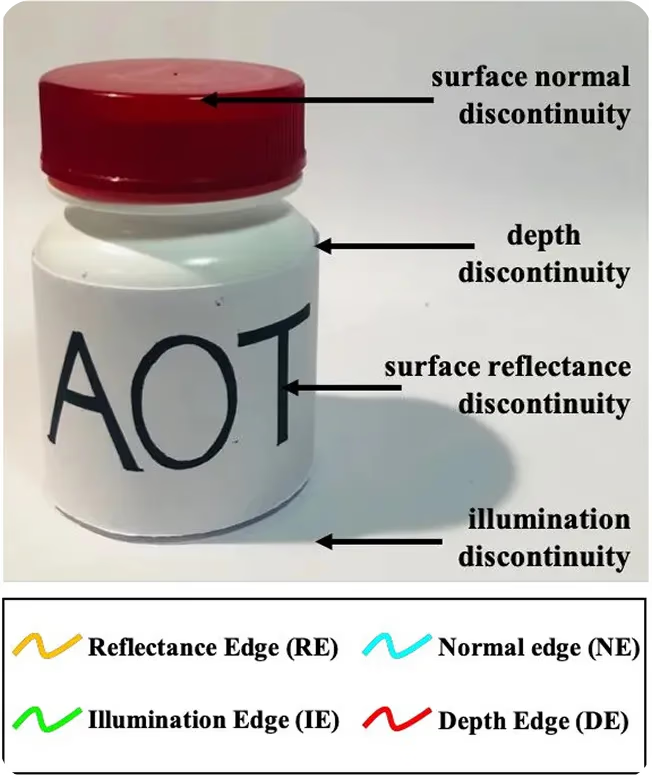
Fig 2. Diferentes tipos de discontinuidades de borde en imágenes. (Fuente)
Link to this section¿Cómo funciona el reconocimiento de detección de bordes?#
La detección de bordes suele comenzar convirtiendo una imagen en color a una imagen en escala de grises, de modo que cada punto solo muestre brillo. Esto facilita que el algoritmo se centre en las diferencias entre luces y sombras en lugar del color.
A continuación, filtros especiales pueden escanear la imagen para encontrar lugares donde el brillo cambie repentinamente. Estos filtros calculan qué tan pronunciado es el cambio de brillo, lo que se denomina gradiente. Un gradiente más alto es causado por una mayor diferencia entre puntos cercanos, lo que a menudo indica un borde.
El algoritmo luego continúa refinando la imagen, eliminando pequeños detalles y conservando solo las líneas y formas más importantes. El resultado es un contorno claro y una imagen de salida que puede utilizarse para un análisis posterior.
Link to this sectionEvolución de la detección de bordes y el procesamiento de imágenes#
Antes de profundizar en la detección de bordes, hablemos sobre cómo se desarrolló con el paso del tiempo.
El procesamiento de imágenes comenzó con métodos simples basados en reglas, como umbralización y filtrado, para limpiar y mejorar fotografías. En la era analógica, esto significaba trabajar con fotografías o películas mediante filtros ópticos, lupas o tratamientos químicos para resaltar detalles.
Técnicas como el ajuste de contraste, la reducción de ruido, el ajuste de la intensidad de la imagen y la detección básica de bordes ayudaron a hacer las imágenes de entrada más claras y a resaltar formas y texturas. En las décadas de 1960 y 70, el cambio de lo analógico a lo digital abrió el camino para el análisis moderno en áreas como la astronomía, la imagen médica y la monitorización por satélite.
En las décadas de 1980 y 90, los ordenadores más rápidos hicieron posible abordar tareas más complejas, como la extracción de características, la detección de formas y el reconocimiento básico de objetos. Algoritmos como el operador de Sobel y Canny ofrecieron una detección de bordes más precisa, mientras que el reconocimiento de patrones encontró aplicaciones en todo, desde la automatización industrial hasta la lectura de texto impreso mediante reconocimiento óptico de caracteres.
Link to this sectionLa detección de bordes y la visión artificial en el siglo XXI#
Hoy en día, los avances constantes en la tecnología han llevado al desarrollo de la visión artificial. La IA visual, o visión artificial, es una rama de la IA que se centra en enseñar a las máquinas a interpretar y comprender información visual.
Mientras que el procesamiento de imágenes tradicional, como la doble umbralización (que hace que las imágenes sean más claras al mantener bordes fuertes y eliminar los débiles) y la detección de bordes, seguía reglas fijas y solo podía manejar tareas específicas, la visión artificial utiliza modelos basados en datos que pueden aprender de ejemplos y adaptarse a nuevas situaciones.
Hoy en día, los sistemas de imagen van mucho más allá de simplemente mejorar imágenes o detectar bordes. Pueden reconocer objetos, realizar un seguimiento del movimiento y comprender el contexto de toda una escena.
Una de las técnicas clave que hace esto posible es la convolución. Una operación de convolución es un proceso donde filtros pequeños (también llamados kernels) escanean una imagen para encontrar patrones importantes como bordes, esquinas y texturas. Estos patrones se convierten en los bloques de construcción que los modelos de visión artificial utilizan para reconocer y entender objetos.
Por ejemplo, los modelos de visión artificial como Ultralytics YOLO11 utilizan estas características basadas en convolución para realizar tareas avanzadas como la segmentación de instancias. Esto está estrechamente relacionado con la detección de bordes porque la segmentación de instancias requiere perfilar con precisión los límites de cada objeto en una imagen.
Mientras que la detección de bordes se centra en encontrar cambios de intensidad en los píxeles de borde para marcar los bordes de los objetos, la segmentación de instancias se basa en esa idea para detectar bordes, clasificar y separar cada objeto en su propia región.

Fig 3. Una mirada al uso de YOLO11 y la segmentación de instancias. (Fuente)
Link to this sectionAlgoritmos y enfoques de detección de bordes#
Incluso con el crecimiento de la visión artificial, el procesamiento de imágenes sigue siendo una parte importante de muchas aplicaciones. Esto se debe a que la visión artificial a menudo se basa en pasos básicos de preprocesamiento de imágenes.
Antes de detectar objetos o comprender una escena, los sistemas suelen limpiar la imagen, reducir el ruido y encontrar bordes para que los detalles clave resalten. Estos pasos hacen que los modelos avanzados sean más precisos y eficientes.
A continuación, exploremos algunos de los algoritmos de procesamiento de imágenes más comunes utilizados para detectar bordes y cómo funcionan.
Link to this sectionDetección de bordes de Sobel#
La detección de bordes de Sobel es un método clave utilizado para encontrar los contornos de los objetos en una imagen. En lugar de analizar cada detalle a la vez, se centra en áreas donde el brillo cambia bruscamente de un píxel al píxel vecino.
Estos cambios repentinos suelen marcar el punto donde termina un objeto y comienza otro, o donde un objeto se encuentra con el fondo. Al aislar estos bordes, Sobel transforma una imagen compleja en un contorno más limpio que es más fácil de procesar para otros sistemas para tareas como realizar el seguimiento de movimiento, detectar formas o reconocer objetos.
Puedes pensar en la detección de bordes de Sobel como un detector de gradiente que mide cómo cambia la intensidad a través de una imagen. En su núcleo, esto funciona mediante una operación de convolución: deslizar pequeñas matrices, llamadas kernels, a través de la imagen y calcular sumas ponderadas de los valores de píxeles vecinos.
Estos kernels están diseñados para enfatizar cambios en el brillo a lo largo de las direcciones horizontal y vertical. A diferencia de los modelos de aprendizaje profundo, donde los kernels se aprenden a partir de datos, Sobel utiliza kernels fijos para resaltar bordes de manera eficiente sin requerir entrenamiento.
Aquí tienes un análisis más detallado de cómo funciona el método de detección de bordes de Sobel:
- Uso de dos filtros 3×3: Este método utiliza dos pequeñas rejillas de 3×3, llamadas filtros. Piénsalas como plantillas que se deslizan sobre la imagen en las direcciones horizontal (eje x) y vertical (eje y). Una rejilla está diseñada para encontrar bordes horizontales y la otra para bordes verticales.
- Cálculo del gradiente: Cada filtro encuentra la rapidez con la que cambia el brillo y la dirección del gradiente. Un cambio grande significa un posible borde.
- Combinación de resultados: Los resultados horizontales y verticales se combinan para determinar la fuerza general del borde y la dirección en cada píxel.
- Detección de bordes: Los píxeles con una magnitud de gradiente alta se marcan como bordes fuertes.
- Perfilado de límites: Estos bordes ayudan a definir las formas de los objetos y separar diferentes regiones en la imagen.
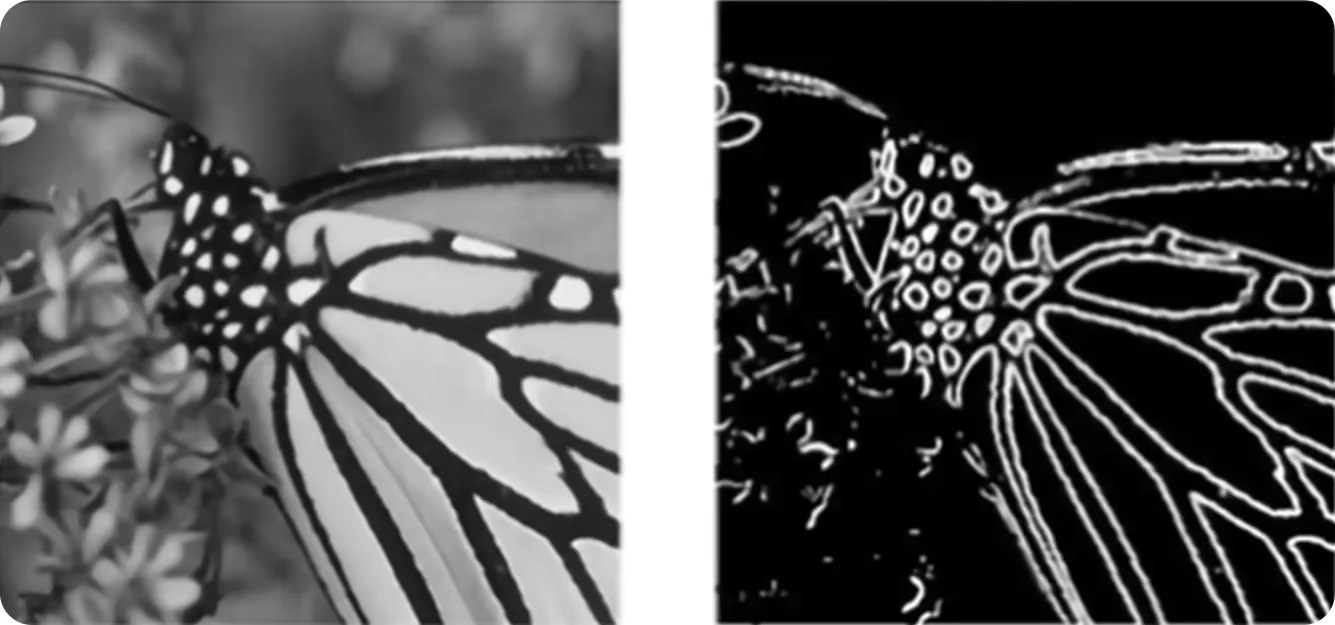
Fig 4. La detección de bordes de Sobel puede resaltar los contornos principales de una imagen de entrada y producir un mapa de bordes. (Fuente)
Link to this sectionDetección de bordes de Canny#
La detección de bordes de Canny es otro método popular para encontrar bordes en una imagen. Es conocido por producir contornos limpios y precisos. A diferencia de las técnicas básicas de detección de bordes, sigue una serie de pasos cuidadosamente diseñados para filtrar el ruido, definir los límites y centrarse en los bordes más importantes.
Aquí tienes un resumen rápido de cómo funciona un detector de bordes Canny:
- Suavizado de la imagen: La imagen se desenfoca primero con un filtro Gaussiano, una técnica de suavizado que reduce el ruido y los pequeños detalles que podrían confundirse con bordes.
- Detección de cambios de brillo: El algoritmo escanea luego buscando cambios bruscos en el brillo, utilizando cálculos de gradiente para medir la fuerza y la dirección de esos cambios.
- Adelgazamiento de los bordes: Solo se mantienen los puntos más fuertes a lo largo de cada línea detectada, mientras que se eliminan los puntos más débiles, resultando en bordes nítidos y limpios.
- Clasificación de bordes: Cada píxel se etiqueta como fuerte, débil o no borde, basándose en valores de umbral de cambio de brillo.
- Limpieza final: Se mantienen los bordes débiles conectados a los fuertes; todos los demás se descartan, dejando solo límites claros y conectados.
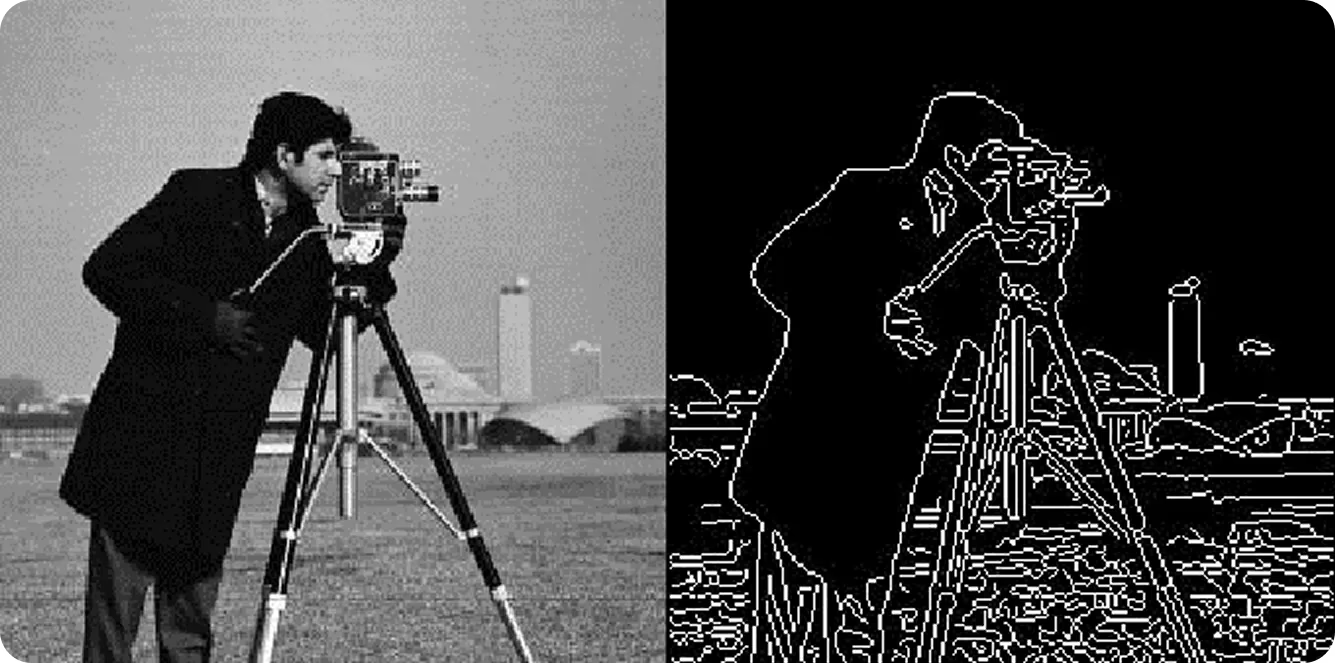
Fig 5. Imagen original y su respectiva imagen de salida después de usar el detector de bordes Canny. (Fuente)
Debido a que ofrece resultados precisos mientras filtra el ruido, la detección de bordes de Canny es ampliamente utilizada en áreas donde la precisión es importante. Por ejemplo, se utiliza en industrias como la imagen médica, la cartografía por satélite, el escaneo de documentos y la visión robótica.
Link to this sectionDetección de bordes basada en gradiente vs. basada en Gaussiana#
Hasta ahora, los dos ejemplos de detección de bordes que analizamos son Sobel y Canny. Aunque ambos buscan encontrar bordes, abordan el problema de manera diferente.
Los métodos basados en gradiente (como Sobel, Prewitt y Scharr) detectan bordes buscando cambios bruscos en el brillo, conocidos como gradiente. Escanean la imagen y marcan lugares donde este cambio es más fuerte. Estos métodos son simples, rápidos y funcionan bien cuando las imágenes son claras. Sin embargo, son sensibles al ruido: pequeñas variaciones en el brillo pueden confundirse con bordes.
Los métodos basados en Gaussiana (como Canny o Laplaciano de Gaussiana) añaden un paso extra para manejar este problema: desenfocar la imagen primero. Este suavizado, a menudo realizado con un filtro Gaussiano, reduce pequeñas variaciones que podrían crear bordes falsos. Después del suavizado, estos métodos siguen buscando cambios bruscos de brillo, pero los resultados son más limpios y precisos para imágenes con ruido o de baja calidad.
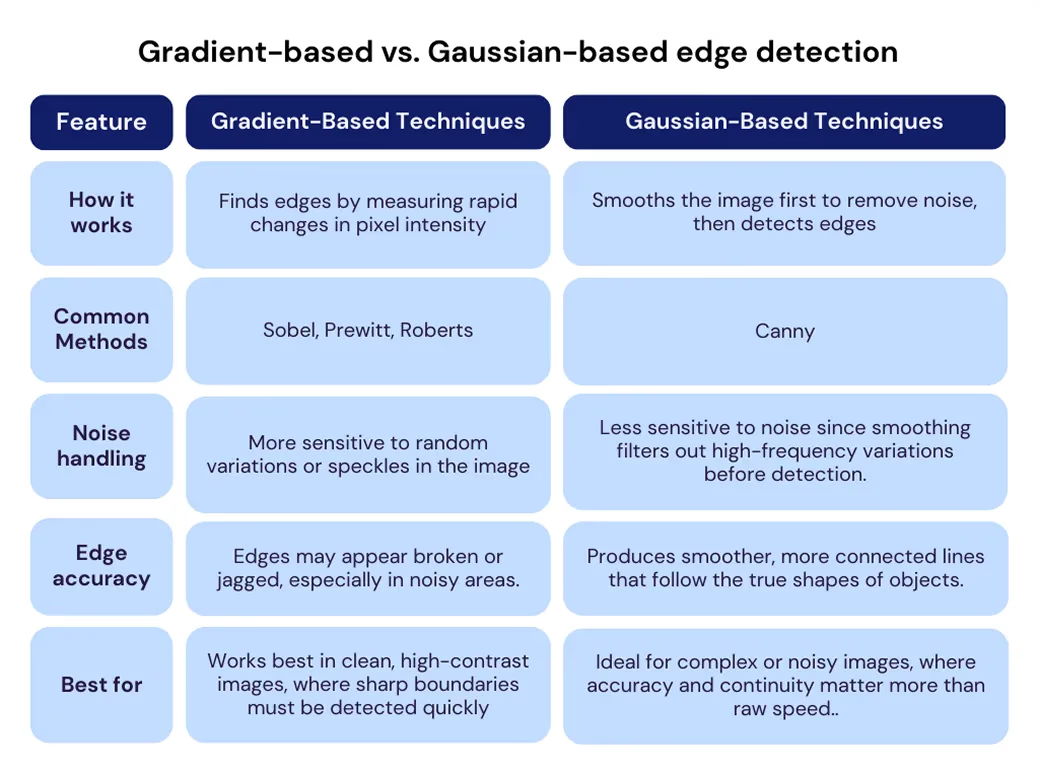
Fig 6. Detección de bordes basada en gradiente vs. basada en Gaussiana. Imagen del autor.
Link to this sectionAplicaciones de la detección de bordes en el mundo real#
Con una mejor comprensión de cómo funciona la detección de bordes, exploremos cómo se aplica en situaciones del mundo real.
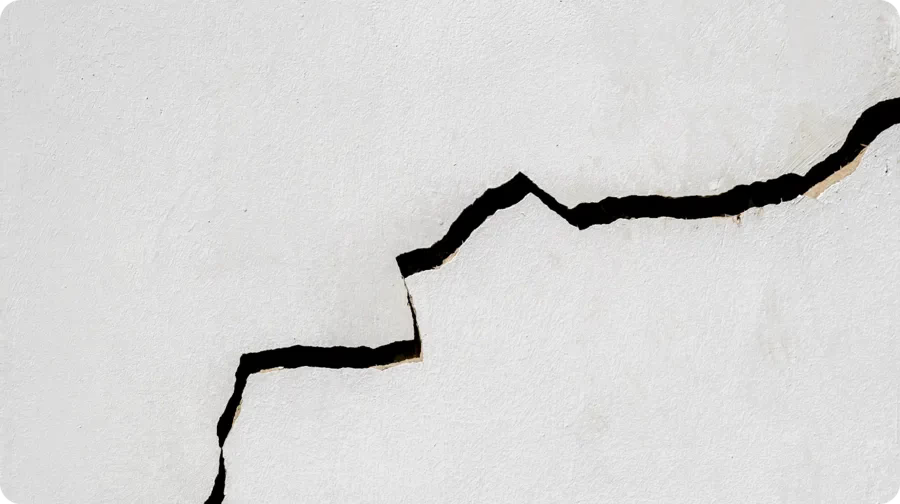
Link to this sectionUso de la detección de bordes para identificar grietas#
Inspeccionar grandes estructuras de hormigón, como puentes y edificios de gran altura, es a menudo una tarea desafiante y peligrosa. Estas estructuras pueden abarcar largas distancias o alcanzar elevaciones altas, lo que hace que las inspecciones tradicionales sean lentas, costosas y arriesgadas. Estas inspecciones también requieren habitualmente andamios, acceso mediante cuerdas, mediciones manuales detalladas o fotografía.
Un enfoque interesante se exploró en 2019, cuando los investigadores probaron un método más seguro y rápido utilizando drones equipados con cámaras de alta resolución para capturar imágenes detalladas de superficies de hormigón. Estas imágenes fueron luego procesadas con diversas técnicas de detección de bordes para identificar grietas automáticamente.
El estudio mostró que este método redujo significativamente la necesidad de acceso humano directo a áreas peligrosas y aceleró las inspecciones. Sin embargo, su precisión seguía dependiendo de factores como las condiciones de iluminación, la claridad de la imagen y la estabilidad en el funcionamiento del dron. En algunos casos, todavía se requería la revisión humana para eliminar falsos positivos.
Link to this sectionAplicación de la detección de bordes en la imagen médica#
Las radiografías y las resonancias magnéticas a menudo contienen perturbaciones visuales conocidas como ruido, lo que puede hacer que los detalles finos sean más difíciles de ver. Esto se convierte en un desafío para los médicos cuando intentan detectar los bordes de un tumor, trazar el contorno de un órgano o monitorizar cambios sutiles a lo largo del tiempo.
Un estudio de imagen médica reciente probó qué tan bien los métodos comunes de detección de bordes, como Sobel, Canny, Prewitt y Laplaciano, manejan imágenes con ruido. Los investigadores añadieron diferentes tipos y niveles de ruido a las imágenes y comprobaron con qué precisión cada método podía perfilar características importantes.
Canny generalmente producía los bordes más limpios, incluso cuando el ruido era intenso, pero no fue el mejor en cada caso. Algunos métodos funcionaron mejor con ciertos patrones de ruido, por lo que no existe una solución perfecta única.
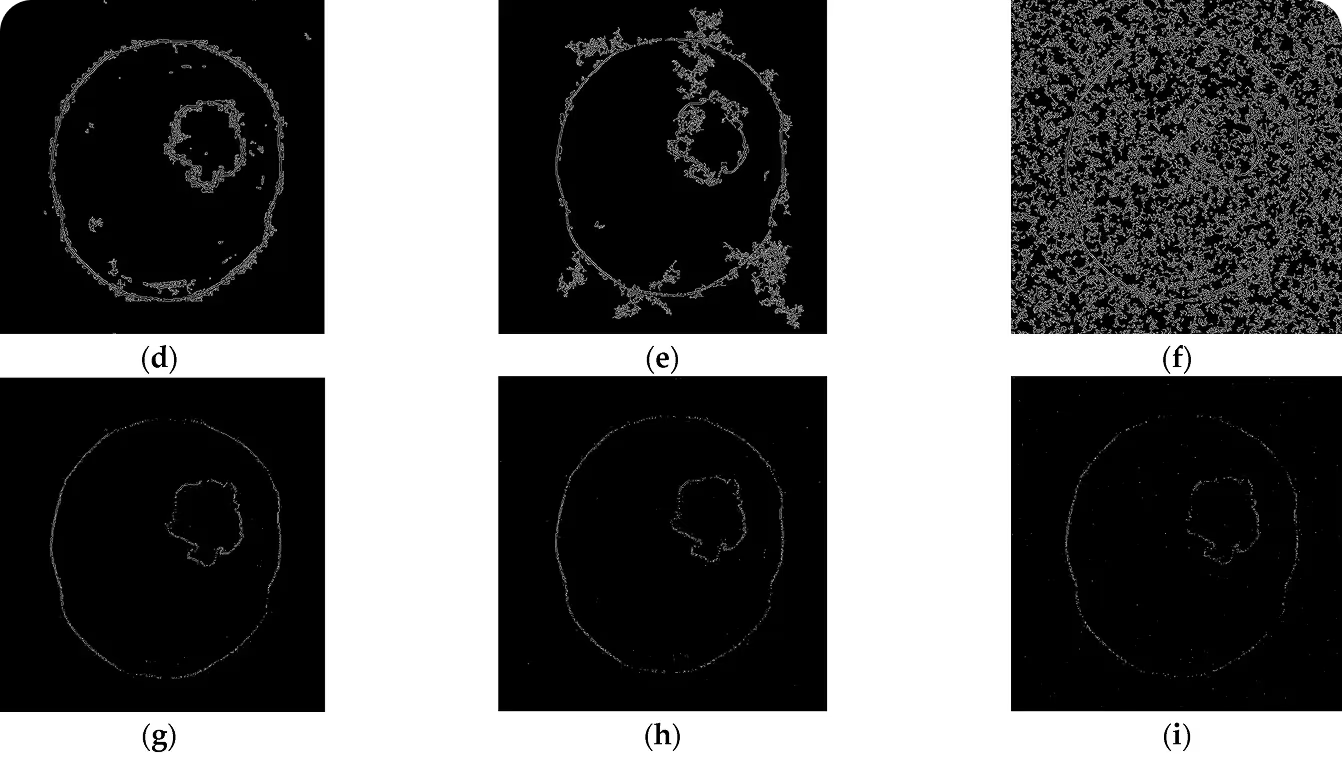
Fig 7. Canny (d–f) proporciona bordes más claros que Sobel (g–i) a medida que el ruido aumenta. (Fuente)
Esto destaca por qué las tecnologías como la visión artificial son tan importantes. Al combinar algoritmos avanzados y modelos de IA visual, dichas soluciones pueden ir más allá de la detección básica de bordes para ofrecer resultados más precisos y fiables incluso en condiciones difíciles.
Link to this sectionPros de la detección de bordes#
Estos son algunos de los beneficios de usar la detección de bordes y el procesamiento de imágenes:
- Mejor compresión de datos: La detección de bordes permite representar las imágenes utilizando solo características clave, reduciendo el tamaño del archivo mientras se mantiene la información esencial. Esto hace que el almacenamiento y la transmisión sean más eficientes.
- Localización de objetos más precisa: Al identificar con precisión los límites de los objetos, la detección de bordes mejora la capacidad de los sistemas para localizar y realizar el seguimiento de objetos, beneficiando aplicaciones como la IA en robótica de visión y vehículos autónomos.
- Detección de características multiescala: Las técnicas de detección de bordes pueden analizar imágenes a diferentes escalas, capturando tanto pequeños detalles como formas más grandes. Esta flexibilidad es útil en tareas variadas, desde el análisis de texturas hasta la comprensión de escenas.
Link to this sectionLimitaciones del uso del procesamiento de imágenes para la detección de bordes#
Aunque hay muchos beneficios en la detección de bordes en el procesamiento de imágenes, también conlleva algunos desafíos. Aquí tienes algunas de las limitaciones clave a considerar:
- Problemas con texturas complejas: En imágenes con patrones intrincados o repetitivos, la detección de bordes a menudo produce muchos bordes falsos o irrelevantes, lo que complica el análisis posterior y reduce la fiabilidad.
- Sensible a la iluminación: Las variaciones en el brillo, las sombras y los reflejos pueden hacer que los detectores de bordes malinterpreten los cambios en la iluminación como límites de objetos, lo que lleva a resultados inconsistentes.
- Sin identificación de objetos: Si bien los bordes resaltan dónde comienzan y terminan los objetos, no muestran qué son los objetos. Se necesita procesamiento adicional para asignar significado o etiquetas a los bordes detectados.
Link to this sectionCuándo se puede utilizar la visión artificial para la detección de bordes#
La detección de bordes está inspirada en cómo nuestros ojos y cerebro trabajan juntos para dar sentido al mundo. Cuando se trata de la visión humana, las neuronas especializadas en la corteza visual son altamente sensibles a bordes, líneas y límites.
Estas señales visuales nos ayudan a determinar rápidamente dónde termina un objeto y comienza otro. Es por eso que incluso un dibujo lineal simple puede ser reconocible al instante: nuestro cerebro depende en gran medida de los bordes para identificar formas y objetos.
La visión artificial tiene como objetivo imitar esta capacidad pero va un paso más allá. Modelos como Ultralytics YOLO11 van más allá del resaltado básico de bordes y la mejora de imágenes. Pueden detectar objetos, perfilarlos con precisión y realizar el seguimiento de movimiento en tiempo real. Este nivel más profundo de comprensión los hace esenciales en escenarios donde la detección de bordes por sí sola no es suficiente.
Link to this sectionUso de Ultralytics YOLO11 para detectar bordes con mayor precisión#
Aquí tienes algunas tareas de visión artificial clave soportadas por YOLO11 que se basan en la detección de bordes y van más allá:
- Detección de objetos: Identifica y localiza múltiples objetos en una imagen o vídeo dibujando cajas delimitadoras alrededor de cada uno, proporcionando una visión clara de lo que está presente y dónde está posicionado cada objeto.
- Segmentación de instancias: Esto implica desglosar los objetos hasta el nivel de píxel, produciendo contornos limpios y precisos incluso cuando los objetos se superponen o tienen formas irregulares.
- Estimación de pose: El objetivo aquí es determinar la posición, orientación o postura de un objeto o persona, lo que ayuda a monitorizar el movimiento o detectar cambios estructurales a lo largo del tiempo.
- Seguimiento de objetos: Esta tarea sigue a un objeto a medida que se desplaza por los fotogramas de vídeo, asegurando una identificación coherente para una observación precisa a largo plazo.
- Clasificación de imágenes: Asigna etiquetas a objetos o imágenes completas basándose en sus características visuales, facilitando la organización e interpretación de grandes conjuntos de datos.
Link to this sectionDetección de bordes en infraestructuras con visión artificial#
Un buen ejemplo de visión artificial mejorando una aplicación que tradicionalmente dependía de la detección de bordes es la detección de grietas en infraestructuras y activos industriales. Los modelos de visión artificial como YOLO11 pueden entrenarse para identificar con precisión grietas en carreteras, puentes y tuberías. La misma técnica puede aplicarse también en el mantenimiento de aeronaves, inspecciones de edificios y control de calidad en la fabricación, ayudando a acelerar las inspecciones y mejorar la seguridad.
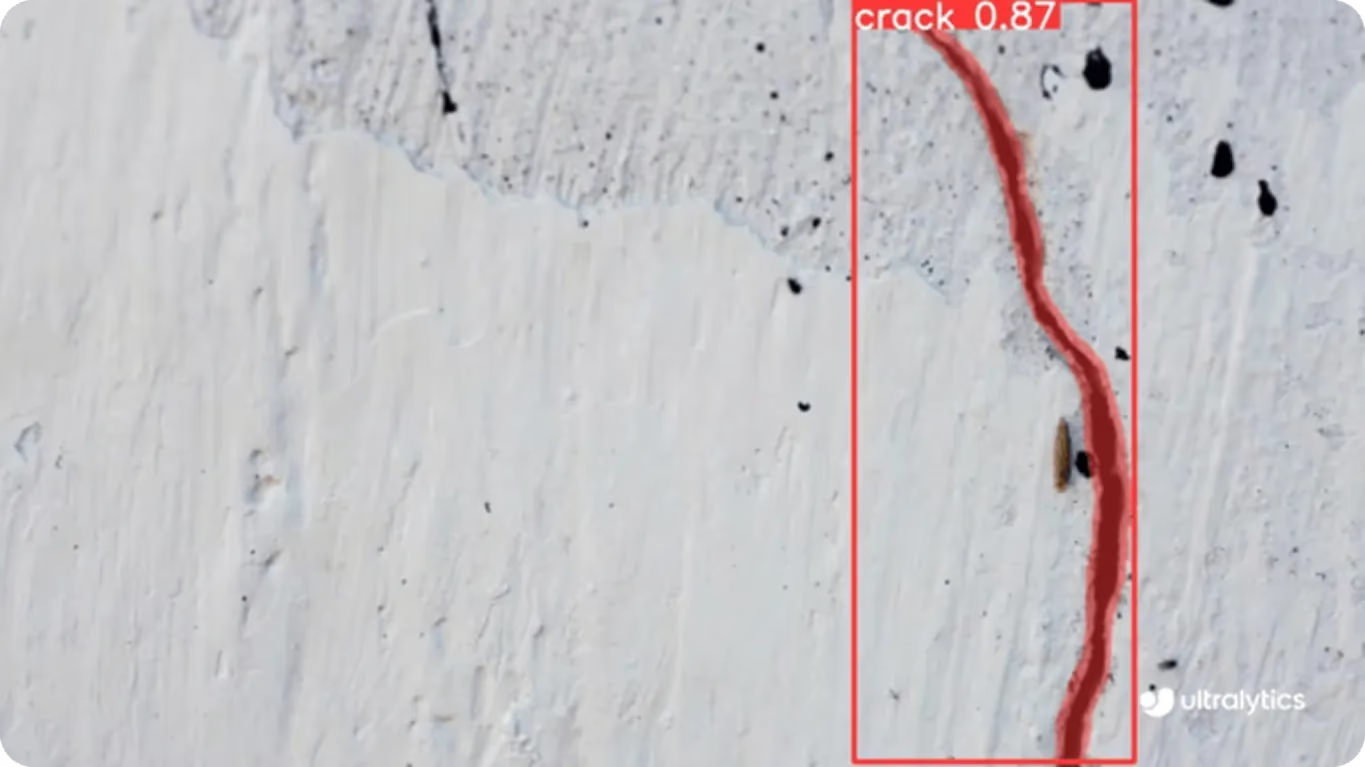
Fig 8. Un ejemplo del uso de YOLO11 para la segmentación de grietas. (Fuente)
Link to this sectionConclusiones clave#
La detección de bordes ha avanzado mucho, desde métodos iniciales sencillos hasta técnicas avanzadas capaces de detectar incluso límites sutiles en imágenes complejas. Ayuda a resaltar detalles importantes, destacar áreas clave y preparar imágenes para un análisis más profundo, convirtiéndose en una parte fundamental del procesamiento de imágenes.
En visión artificial, la detección de bordes desempeña un papel importante en la definición de formas, la separación de objetos y la extracción de información útil. Se utiliza en muchas áreas, como la imagen médica, las inspecciones industriales, la conducción autónoma y la seguridad, para ofrecer una comprensión visual precisa y fiable.
Únete a nuestra comunidad y explora nuestro repositorio de GitHub para descubrir más sobre IA. Si buscas iniciar tu propio proyecto de visión por IA, echa un vistazo a nuestras opciones de licencia. Descubre más sobre aplicaciones como IA en la asistencia sanitaria y visión por IA en el comercio minorista visitando nuestras páginas de soluciones.






