ナビゲーションアプリケーションにおけるコンピュータビジョンの探求
ナビゲーションソリューションにおけるコンピュータビジョンが、よりスマートで安全な旅行体験のために、どのようにリアルタイムマッピング、オブジェクト認識、拡張現実を強化しているかをご覧ください。

今日、目的地を入力して指示通りに進むというナビゲーションは、まるで意識せずにできるほど当たり前のことになりました。ほんの数秒で完了する日常的なこの便利さは、長年にわたる技術進歩の賜物です。紙の地図やコンパスから、現実世界をリアルタイムで理解し応答できるインテリジェントシステムへと、ナビゲーションは大きな進化を遂げてきました。
この変化を支える技術の一つがコンピュータビジョンです。これは、機械が人間と同じように視覚情報を解釈できるようにする人工知能(AI)の分野です。最先端のナビゲーションツールでは、衛星、ドライブレコーダー、街中のセンサーからのリアルタイム画像を活用して、地図の精度向上、道路状況の監視、複雑な環境でのユーザー誘導が行われています。
本記事では、コンピュータビジョンがどのようにナビゲーションを強化しているかを探ります。具体的には、GPS地図の改善、リアルタイムの交通情報の提供、拡張現実(AR)ナビゲーションや自律走行車などの技術支援といった側面から解説します。
Link to this section没入型3Dマッピングを備えたAIナビゲーションシステム#
Google Mapsなどのツールを使って日常的に移動することは、市内の移動であれ近くのカフェ探しであれ、非常に一般的になっています。AI技術の普及に伴い、2023年にGoogle Mapsで導入されたImmersive Viewのように、ユーザーが3D環境で旅先の様子を事前に確認できる高度な機能が増えています。これはAI、フォトグラメトリ、コンピュータビジョンの組み合わせによって実現されています。
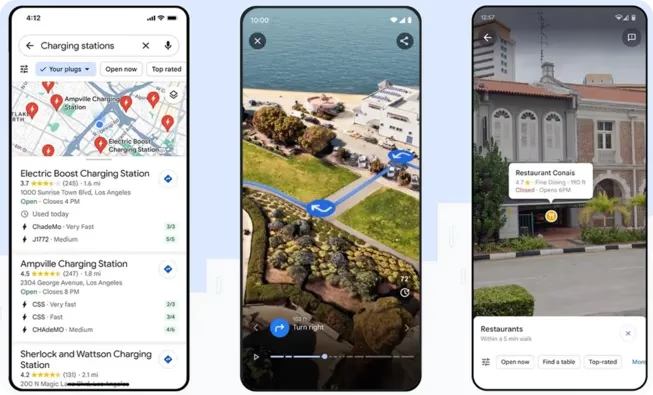
Fig 1. Google MapsのImmersive View。
その基盤となっているのは、さまざまな専用機器で撮影された数十億枚もの高解像度画像です。これには、街中を走行する360度カメラ搭載のストリートビューカーや、車両が入れないハイキングコースや狭い路地などの撮影に使われる、カメラを装着したバックパック型の「Trekker」デバイスなどが含まれます。
これらの画像は、フォトグラメトリ(異なる角度から撮影された2D写真を組み合わせて、道路、建物、地形の正確な3Dモデルを作成する手法)を用いて地図データと整合されます。
その後、コンピュータビジョンを用いてこれらのモデルを分析します。物体検出や画像セグメンテーションを活用し、道路標識、歩道、横断歩道、建物の入り口といった重要な特徴を特定してラベル付けを行います。

Fig 2. Immersive Viewによる路上物体のセグメンテーション。
ラベル付けされたデータは、地域ごとに異なる視覚的手がかりを認識するAIシステムの学習に使用されます。例えば、システムは米国で一般的な黄色またはオレンジ色のひし形の「SLOW(徐行)」標識と、日本で一般的な赤と白の三角形の標識を容易に区別できます。このような理解力により、ナビゲーション体験はより正確で地域文化に適したものとなります。
最後に、Immersive Viewはリアルタイムのナビゲーション経路を3D環境にオーバーレイ表示し、目的地までの経路を直感的かつスムーズに示します。
Link to this sectionナビゲーションソリューションにおける拡張現実#
Google Mapsの指示に従って歩いているつもりが、どの方向を向いているのか分からず、その場で回転してしまった経験は誰にでもあるでしょう。まさにその混乱を解消するために開発されたのが、現実世界のカメラ映像にデジタル情報を重ね合わせる拡張現実(AR)ナビゲーションです。これは、都市の通りや巨大な屋内施設などで目的地を探す方法を劇的に変えています。
通常の地図は、特にGPS信号が弱い場所や精度が低い場所では理解しづらいことがあります。ARナビゲーションは、現実世界のカメラ映像上にデジタルの指示、矢印、ラベルを直接表示することでこれを解決します。ユーザーは周囲の道路や建物と一致したガイダンスを見ることができるため、進むべき方向を把握しやすくなります。
Link to this sectionナビゲーションにおけるARの活用事例#
ARナビゲーションは、デバイスのカメラを通じて環境を理解するためにコンピュータビジョンモデルに依存しています。これには、建物の輪郭や道路標識などの特徴を検出して保存された地図と照合する画像ローカライゼーションなどのタスクが含まれます。同時自己位置推定と地図作成(SLAM)技術は、デバイスのリアルタイム位置を追跡しながら環境の地図を作成します。
例えば、チューリッヒ空港は、屋内ナビゲーションにGoogle MapsのLive Viewを導入した世界初の空港です。乗客はスマートフォンのカメラを通して、現実の環境上に重ね合わされた矢印や方向指示を確認し、ターミナル内からゲート、ショップ、各種サービスへスムーズに移動できます。これにより、複雑な屋内空間でのナビゲーションが容易になり、乗客の利便性が向上します。

Fig 3. チューリッヒ空港では、コンピュータビジョンとARを活用して屋内での乗客案内を行っています。
Link to this sectionAIナビゲーションシステムによる交通安全の向上#
都市の道路は日々混雑を増しています。交通量の増加、混雑する歩道、絶え間ない人流の中で、交通を円滑かつ安全に保つことは、大きな課題となっています。この混乱を管理するため、多くの都市がAIとコンピュータビジョンを導入しています。
交差点や道路沿いに設置されたスマートカメラとセンサーは、常に視覚データを取得しています。その映像をリアルタイムで処理することで、事故の検知、交通流の監視、道路の陥没の発見、不法駐車や危険な歩行者行動の特定を行っています。
興味深い例として、中国・杭州のスマート空港高速道路が挙げられます。杭州市内と蕭山国際空港を結ぶこの20kmの高速道路には、高解像度カメラとミリ波レーダーが設置されました。これらのデバイスで継続的に収集された映像およびセンサーデータは、コンピュータビジョンを用いて分析されます。
システムは単なる録画にとどまらず、道路上で何が起きているかを解釈します。コンピュータビジョンのアルゴリズムは、車両の衝突検知、交通違反の認識、さらには高速道路の出口付近での歩行者や異常行動を特定します。これにより、現場に職員が向かうことなく、数秒以内にインシデントへの対応が可能になります。
データはデジタルツインにもフィードされ、実際の交通状況、車両の詳細、発生しつつある渋滞などをリアルタイムで表示する3D仮想モデルを構成します。交通管理者はこの視覚インターフェースを監視することで、交通流の管理、スマートアラートの発信、迅速かつ正確な事故対応を実現しています。
Link to this sectionコンピュータビジョンによる自律移動ナビゲーション#
今日のナビゲーションは、単にA地点からB地点へ移動するだけのものではありません。人々の移動、貨物の管理、リアルタイムでの意思決定を行うインテリジェントシステムの極めて重要な一部となっており、道路上だけでなく倉庫内でも活用されています。
これらのシステムの中心にあるのはコンピュータビジョンであり、機械が視覚データを解釈して即座に環境へ応答することを可能にします。いくつかの具体例を通して、この技術がどのように環境ごとのナビゲーションを変革しているかを見ていきましょう。
Link to this sectionコンピュータビジョンでナビゲートする倉庫ロボット#
ロボットは、特に大規模な倉庫運営において物流の未来に欠かせない存在となっています。Eコマース需要の増大に伴い、コンピュータビジョンを搭載した機械が複雑な環境内をナビゲートし、荷物を仕分け、在庫を迅速かつ精密に管理することへの依存度が高まっています。
例えば、Amazonのフルフィルメントセンターでは、75万台以上のロボットが人間と協働し、業務を効率的に支えています。これらのロボットは、混雑した倉庫内でのナビゲーション、アイテムの識別、迅速かつ正確な意思決定を行うためにコンピュータビジョンをフル活用しています。
その一つが、在庫処理を迅速化するために設計されたロボットプラットフォーム「Sequoia」です。Sequoiaは高度なコンピュータビジョンを使用して入荷製品をスキャン、計数、整理し、保管およびピッキングのプロセスを合理化します。
同様に、ロボットアームの「Vulcan」は、カメラと画像解析を使用して棚からアイテムを安全に取り出します。各オブジェクトの形状や位置に基づいてグリップを調整し、人間の助けが必要なときを認識することも可能です。一方で、ビジョン対応ロボット「Cardinal」は仕分けに特化しており、混ざった荷物の山をスキャンし、正しい出荷用カートへ正確に配置します。

Fig 4. 荷物の山から正確にアイテムを持ち上げるCardinal。
Link to this section自律走行車ナビゲーションにおけるコンピュータビジョン#
これまで、コンピュータビジョンが人とロボットの両方のナビゲーションを助ける仕組みを見てきましたが、これは自動運転車のような自律システムにおいても同様に不可欠です。自動運転車のナビゲーションは、車両がリアルタイムで見ているものと、それをどのように理解するかに全て依存しています。
良い例としてTesla Visionシステムがあります。Teslaはカメラのみで自動運転を実現するアプローチを採用しており、レーダーや他のセンサーを取り除き、車の周囲を360度見渡せるカメラネットワークに置き換えました。これらのカメラは視覚データをFull Self-Driving(FSD)コンピュータに送り、ディープニューラルネットワークを用いて環境を解釈し、瞬時の運転判断を下しています。
システムは目に見える情報を基に、ハンドル操作、加速、ブレーキ、車線変更のタイミングを決定します。これは人間のドライバーと同じプロセスを、視覚入力のみで行うものです。Teslaは車両フリートから収集した膨大な実走行データを学習させることで、このシステムを継続的に改善しています。

Fig 5. Teslaによる安全な自律走行ナビゲーション(出典: Tesla)。
Link to this sectionナビゲーションにおけるコンピュータビジョンの利点と課題#
精度、安全性、リアルタイムの意思決定が不可欠なナビゲーションシステムにおいて、コンピュータビジョンを採用する主な利点は以下の通りです。
- 燃料消費の削減: 渋滞を回避するルートやストップ・アンド・ゴーを避けるルートを選択することで、コンピュータビジョンは燃料消費量と移動時間を全体的に抑制し、日々の通勤をより効率的にします。
- 道路の劣化やインフラ問題の検出: ビジョンベースのソリューションは、路面の陥没、薄れた車線標示、損傷した標識、破損したインフラなどをスキャンし、保守チームに信頼性の高いリアルタイムデータを提供できます。
- 他のAIツールとのシームレスな統合: コンピュータビジョンを音声アシスタント、行動予測モデル、ルート最適化アルゴリズムと組み合わせることで、極めてインテリジェントでパーソナライズされたナビゲーション体験を構築できます。
コンピュータビジョンはナビゲーションに多くの恩恵をもたらしますが、ソリューションを導入する際には考慮すべき重要な制限もあります。主要な課題を以下に挙げます。
- 汎化性の欠如: 特定の環境やシナリオで学習されたモデルは、再学習なしに新しい環境や状況に展開された際、対応に苦慮することがあります。
- 照明による制限: ビジョンシステムは、良好な照明と明確な天候下で十分に機能するように設計されています。霧、激しい雨、暗闇などでは、LiDARやレーダーのような他のセンサーと組み合わせない限り、パフォーマンスが低下します。
- プライバシーリスク: カメラを使用するナビゲーションシステムは、同意なしに人や私有地を捉える可能性があります。これは開発および運用過程で慎重に対処すべきプライバシー上の問題を引き起こします。
Link to this section重要なポイント#
コンピュータビジョンは、地図をよりダイナミックにし、交通システムをスマートにし、モビリティをより利用しやすくすることで、ナビゲーションを再構築しています。没入型3Dプレビュー、ARガイダンス、自律輸送技術によって、静的だったルートはリアルタイムでインタラクティブな体験へと進化しました。
技術の進歩とともに、今後はよりインクルーシブ(包摂的)で適応性が高く、責任あるシステム作りへ焦点がシフトしていくでしょう。多様な環境下での精度向上、パフォーマンスの維持、ユーザープライバシーの保護が、今後の継続的な進歩の鍵となります。ナビゲーションにおけるコンピュータビジョンの未来は、設計と影響の面でインテリジェントであると同時に思慮深いソリューションを構築することにあります。
ぜひ成長中のコミュニティにご参加ください!AIについて学ぶにはGitHubリポジトリを探索し、ライセンスオプションを確認してビジョンAIプロジェクトを始めましょう。小売業におけるAIや農業におけるコンピュータビジョンといったイノベーションに興味がありますか?当社のソリューションページで詳細をご覧ください!






