Ultralytics YOLO26がNMSを削除する理由と、それが展開をどのように変えるのか
Ultralytics YOLO26がどのように真のエンドツーエンドのNMSフリー推論を実現するか、そして後処理の削除がなぜエクスポートとエッジ展開を簡素化するのかを発見してください。
1月14日、当社はコンピュータビジョンモデルの最新世代であるUltralytics YOLO26をリリースしました。YOLO26での当社の目標は、単なる精度や速度の向上ではなく、現実世界のシステムにおいて物体検出モデルをどのように構築しデプロイするかを再考することでした。
コンピュータビジョンが研究段階から本番環境へと移行するにつれて、モデルはCPU、エッジデバイス、カメラ、ロボット、埋め込みハードウェアでの実行をますます期待されるようになっています。こうした環境では、信頼性、低レイテンシ、そしてデプロイの容易さがパフォーマンスと同等に重要です。
YOLO26はこの現実を念頭に置いて設計されており、推論パイプラインから不必要な複雑さを排除した効率的なエンドツーエンドのアーキテクチャを採用しています。YOLO26で行われた最も重要な革新の一つは、一般にNMSとして知られるNon-Maximum Suppressionを排除したことです。
長年、NMSは物体検出システムの標準的な要素であり、重複した検出結果を整理するための後処理ステップとして使用されてきました。効果的である一方、特にエッジハードウェアにおいては、追加の計算量とデプロイの課題をもたらしていました。
YOLO26では、異なるアプローチを採用しました。予測が生成され学習される仕組みを再考することで、真のエンドツーエンドかつNMSフリーな推論を実現しています。モデルは外部のクリーンアップステップや人手によるルールに頼ることなく、直接最終的な検出結果を出力します。これによりYOLO26はより高速になり、エクスポートが容易になり、幅広いハードウェアプラットフォーム全体でより確実にデプロイできるようになります。
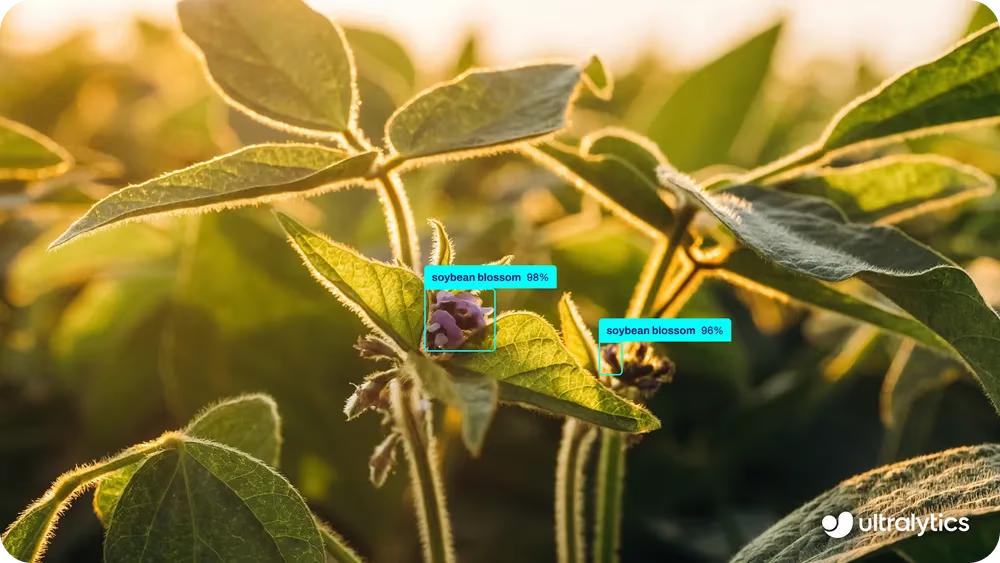
図1. Ultralytics YOLO26を使用して画像内の物体を検出。
本記事では、従来の物体検出がなぜNMSに依存していたのか、それがどのようにデプロイメントのボトルネックとなったのか、そしてYOLO26がどのように回避策の必要性を排除しているのかを詳しく見ていきます。それでは始めましょう!
Link to this section従来の物体検出は重複した検出を生成する#
NMSとは何か、そしてなぜYOLO26でそれを削除したのかを掘り下げる前に、まずは一歩下がって、従来の物体検出モデルがどのように予測を生成しているかを見てみましょう。
従来の物体検出モデルは、同じ物体に対して複数の重なり合うバウンディングボックスを生成することがよくあります。これらのボックスはすべて画像内の同一の物体を参照しているにもかかわらず、それぞれが個別の信頼度スコアを持っています。
これが起こるのにはいくつかの理由があります。第一に、モデルは多くの空間位置と異なるスケールで同時に予測を行います。これはモデルが異なるサイズの物体を検出するのに役立ちますが、同時に近接する位置がすべて独立して同じ物体を特定する可能性があることを意味します。
第二に、多くの物体検出システムはアンカーベースのアプローチを使用しており、各位置の周囲に多数の候補ボックスを生成します。これにより物体を正確に見つける可能性は高まりますが、同時に重なり合う予測の数も増加します。
最後に、グリッドベースの検出自体が必然的に冗長性をもたらします。物体が複数のグリッドセルの境界付近にある場合、複数のセルがその物体のボックスを予測し、その結果、重複する検出が複数生成されます。
そのため、モデルの生の出力には一つの物体に対して複数のボックスが含まれることがよくあります。結果を利用可能にするためには、これらの冗長な予測をフィルタリングして、最終的な検出結果を一つだけ残す必要があります。
Link to this sectionNon-Maximum Suppressionを理解する#
物体検出モデルが同じ物体に対して複数の重なり合うバウンディングボックスを生成したら、それらの結果は使用される前に整理される必要があります。ここでNon-Maximum Suppressionが適用されます。
Non-Maximum Suppressionは、モデルが予測を終えた後に実行される後処理ステップです。その目的は、各物体が単一の最終的なバウンディングボックスで表現されるように、重複した検出を削減することです。
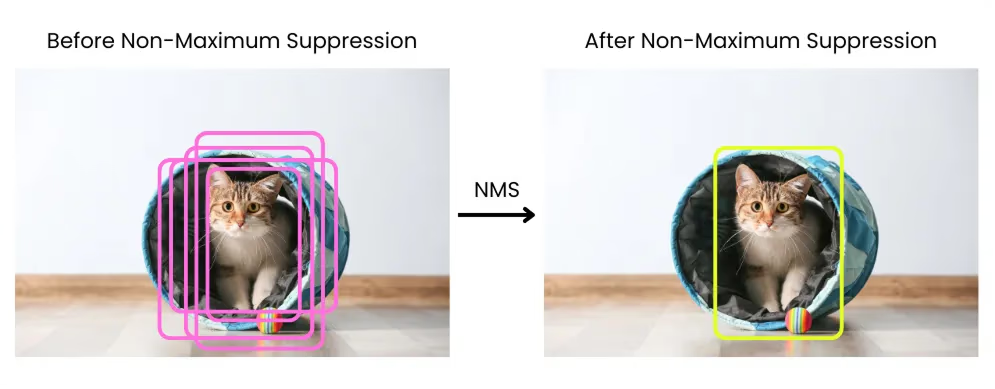
図2. NMSの概要。画像提供:著者。
このプロセスは、信頼度スコアと重なり具合に基づいてバウンディングボックスを比較することで機能します。非常に信頼度の低い予測から先に削除されます。
残ったボックスは信頼度順にソートされ、最も高いスコアを持つボックスが最良の検出結果として選択されます。その選択されたボックスが他のボックスと比較されます。
もし別のボックスとの重なりが大きすぎる場合、そのボックスは抑制され削除されます。重なりは、通常Intersection over Unionを使用して測定されます。これは2つのボックスで共有される面積と、両方がカバーする合計面積の比率を計算する指標です。このプロセスは、最も信頼度が高く、重なり合わない検出結果だけが残るまで繰り返されます。
Link to this sectionNMSがデプロイを複雑にする理由#
Non-Maximum Suppressionは重複した検出のフィルタリングに役立ちますが、モデルが研究段階から現実世界のデプロイに移行すると、より顕著になる課題も生じます。
最大の問題の一つはパフォーマンスです。NMSは推論の後に実行され、どのボックスを残すかを決定するためにバウンディングボックス同士を比較する必要があります。
このプロセスは計算コストが高く、効率的に並列化することが困難です。エッジデバイスやCPUベースのシステムでは、この追加作業が目に見えるレイテンシを増加させ、リアルタイムの要件を満たすことを難しくします。
また、NMSはデプロイの複雑さを増大させます。これはモデル自体の一部ではないため、後処理コードとして別個に実装する必要があります。
ランタイムやプラットフォームによってNMSの扱いが異なるため、ターゲット環境ごとにカスタム実装を維持しなければならないことがよくあります。一つの環境で機能するものが別の環境ではわずかに異なる動作をする可能性があり、デプロイが不安定になり、スケールが難しくなります。
ハードウェアの最適化も別の課題です。NMSは、ニューラルネットワークの操作を効率的に実行するように設計された特殊なAIアクセラレータにはうまく適合しません。その結果、モデルが最適化されたハードウェア上で高速に動作していても、NMSがボトルネックとなり全体のパフォーマンスを制限してしまうことがあります。
これらの要因に加え、NMSは信頼度しきい値や重なりしきい値などの手動で選択されたパラメータに依存しています。これらの設定は結果に大きな影響を与える可能性があり、データセット、アプリケーション、またはハードウェアごとに調整が必要な場合がよくあります。これにより、本番システムでの動作予測が困難になり、構成の手間も増えます。
Link to this sectionエンドツーエンドの物体検出推論の解説#
Non-Maximum Suppressionの制限により、我々は物体検出モデルが推論時にどのように振る舞うべきかを再考することになりました。多くの重なり合う予測を生成して後で整理する代わりに、より根本的な問いを立てました。
もしモデルが直接最終的な検出結果を出力できたらどうなるでしょうか?この問いが、エンドツーエンドの物体検出推論の核にあります。エンドツーエンドのシステムでは、モデルは外部のクリーンアップステップに頼ることなく、検出プロセスの全体を最初から最後まで処理するように学習されます。
多くの候補ボックスを生成して推論後にフィルタリングするのではなく、モデルは信頼度が高く重なり合わない少数の予測を独自に生成することを学習します。重複する検出は、後処理によって削除されるのではなく、ネットワーク内部で解消されます。
より新しいモデルアーキテクチャは、このアプローチが実行可能かつ実用的であることを示しました。適切な学習戦略を用いれば、モデルは多くの競合する予測ではなく、各物体を単一の予測に関連付けることを学習でき、その根源から冗長性を削減できます。
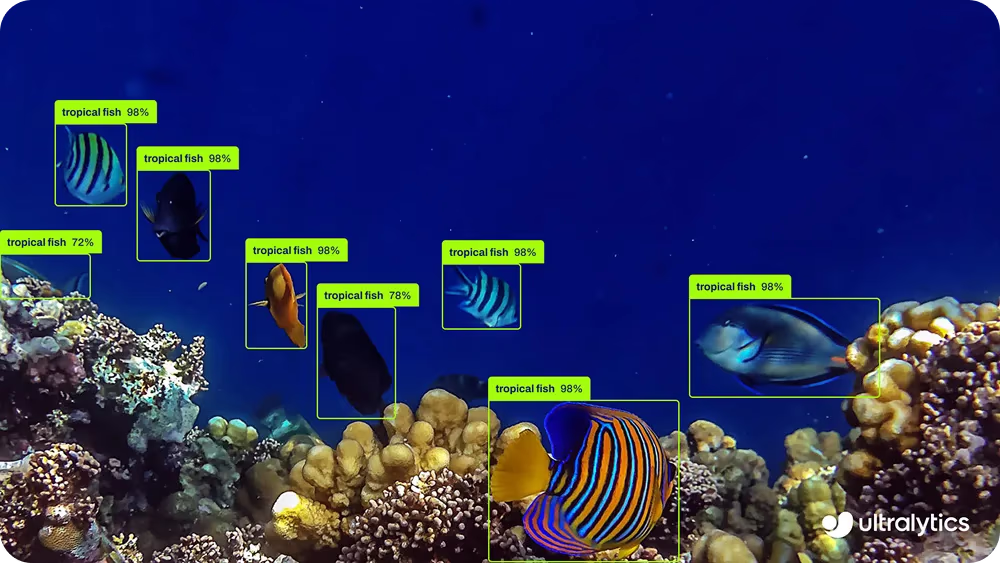
図3. Ultralytics YOLO26を使用した物体検出の例。
これが機能するためには、学習方法も変える必要があります。多くの予測が同じ物体を取り合わないようにし、モデルは一つの明確な決定を下し、より少なく、より確実な検出結果を出力するように学習します。
全体的な結果として、推論パイプラインがよりシンプルになります。重複はすでに内部で解消されているため、推論時にNon-Maximum Suppressionは必要ありません。モデルの出力がそのまま最終的な検出結果となります。
このエンドツーエンドの設計により、デプロイも容易になります。後処理ステップやプラットフォーム固有のNMS実装が不要なため、エクスポートされたモデルは完全に自己完結しており、異なる推論フレームワークやハードウェアターゲット全体で一貫した動作をします。
当社のリード・パートナーシップ・エンジニアであるFrancesco Mattioliが説明するように、「真のエンドツーエンド学習とは、微分可能性を損ないデプロイを複雑にする人手による後処理ステップなしに、モデルがピクセルから予測まで全てを処理すべきであることを意味します」。
Link to this sectionUltralytics YOLO26がNMSを排除する方法#
YOLO26は、後処理で整理するのではなく、検出がどのように学習され生成されるかを変更することでNon-Maximum Suppressionを排除しています。多くの予測が同じ物体を競い合うようにするのではなく、YOLO26は物体と出力の間に明確な一対一の関係を学習するようにトレーニングされています。
これは、学習可能なクエリベースの検出によって部分的に可能となっており、モデルが多くの重なり合う候補ではなく、各物体に対して単一の信頼性の高い予測を生成することに集中するのを助けます。各物体は一つの予測に関連付けられ、自然に重複した検出が減少します。
この振る舞いは、学習中の整合性のあるマッチング戦略によって強化され、モデルが重なり合う予測を生成するのではなく、物体ごとに一つの確実な決定を下すように促します。最終的に、モデルはより少ない予測を生成しますが、それぞれが最終的な検出を表しています。
Link to this sectionなぜDFLの削除がNMSフリーな検出を可能にしたのか#
YOLO26においてNMSフリーな推論を可能にするもう一つの重要な革新は、Distribution Focal Loss(DFL)の排除です。以前のYOLOモデルでは、DFLは単一の値を予測するのではなく、考えられるボックス位置の分布を予測することでバウンディングボックスの回帰を改善するために使用されていました。
このアプローチは位置特定精度を向上させましたが、一方で検出パイプラインに複雑さも加えました。その複雑さが、真のエンドツーエンド推論へと移行する際の制限となりました。
DFLは追加の計算量と固定された回帰範囲を導入し、それがモデルにとってクリーンな一対一の物体割り当てを学習することを困難にし、Non-Maximum Suppressionのような後処理ステップへの依存度を高めていました。YOLO26では、DFLを削除し、バウンディングボックスの回帰をよりシンプルで直接的なものに再設計しました。
分布ベースの出力に頼る代わりに、モデルはより少なく、より確実な検出をサポートするような方法で正確なボックス座標を予測することを学習します。この変更は、重複する予測を根源から削減し、バウンディングボックス回帰をYOLO26のエンドツーエンドかつNMSフリーな設計に合わせる助けとなります。
Link to this sectionUltralytics YOLO26はNMSフリーであり、デプロイが容易#
NMSフリーな設計により、YOLO26は真のエンドツーエンドモデルとなっています。これはモデルのエクスポートに重要な影響を与えます。
エクスポートとは、トレーニングされたモデルを、ONNX、TensorRT、CoreML、OpenVINOのようにトレーニング環境外で実行可能な形式に変換することを指します。従来のパイプラインでは、Non-Maximum Suppressionがモデル自体の一部ではないため、このプロセスが破綻することがよくありました。
NMSを削除することで、YOLO26はこの問題を完全に回避します。エクスポートされたモデルには、最終的な検出結果を生成するために必要なすべてがすでに含まれています。
これにより、エクスポートされたモデルは完全に自己完結し、推論フレームワークやハードウェアターゲット間でのポータビリティが向上します。サーバー、CPUのみのシステム、埋め込みデバイス、またはエッジアクセラレータのいずれにデプロイされても、同一のモデルが首尾一貫した振る舞いをします。エクスポートしたものがそのまま実行されるため、デプロイがより簡単になります。
このシンプルさは、エッジアプリケーションにとって特に重要です。例えば、YOLO26はドローンのようなデバイスに簡単にデプロイでき、作物のモニタリング、フィールド検査、植物の健康分析などのユースケースに利用可能です。これらでは限られた計算リソースと電力予算のため、複雑な後処理パイプラインは実用的ではありません。モデルが直接最終的な検出結果を出力するため、追加の処理ステップなしで軽量なハードウェア上で確実に動作します。

図4. Ultralytics YOLO26はドローンのようなエッジデバイスへのデプロイが容易です。
要するに、NMSフリーな推論はエクスポートとデプロイの摩擦を取り除き、よりクリーンで信頼性の高いビジョンシステムを実現します。NMSは回避策でした。YOLO26はもう回避策を必要としません。
Link to this section重要なポイント#
YOLO26は、後から整理するのではなく、重複検出の根本的な問題を解決することでNon-Maximum Suppressionを排除しています。そのエンドツーエンドの設計により、モデルは直接最終的な検出結果を出力できるため、異なるハードウェア間でのエクスポートとデプロイがよりシンプルで一貫したものになります。NMSは初期のシステムにおいては有用な回避策でしたが、YOLO26にはもはや必要ありません。
当社のコミュニティに参加し、GitHubリポジトリをチェックしてAIについてさらに学びましょう。AI in agricultureやcomputer vision in retailに関する当社のソリューションページを探索してみてください。ライセンスオプションを確認し、今日からビジョンAIを始めましょう!






