Poz tahmini için Ultralytics YOLO26 ile diğer Ultralytics YOLO modelleri
Ultralytics YOLO26'nın daha iyi insan olmayan anahtar nokta desteği, daha hızlı yakınsama, iyileştirilmiş tıkanma yönetimi ve verimli gerçek zamanlı dağıtım ile poz tahminini nasıl iyileştirdiğini keşfet.
Birinin duruşuna baktığında kambur durup durmadığını, öne eğildiğini veya dik durduğunu fark etmek kolaydır. İnsanlar, vücudun farklı bölümlerinin birbirleriyle nasıl ilişkili olduğunu hızla anlayabilir.
Bu, günlük hayatta hareketi ve beden dilini yorumlama biçimimizin ayrılmaz bir parçasıdır. Ancak makineler için bu tür bir görsel kavrayış kendiliğinden gerçekleşmez. Bir sisteme hareketi ve yapıyı tanımayı öğretmek, görüntüleri anlamlı bir şekilde yorumlamasını sağlayan gelişmiş derin öğrenme ve computer vision teknikleri gerektirir.
Özellikle pose estimation, bir bilgisayarlı görü modelinin benzer bir kavrayış geliştirmesini mümkün kılan bir yapay zeka tekniğidir. Model, görüntüdeki bir nesneyi basitçe tespit etmek yerine, önemli yapısal noktaları temsil eden anahtar noktaları tahmin eder.
Bu anahtar noktalar vücut eklemlerine, hayvan uzuvlarına, makine bileşenlerine veya mahkeme köşeleri gibi sabit noktalara karşılık gelebilir. Bu noktaları tanımlayıp takip ederek sistem; konumu, hizalamayı ve hareketi yapılandırılmış ve ölçülebilir bir şekilde anlayabilir.
Pose estimation daha fazla gerçek dünya senaryosuna uygulandıkça, modellerin insan dışı anahtar noktaları, karmaşık sahneleri ve özel veri kümelerini daha etkili bir şekilde işlemesi gerekir. Örneğin, Ultralytics YOLO26 gibi son teknoloji modeller, pose estimation gibi bilgisayarlı görü görevlerini destekler ve esnekliği ile genel performansı artırmak için tasarlanmış mimari ve eğitim iyileştirmeleriyle önceki YOLO pose modellerinin üzerine inşa edilir.
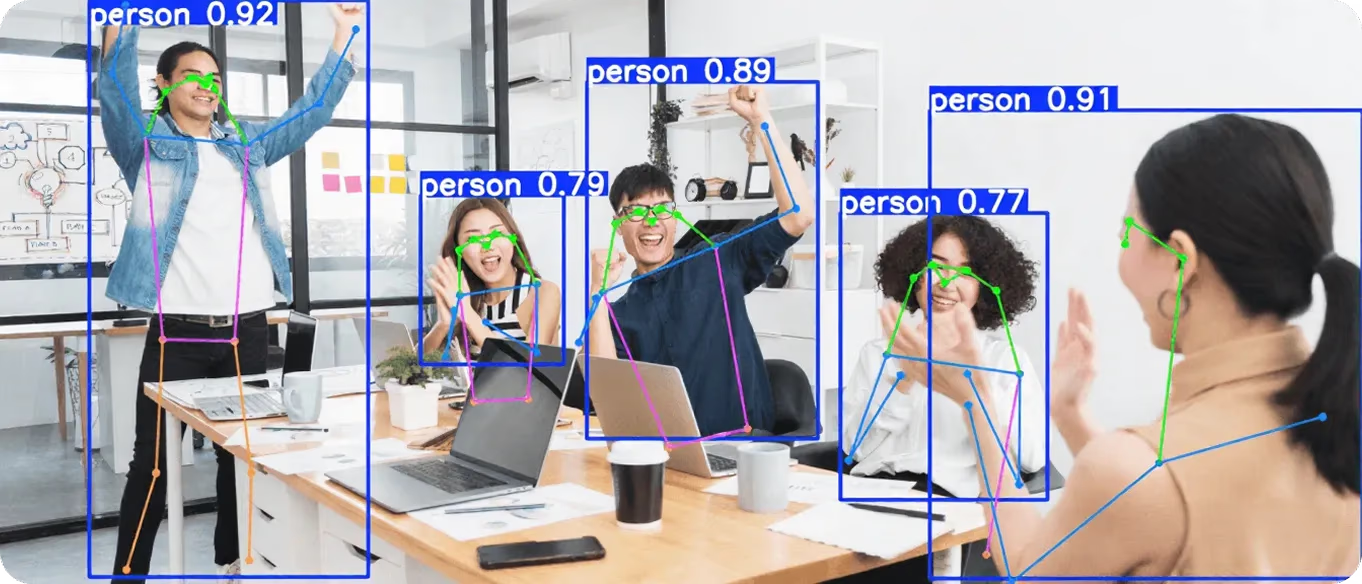
Şekil 1. YOLO tarafından sağlanan bir pose estimation örneği (Source)
Bu makalede, YOLO26-pose'u önceki Ultralytics YOLO pose modelleriyle karşılaştıracağız ve karmaşık sahnelerde esnekliği, yakınsama hızını ve performansı nasıl artırdığını keşfedeceğiz. Başlayalım!
Link to this sectionPoz tahmini nedir?#
Ultralytics YOLO pose modellerini karşılaştırmaya geçmeden önce, bilgisayarlı görü bağlamında pose estimation'ın aslında ne anlama geldiğine daha yakından bakalım.
Pose estimation, bir görüntü veya video karesindeki belirli anahtar noktaları tespit etmek ve takip etmek için kullanılan bir tekniktir. Bu anahtar noktalar, insan vücudundaki eklemler, bir hayvanın uzuvları, bir makinenin bileşenleri veya bir sahnedeki sabit referans noktaları gibi önemli yapısal noktaları temsil edebilir.
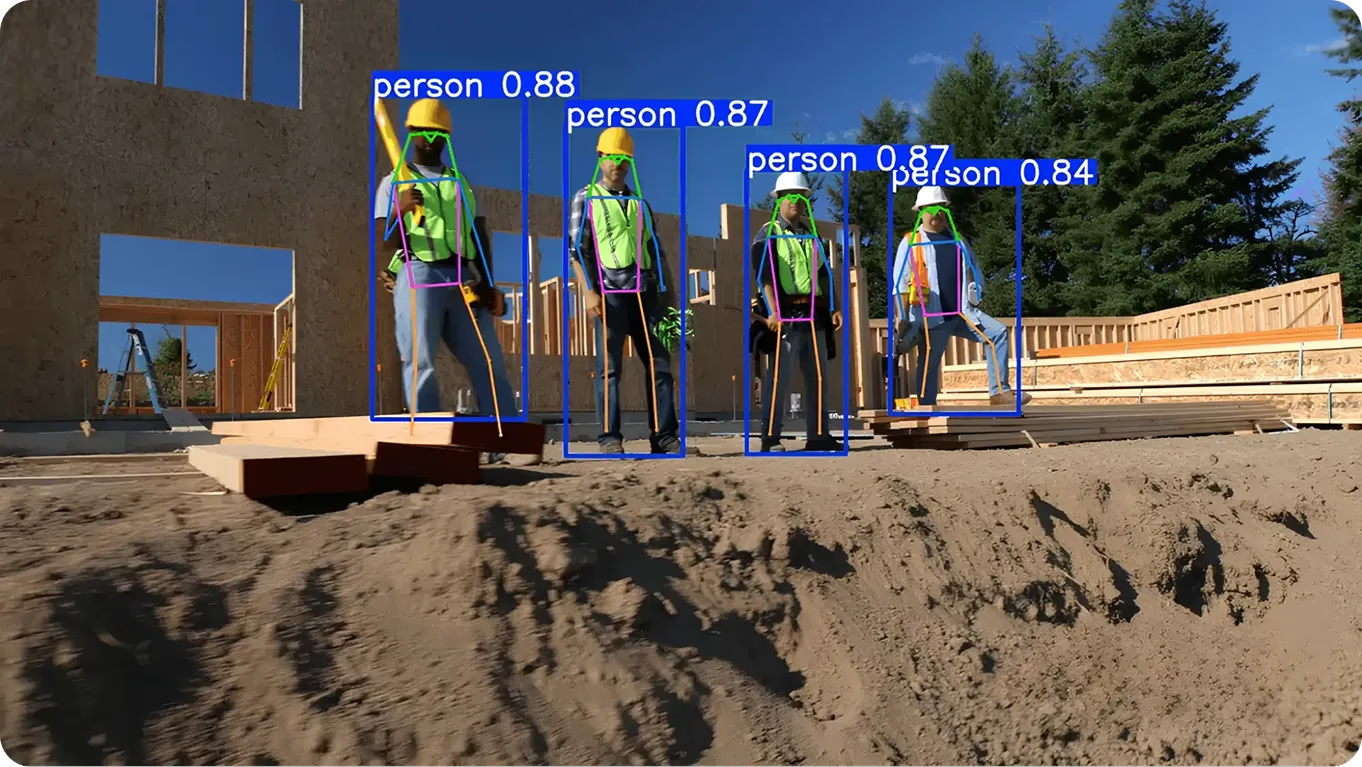
Şekil 2. İnsan pose estimation kullanılarak işçilerin duruşunun tahmin edilmesi (Source)
Bu noktaların koordinatlarını tanımlayarak, bir model nesnenin nasıl konumlandığını ve zaman içinde nasıl hareket ettiğini anlayabilir. Tüm görüntüye tek bir etiket atayan görüntü sınıflandırmasından veya nesnelerin etrafına sınırlayıcı kutular çizmeye odaklanan nesne algılama modellerinden farklı olarak, pose estimation yapı ve hareket hakkında daha ayrıntılı uzamsal bilgi sağlar.
Link to this sectionYOLO26-pose'a genel bakış#
YOLO26-pose, YOLO26n-pose gibi hafif seçenekler ve YOLO26m-pose, YOLO26l-pose ve YOLO26x-pose gibi daha büyük modeller dahil olmak üzere birden fazla model varyantında veya boyutunda mevcuttur. Bu, ekiplerin donanım ve performans ihtiyaçlarına bağlı olarak hız ve doğruluk arasındaki doğru dengeyi seçmelerine olanak tanır.
Ultralytics ayrıca, baştan başlamak zorunda kalmaman için COCO veri kümesi (özellikle insan duruş tahmini için COCO-Pose veya COCO anahtar noktaları ek açıklamaları) gibi büyük ve genel veri kümeleri üzerinde eğitilmiş önceden eğitilmiş pose modelleri sunar. Çoğu durumda ekipler, bu modelleri belirli anahtar noktalara, düzenlere veya ortamlara uyarlamak için kendi veri kümeleri üzerinde ince ayar (fine-tune) yaparlar.
Bu süreç tipik olarak, anahtar nokta koordinatlarını ve sınıf etiketlerini yapılandırılmış bir biçimde tanımlayan özel ek açıklama dosyalarının hazırlanmasını içerir. Bu ek açıklamalar, anahtar noktaları her görüntü içindeki belirli piksel koordinatlarıyla eşleştirerek modelin eğitim sırasında hassas uzamsal ilişkileri öğrenmesini sağlar.
Önceden eğitilmiş modelleri kullanmak eğitimi hızlandırır, veri gereksinimlerini azaltır ve projelerin daha verimli bir şekilde üretime geçmesine yardımcı olur.
Link to this sectionİnsan pose estimation'ın gerçek dünya uygulamaları#
İşte pose estimation'ın önemli bir rol oynadığı bazı gerçek dünya kullanım durumlarına genel bir bakış:
- Sağlık hizmetleri ve rehabilitasyon: Klinisyenler, duruşu değerlendirmek, iyileşme sürecini izlemek ve fizik tedavi sırasında hareket modellerini analiz etmek için pose modellerini kullanabilirler.
- Otonom sistemler: Dronlar ve akıllı kameralar, dinamik sahnelerdeki nesne yönelimini ve hareketini daha iyi anlamak için duruş bilgisinden yararlanabilir.
- İş yeri güvenliği: Kuruluşlar, potansiyel güvenlik risklerini belirlemeye yardımcı olmak için vücut konumlandırmasını ve tekrarlayan hareketleri izleyebilir.
- Fitness ve kişisel antrenman: Fitness uygulamaları, egzersiz formunu takip etmek, tekrarları saymak ve fitness eğitimleri sırasında sürdürülen duruş ve hareket hakkında gerçek zamanlı geri bildirim sağlamak için pose estimation kullanır.

Şekil 3. Pose estimation, atletik hareket sırasında vücudun anahtar noktalarını takip etmeye yardımcı olabilir. (Source)
Link to this sectionUltralytics YOLO26'nın pose estimation desteğini keşfetme#
Ultralytics YOLO26, eğitimi ve dağıtımı daha pratik hale getirmek için tasarlanmış güncellemelerle önceki Ultralytics YOLO modellerinin üzerine inşa edilmiştir.
Önceki sürümler gibi, birleşik bir çerçevenin parçası olarak pose estimation'ı destekler. Temel fark, YOLO26'nın çok daha geniş bir gerçek dünya kullanım durumu yelpazesinde daha esnek ve kararlı olacak şekilde tasarlanmış olmasıdır.
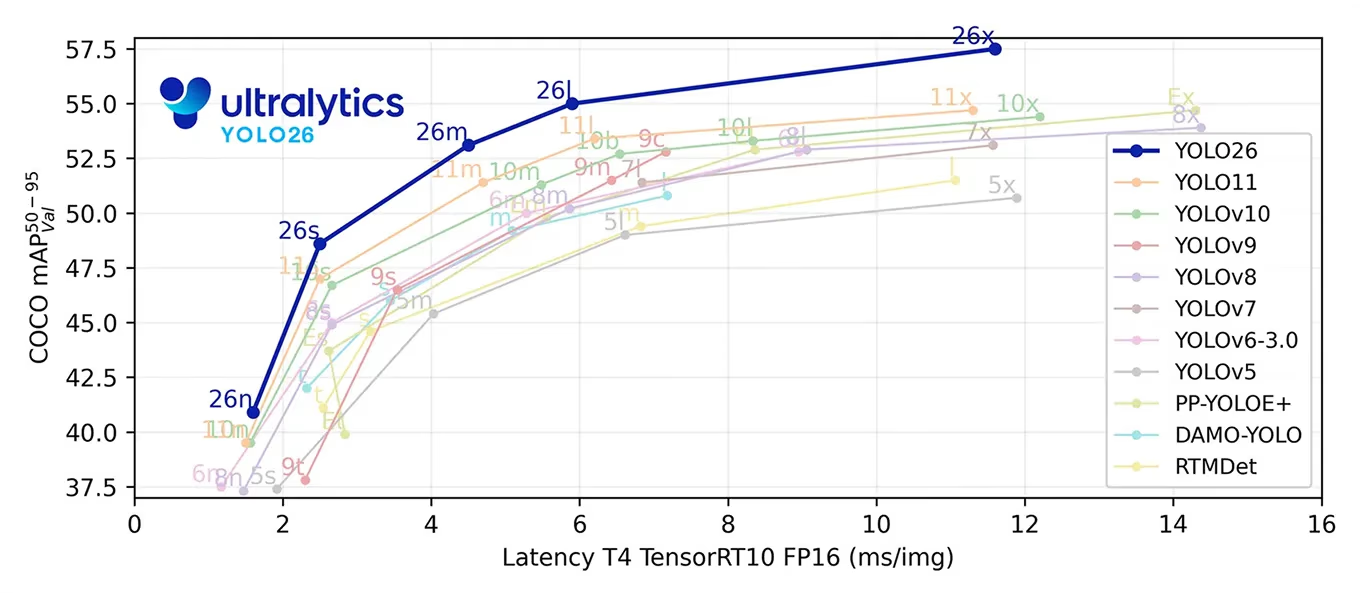
Şekil 4. YOLO26 kıyaslaması (Source)
Daha önceki Ultralytics YOLO pose modelleri büyük ölçüde insan pose datasets tarafından etkilenmişti; bu da eski yöntemlerin parçalarının insan eklem yapıları etrafında optimize edildiği anlamına geliyordu. YOLO26, bu insana özgü varsayımları ortadan kaldırır.
Sonuç olarak, tenis kortunun köşelerini tespit etmek veya diğer özel yapısal işaretleri belirlemek gibi insan dışı anahtar noktalar için daha uygundur. Bu önemlidir, çünkü kutudan çıktığı haliyle (out-of-the-box), önceden eğitilmiş YOLO26-pose modelleri COCO-pose gibi veri kümeleri üzerinde eğitilmiştir ve veri kümesi ek açıklamalarında tanımlanan insan anahtar noktalarını tahmin ederler.
Ancak ekipler, makine bileşenleri, spor sahası işaretleri veya altyapı noktaları gibi farklı türde işaretleri tespit etmek istediklerinde, modelin tipik olarak bu belirli anahtar noktaların etiketlendiği özel bir veri kümesi üzerinde ince ayar yapılması gerekir.
YOLO26, insan eklem yapıları hakkındaki varsayımlara bağlı olmadığı için ince ayar sırasında daha etkili bir şekilde uyum sağlayabilir. Bu esneklik, modelin özel anahtar nokta düzenlerini daha güvenilir bir şekilde öğrenmesini sağlar ve bu da benzersiz anahtar nokta yapılandırmalarına sahip veri kümelerinde doğrulama yaparken iyileştirilmiş değerlendirme metriklerine yol açar.
YOLO26-pose ayrıca, bir nesnenin parçaları kısmen gizlendiğinde veya çok küçük ölçekte göründüğünde anahtar nokta yerelleştirmesini iyileştirmek için tasarlanmıştır. Uzaktaki özneleri, drone görüntülerini veya küçük nesne senaryolarını içeren gerçek dünya sahnelerinde bu, önceki pose modellerine kıyasla daha doğru anahtar nokta tahminlerine yol açabilir.
Bir diğer önemli güncelleme, eğitim sırasında kullanılan iyileştirilmiş kayıp formülasyonudur. Kayıp fonksiyonu (loss function), modelin öğrenirken hatalarını nasıl düzelteceğini belirler.
YOLO26-pose söz konusu olduğunda, bu süreç daha etkilidir; bu da modelin daha hızlı öğrenmesine ve eğitim veri kümesinden bir tam geçişi ifade eden daha az epokta güçlü bir doğruluğa ulaşmasına yardımcı olur.
Genel olarak YOLO26-pose, aynı tanıdık iş akışını korurken, insan dışı anahtar nokta desteği ve eğitim yakınsamasındaki daha net iyileştirmelerle önceki Ultralytics YOLO pose modellerinin üzerine inşa edilmiştir.
Link to this sectionYOLO26-pose ile Ultralytics YOLOv5'in karşılaştırılması#
Ultralytics YOLO modellerinin en eski sürümü olan Ultralytics YOLOv5, öncelikle nesne algılama için oluşturulmuştu. YOLOv5 daha sonra örnek bölümleme (instance segmentation) desteğini içerecek şekilde genişlese de, resmi Ultralytics çerçevesi içinde yerel ve özelleşmiş bir pose estimation başlığı içermez.
Anahtar nokta tespiti gereken ekipler, tipik olarak ayrı uygulamalara veya özel değişikliklere güveniyorlardı. Ultralytics YOLO26, özellikle anahtar noktaları tahmin etmek için tasarlanmış özel bir mimari başlıkla, yerleşik bir görev olarak pose estimation'ı içerir.
Bu, YOLO26-pose modellerinin algılama ve bölümleme ile aynı birleşik iş akışı içinde eğitilebileceği, doğrulanabileceği ve dağıtılabileceği anlamına gelir. Yapılandırılmış anahtar nokta tespitine odaklanan projeler için YOLO26, YOLOv5'in sunduğu olanakların dışında yerel pose desteği ve göreve özgü bir mimari sağlar.
Link to this sectionTemel farklar: YOLO26-pose ile Ultralytics YOLOv8-pose#
Ultralytics YOLOv8, birleşik Ultralytics çerçevesi içinde yerel pose estimation'ı sunarak, algılama ve bölümleme ile aynı iş akışını kullanarak anahtar nokta modellerini eğitmeyi ve dağıtmayı kolaylaştırdı. Geleneksel bir non-maximum suppression (NMS) işlem sonrası hattına güvenir ve sınırlayıcı kutu regresyonu ile eğitim için daha eski kayıp formülasyonlarını kullanır.
YOLO26, pose estimation'ı doğrudan etkileyen mimari ve eğitim güncellemeleriyle bu temel üzerine inşa edilmiştir. Büyük bir fark, uçtan uca tasarımdır. YOLO26, çıkarım (inference) sırasında harici NMS ihtiyacını ortadan kaldırır; bu da dağıtımı basitleştirir ve özellikle CPU'lar ve uç cihazlarda gecikme tutarlılığını artırır.
Bir diğer önemli iyileştirme ise eğitim metodolojisindedir. YOLO26, güncellenmiş kayıp stratejileriyle birlikte MuSGD optimize ediciyi sunar. Pose görevleri için, anahtar nokta belirsizliğinin nasıl modellendiğini iyileştiren Residual Log-Likelihood Estimation'ı entegre eder. Bu değişiklikler birlikte, özellikle karmaşık veya kısmen gizlenmiş sahnelerde daha hızlı yakınsamaya ve daha kararlı anahtar nokta tahminlerine yol açabilir.
Özetle YOLOv8-pose, güçlü ve çok yönlü bir temel oluşturdu. YOLO26-pose ise bu temeli, iyileştirilmiş eğitim verimliliği, daha iyi tıkanıklık (occlusion) yönetimi ve gerçek dünya, insan dışı pose uygulamaları için daha fazla esneklik ile geliştirir.
Link to this sectionYOLO26-pose ile Ultralytics YOLO11-pose: Neler gelişti?#
Ultralytics YOLO11, omurgayı ve özellik çıkarma katmanlarını geliştirerek Ultralytics YOLOv8'in üzerine inşa edilmiştir. FLOP'ları azalttı, parametre verimliliğini artırdı ve güçlü gerçek zamanlı performansı korurken daha yüksek mAP sundu. Pose görevleri için bu, daha hafif bir mimariyle daha iyi anahtar nokta doğruluğu anlamına geliyordu.
YOLO26-pose, daha temel bir mimari değişimle bu ilerlemeyi sürdürüyor. Basitçe ifade etmek gerekirse, YOLO11, YOLOv8'in verimliliğini ve doğruluğunu iyileştirdi; YOLO26 ise bu temel üzerine daha hızlı yakınsama, daha kararlı çıkarım ve karmaşık senaryolarda iyileştirilmiş pose doğruluğu hedefleyen mimari ve eğitim güncellemeleri ekledi.
Link to this sectionNeden pose estimation için YOLO26 modelini kullanmaya başlamalısın?#
Ultralytics YOLO modelleri arasındaki farkları keşfederken, YOLO26-pose'a geçip geçmemeyi merak ediyor olabilirsin.
Kısa cevap, kolay bir yükseltme olduğudur. Hali hazırda Ultralytics YOLOv8-pose veya Ultralytics YOLO11-pose kullanıyorsan, YOLO26-pose'a geçmek genellikle iş akışını yeniden oluşturmak değil, sadece model sürümünü değiştirmek anlamına gelir.
Aynı Ultralytics çerçevesi içinde kalarak insan dışı anahtar noktalar için daha iyi destekten, eğitim sırasında daha hızlı yakınsamadan ve gizlenmiş noktaların daha iyi yönetilmesinden yararlanabilirsin. Çoğu yeni ve mevcut pose projesi için YOLO26-pose'a geçmek, bu iyileştirmeleri en az sürtünmeyle elde etmenin doğrudan bir yoludur.
Bunun yanı sıra YOLO26-pose, PyTorch üzerine kurulu olan ve eğitimi, doğrulamayı ve dağıtımı basitleştiren Ultralytics Python package içinde tam olarak desteklenir. Modeller; ONNX, TensorRT, OpenVINO, CoreML ve TFLite gibi formatlara dışa aktarılabilir, bu da genel iş akışını değiştirmeden GPU'lar, CPU'lar ve uç cihazlar arasında dağıtımı kolaylaştırır.
Link to this sectionÖne çıkanlar#
Ultralytics YOLO26-pose, özellikle insan dışı anahtar noktalarla veya karmaşık sahnelerle çalışırken pose estimation'ı daha esnek ve güvenilir hale getirir. Daha hızlı eğitilir, tıkanıklıkları daha iyi yönetir ve farklı veri kümelerinde daha tutarlı sonuçlar verir. Hali hazırda Ultralytics YOLO pose modellerini kullanan ekipler için YOLO26, mevcut iş akışlarını değiştirmeden net iyileştirmeler sunar.
Yapay zeka hakkında daha fazla bilgi edinmek ister misin? Topluluğumuza ve GitHub depomuza göz at. Robotikte yapay zeka ve tarımda bilgisayarlı görü hakkında bilgi edinmek için çözüm sayfalarımızı keşfet. Lisanslama seçeneklerimizi incele ve bilgisayarlı görü ile bugün bir şeyler inşa etmeye başla!






