اختيار جهاز الحافة المناسب لمشروع الرؤية الحاسوبية الخاص بك
انظر كيف تختار جهاز الحافة المناسب لمشروع الرؤية الحاسوبية الخاص بك بناءً على الأداء، وكفاءة الطاقة، ومتطلبات النشر.
أصبح ذكاء الحافة (Edge AI) سريعاً واحداً من أكبر الاتجاهات في الذكاء الاصطناعي والرؤية الحاسوبية. فهو يوفر ذكاءً لحظياً مباشرة على الأجهزة بدلاً من الاعتماد على الحوسبة السحابية، حيث يتم إرسال البيانات إلى موقع آخر للمعالجة. في الواقع، من المتوقع أن يصل سوق ذكاء الحافة العالمي إلى حوالي 143.06 مليار دولار بحلول عام 2034.
بفضل التطورات التقنية الأخيرة، يعيد ذكاء الحافة تعريف الأتمتة القائمة على الرؤية اللحظية عبر العديد من الصناعات. وتعد مراقبة الجودة في التصنيع مثالاً رائعاً على ذلك.
هنا، تقوم كاميرات الذكاء الاصطناعي البصري بتحليل المنتجات بشكل مستمر على سير ناقل. ويمكن استخدامها لاكتشاف العيوب والشذوذات بسرعة. وهذا أمر بالغ الأهمية بشكل خاص في الصناعات التي تتطلب دقة عالية، مثل تصنيع الأدوات الجراحية.
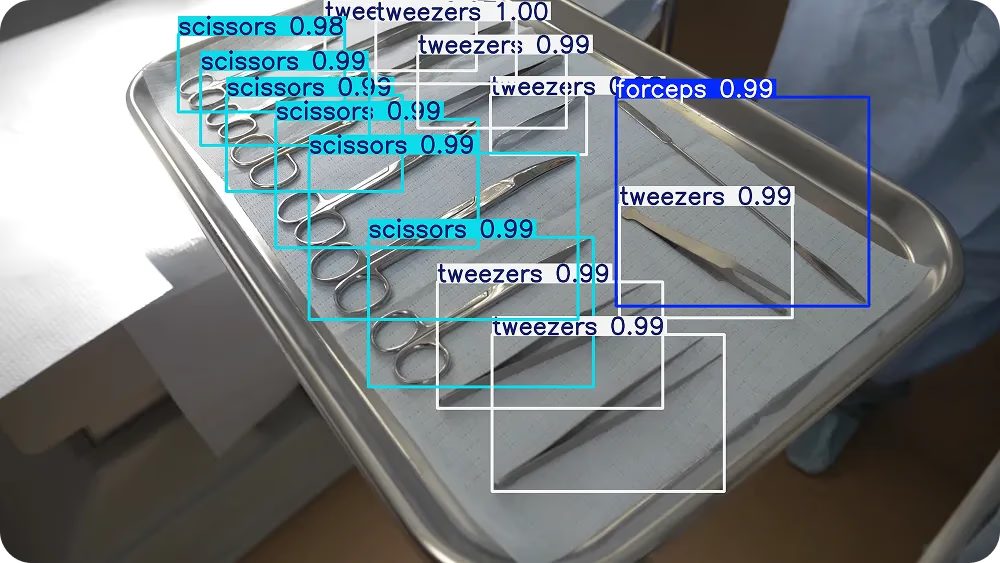
الشكل 1. مثال على استخدام الذكاء الاصطناعي البصري لاكتشاف الأدوات الجراحية
ولكن ما هي أجهزة الحافة بالضبط؟ هذه هي أنظمة الأجهزة القادرة على تشغيل نماذج الذكاء الاصطناعي ونماذج الرؤية الحاسوبية، مثل Ultralytics YOLO26، في الموقع الذي يتم فيه إنشاء البيانات أو بالقرب منه.
قد يكون هذا في أرضية المصنع، أو داخل كاميرا ذكية، أو على متن المركبات ذاتية القيادة. من خلال إجراء الاستدلال محلياً، تتيح هذه الأجهزة أوقات استجابة أسرع. كما أنها تقلل من استخدام النطاق الترددي لأن البيانات البصرية لا تحتاج إلى بثها إلى السحابة.
ومع ذلك، فإن اختيار جهاز الحافة المناسب لمشروع الرؤية الحاسوبية الخاص بك قد يكون أمراً صعباً. فالأجهزة التي تعمل بشكل جيد في بيئة ما قد لا تكون مناسبة لبيئة أخرى.
على سبيل المثال، قد لا يعمل الجهاز الذي يؤدي أداءً موثوقاً به في أرضية المصنع في عمليات فحص الطائرات بدون طيار، حيث تختلف قيود الوزن والطاقة بشكل كبير. يمكن أن يؤدي اختيار الجهاز الخاطئ إلى زيادة التكاليف، وإبطاء عمليات الإطلاق، وتعقيد التوسع.
لهذا السبب يجب على الفرق تقييم عوامل مثل حجم الجهاز، ونطاق الطاقة، والحدود الحرارية، والتوافر الصناعي، بدلاً من مجرد قوة الحوسبة. في هذه المقالة، سوف نستكشف ذكاء الحافة وكيفية اختيار جهاز الحافة المناسب لتطبيق الرؤية الحاسوبية الخاص بك. لنبدأ!
Link to this sectionالفوائد الرئيسية لاستخدام أجهزة الحافة#
قبل أن نتعمق في كيفية اختيار جهاز الحافة المناسب لمشروع الذكاء الاصطناعي البصري الخاص بك، دعنا نأخذ خطوة للوراء ونناقش بعض مزايا استخدام أجهزة الحافة لمشاريع الذكاء الاصطناعي البصري.
إليك بعض الفوائد الرئيسية لنشر الذكاء الاصطناعي البصري عند الحافة:
- الأداء اللحظي: تتم معالجة البيانات في الموقع الذي توجد فيه الكاميرا أو بالقرب منه، مما يتيح استجابات فورية لحالات الاستخدام مثل اكتشاف العيوب، ومراقبة السلامة، والروبوتات. تدعم هذه المعالجة المحلية اتخاذ القرار اللحظي، مما يسمح للأنظمة بالتفاعل فوراً مع الظروف المتغيرة دون الاعتماد على الاتصال السحابي.
- تكلفة أقل للنطاق الترددي: بدلاً من بث الفيديو الخام إلى السحابة، تقوم أجهزة الحافة بنقل البيانات الوصفية أو التنبيهات أو الرؤى ذات الصلة فقط. وهذا يقلل بشكل كبير من حمل الشبكة ونفقات التخزين السحابي.
- العمل دون اتصال: يمكن لمعظم أنظمة الحافة الاستمرار في العمل حتى مع وجود اتصال غير مستقر أو محدود بالإنترنت، وهو أمر شائع في المصانع والمستودعات والبيئات النائية.
- خصوصية أفضل: تظل بيانات الفيديو في الموقع، مما يسهل تلبية متطلبات الخصوصية والامتثال مع تقليل تعريض المعلومات الحساسة للخطر.
- سهولة التوسع عبر العديد من المواقع: تقلل بنيات الحافة من الاعتماد على البنية التحتية السحابية المركزية. وهذا يسمح للفرق بتكرار نفس الإعداد عبر مواقع متعددة بأداء متسق.
Link to this sectionفهم متطلبات تطبيقك#
الخطوة الأولى في اختيار جهاز الحافة المناسب هي فهم ما يحتاجه تطبيقك بالفعل. يجب أن يتوافق الجهاز الذي تختاره مع ما هو متوقع من النظام القيام به، ومدى سرعة تشغيله، ومكان نشره.
يمكنك البدء بتحديد متطلبات الأداء. في حين تتطلب بعض الحلول استدلالاً لحظياً بالذكاء الاصطناعي بمعدل إطارات عالٍ (FPS)، يمكن للبعض الآخر معالجة الإطارات في مجموعات أو دفعات.
تلعب تعقيدات النماذج وحجمها دوراً مهماً أيضاً. غالباً ما يمكن لنماذج اكتشاف الكائنات الخفيفة أن تعمل على أجهزة أصغر وأقل استهلاكاً للطاقة، بينما تتطلب النماذج الأكثر تعقيداً وثقلاً أو خطوط الأنابيب متعددة المراحل قوة حوسبة وذاكرة أكبر.
بعد ذلك، ضع في اعتبارك إعداد بياناتك. ويشمل ذلك دقة الكاميرا، ومعدل الإطارات، وعدد التدفقات المتوازية، وأنواع المستشعرات مثل RGB، أو الحرارية، أو العمق. تؤثر هذه العوامل بشكل مباشر على النطاق الترددي، والإنتاجية، واستخدام الذاكرة، وحمل النظام الإجمالي.
Link to this sectionالمقايضة بين الدقة والكمون#
بعيداً عن متطلبات الأجهزة والبيانات، يلعب اختيار النموذج دوراً حاسماً في أداء النظام العام. تتضمن معظم عمليات نشر الحافة مقايضة بين الكمون (latency) والدقة. عادة ما تكون النماذج ذات الدقة العالية أكثر كثافة من حيث الحوسبة وقد تزيد من وقت الاستدلال.
من ناحية أخرى، قد تضحي النماذج الأسرع ببعض الدقة. الهدف هو إيجاد التوازن الصحيح بين السرعة والدقة بناءً على حالة الاستخدام المحددة والقيود التشغيلية الخاصة بك.
على سبيل المثال، في خطوط إنتاج الغذاء المؤتمتة، تُستخدم أنظمة الرؤية الحاسوبية لفحص المنتجات قبل تعبئتها وشحنها. يجب أن تعمل هذه الأنظمة في الوقت الفعلي لتجنب إبطاء سير الناقل.
ضع في اعتبارك خط تجميع البيتزا، حيث يحتاج النظام إلى التحقق من أن كل بيتزا تحتوي على الإضافات الصحيحة. يمكن لنموذج مثل Ultralytics YOLO26 اكتشاف البيتزا وإضافاتها في الوقت الفعلي، وتحديد المكونات المفقودة أو غير الصحيحة. في هذا السيناريو، يجب أن يكون النموذج دقيقاً بما يكفي لاكتشاف الأخطاء مع كونه سريعاً بما يكفي لمواكبة سرعات الإنتاج على أجهزة الحافة.
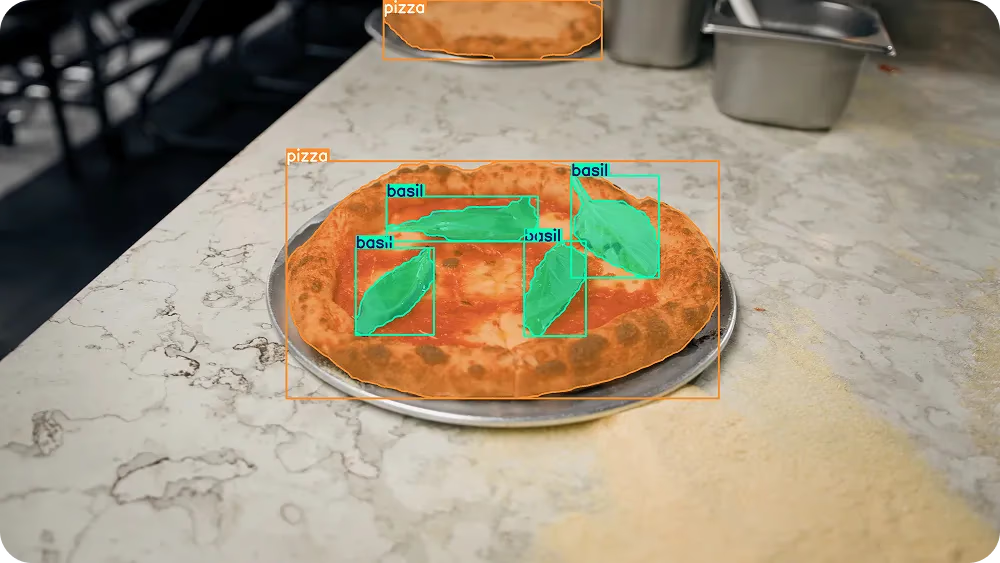
الشكل 2. استخدام Ultralytics YOLO26 لاكتشاف وتقطيع البيتزا وإضافاتها.
Link to this sectionضع في اعتبارك حجم جهاز الحافة#
بصرف النظر عن أداء الحوسبة، يعد الحجم المادي لجهاز الحافة عاملاً مهماً آخر في تخطيط النشر. يؤثر عامل شكل الجهاز (حجمه المادي وشكله ونمط تركيبه وواجهات التوسعة الخاصة به) بشكل مباشر على مدى سهولة دمجه في البيئة وكيفية أدائه في ظروف العالم الحقيقي.
Link to this sectionأنواع أجهزة ذكاء الحافة وعوامل شكلها#
تأتي أجهزة ذكاء الحافة في العديد من عوامل الشكل، بدءاً من خوادم الرف (rack-mounted) وبطاقات تسريع Peripheral Component Interconnect Express (PCIe) إلى وحدات M.2 المدمجة، ومنصات النظام على وحدة (SoM)، وأجهزة الكمبيوتر ذات اللوحة الواحدة (SBCs)، والكاميرات الذكية، وحتى مستشعرات الرؤية الذكية ذات المعالجة القائمة على الرقاقة. يقدم كل تنسيق مقايضات مختلفة في الأداء، وكفاءة الطاقة، والتصميم الحراري، وتعقيد التكامل.
يرتبط حجم الجهاز ارتباطاً وثيقاً بمتطلبات التبريد، وتوافر الطاقة، وبنية النظام الشاملة. تدعم الأنظمة الأكبر مثل أجهزة الكمبيوتر الصناعية المثبتة في الرفوف أو محطات العمل البرجية عادةً وحدات معالجة الرسومات PCIe كاملة الارتفاع، وبطاقات توسعة متعددة، وتبريداً نشطاً. هذه المنصات مناسبة تماماً لمعالجة الكاميرات المتعددة، أو مراكز الحافة المركزية، أو تحليلات الفيديو عالية الإنتاجية.
في المقابل، تم تصميم عوامل الشكل المدمجة مثل مسرعات M.2، و SoMs المثبتة على لوحات حاملة مخصصة، أو SBCs، أو الكاميرات الذكية المتكاملة للبيئات المحدودة المساحة. غالباً ما تعطي هذه الأجهزة الصغيرة الأولوية لكفاءة الطاقة والتبريد السلبي، مما يجعلها مثالية للأنظمة المدمجة، والروبوتات المحمولة، والطائرات بدون طيار، والأكشاك، ووحدات الفحص الموزعة.
في أقصى درجات التصغير، تعتمد بعض عمليات النشر على مستشعرات رؤية ذكية أو منصات تعتمد على المتحكمات الدقيقة (TinyML)، حيث يعمل الاستدلال مباشرة على مستشعر الصورة أو المعالج منخفض الطاقة. تقلل هذه الأنظمة بشكل كبير من البصمة المادية واستهلاك الطاقة ولكنها مناسبة عادةً لأحمال العمل الأكثر ضيقاً وتحسيناً.
تؤدي هذه الاختلافات في الحجم، والنمطية، ونموذج التكامل عموماً إلى فئتين شائعتين لنشر الحافة: عمليات النشر القابلة للتوسع وعمليات النشر المحدودة المساحة. يعالج كل نهج قيود أداء وطاقة وبيئة مختلفة مع تشكيل قابلية الصيانة وتصميم النظام على المدى الطويل.
Link to this sectionعمليات النشر القابلة للتوسع#
تُستخدم مسرعات PCIe وأجهزة الكمبيوتر الشخصية الصناعية أو المثبتة في الرفوف بشكل شائع عندما يتطلب المشروع قوة حوسبة عالية أو يحتاج إلى معالجة البيانات من كاميرات متعددة في وقت واحد. مسرع PCIe هو بطاقة أجهزة يتم تثبيتها داخل كمبيوتر أكبر من خلال فتحة PCIe.
يضيف موارد حوسبة مخصصة، مثل وحدة معالجة الرسومات (GPU) أو مسرع ذكاء اصطناعي آخر، لزيادة قدرة النظام على التعامل مع أحمال عمل الذكاء الاصطناعي. هذا يشبه كيفية تحسين بطاقة الرسومات للأداء في جهاز كمبيوتر مكتبي.
تعد أجهزة الكمبيوتر الصناعية أو المثبتة في الرفوف أنظمة أكبر وأكثر متانة مصممة للتشغيل المستمر في بيئات مثل المصانع، أو أرضيات الإنتاج، أو غرف التحكم. إنها توفر مساحة أكبر للتبريد، وتوسعة الأجهزة، والمكونات ذات الطاقة العالية، مما يجعلها مناسبة تماماً لأحمال العمل الصعبة مثل فحص الجودة بالكاميرات المتعددة أو تحليلات الفيديو واسعة النطاق.
Link to this sectionعمليات النشر المحدودة المساحة#
تعد عمليات النشر المحدودة المساحة شائعة في البيئات التي يجب أن يعمل فيها جهاز الحافة ضمن قيود فيزيائية أو حرارية أو طاقة ضيقة. يشمل ذلك غالباً الكاميرات الذكية المثبتة على خطوط الإنتاج، أو الروبوتات المحمولة، أو الطائرات بدون طيار، أو الأكشاك، أو أنظمة الفحص المدمجة.
في هذه الحالات، يجب أن تكون الأجهزة صغيرة وخفيفة الوزن وموفرة للطاقة مع الاستمرار في تقديم أداء موثوق للذكاء الاصطناعي. خياران شائعان للأجهزة لعمليات النشر هذه هما وحدات M.2 وأجهزة الكمبيوتر ذات اللوحة الواحدة.
وحدة M.2 هي بطاقة توسعة مدمجة تناسب فتحة M.2 داخل نظام مضيف. بينما تعد M.2 مجرد معيار لعامل الشكل والواجهة، إلا أن بعض الوحدات مصممة خصيصاً لتسريع الذكاء الاصطناعي.
تسمح وحدات مسرع الذكاء الاصطناعي هذه للأجهزة الصغيرة بتشغيل نماذج الرؤية الحاسوبية بشكل أكثر كفاءة دون زيادة الحجم أو استهلاك الطاقة بشكل كبير. غالباً ما يتم دمج مسرعات M.2 في الأنظمة المدمجة حيث لا يكون إضافة بطاقة توسعة PCIe كاملة الحجم أمراً عملياً.
في غضون ذلك، جهاز الكمبيوتر ذو اللوحة الواحدة هو كمبيوتر كامل مبني على لوحة دائرة واحدة. إنه يدمج وحدة المعالجة المركزية، والذاكرة، وواجهات التخزين، واتصالات الإدخال/الإخراج (I/O) في عامل شكل مدمج. نظراً لأن كل شيء موجود على لوحة واحدة، تُستخدم SBCs على نطاق واسع في التطبيقات المدمجة وتطبيقات الحافة حيث تكون المساحة محدودة، والبساطة مهمة.
على الرغم من أن الأنظمة المحدودة المساحة تقدم عادةً أداء حوسبة خاماً أقل من الأنظمة الأكبر المثبتة في الرفوف، إلا أنها تتيح الاستدلال على الجهاز بالقرب من المكان الذي يتم فيه إنشاء البيانات. وهذا يقلل من الكمون، ويخفض استخدام النطاق الترددي، ويحسن مرونة النشر في البيئات التي لا تتسع لأجهزة أكبر.
Link to this sectionتسريع الذكاء الاصطناعي المخصص للرؤية المدمجة#
يركز العديد من موردي الأجهزة بشكل خاص على تسريع الذكاء الاصطناعي المدمج والموفر للطاقة للرؤية المدمجة. على سبيل المثال، تقدم Axelera AI مسرعات Metis® AI Processing Unit (AIPU) في عوامل شكل متعددة، بما في ذلك بطاقات PCIe، ووحدات M.2، ولوحات حوسبة متكاملة لعمليات النشر المحدودة المساحة.
من خلال التكامل مع Ultralytics، يمكن تصدير نماذج YOLO المدعومة مثل Ultralytics YOLOv8 و YOLO26 إلى تنسيق Axelera باستخدام حزمة Ultralytics Python وتحسينها عبر Voyager SDK، الذي يتولى الترجمة وكمية INT8 (quantization) لاستدلال فعال على الحافة.
الشكل 3. نظرة على وحدة معالجة الذكاء الاصطناعي Metis من Axelera AI (المصدر)
Link to this sectionضع في اعتبارك استهلاك الطاقة#
يعد استهلاك الطاقة أيضاً قيداً رئيسياً في عمليات نشر الحافة لأنه يؤثر بشكل مباشر على توليد الحرارة ومتطلبات التبريد. إنه يحدد ما إذا كان النظام يمكنه العمل بشكل موثوق داخل حاويات محكمة الإغلاق أو أغلفة صناعية مدمجة.
يصبح هذا حيوياً بشكل خاص في البيئات التي تعمل بالبطاريات مثل الروبوتات المحمولة، أو الطائرات بدون طيار، أو محطات المراقبة عن بعد، حيث يؤثر كل واط (W) على وقت التشغيل واستقرار النظام العام.
يقع معظم أجهزة الحافة في ثلاث فئات طاقة واسعة. إليك نظرة فاحصة على كل منها:
- أجهزة منخفضة الطاقة (<10 واط): تُستخدم عادةً في الأنظمة المدمجة حيث يتطلب الأمر حجماً مدمجاً وتبريداً سلبياً.
- أجهزة متوسطة المدى (10-50 واط): هذه الأجهزة شائعة في بوابات الحافة ونقاط النهاية في المصانع التي تتطلب إنتاجية أعلى مع استمرار العمل ضمن حدود حرارية مضبوطة.
- أجهزة عالية الطاقة (>50 واط): عادة ما تكون هذه الأجهزة مسرعات PCIe أو أجهزة كمبيوتر صناعية مصممة لمعالجة الكاميرات المتعددة وأحمال العمل الثقيلة. غالباً ما تقترن بتبريد نشط وحاويات أكبر.
من المهم أن تضع في اعتبارك أن خصائص حمل العمل تلعب دوراً رئيسياً في تحديد فئة الطاقة المناسبة. تؤدي معدلات الإطارات الأعلى، ونماذج الرؤية الأكبر، وتدفقات الكاميرا المتوازية المتعددة إلى زيادة الطلب على الحوسبة، مما يرفع بدوره استهلاك الطاقة.
في الوقت الحاضر، يركز العديد من موردي الأجهزة على تسريع الذكاء الاصطناعي الموفر للطاقة. على سبيل المثال، تم تصميم وحدات الحافة من DEEPX للاستدلال منخفض الطاقة في عمليات نشر الحافة. توفر معالجات Intel أيضاً ميزات إدارة الطاقة والتحجيم التي تسمح بضبط الأداء بناءً على المتطلبات البيئية ومتطلبات حمل العمل.
Link to this sectionضع في الحسبان التوافر الصناعي ودعم دورة الحياة#
لنقل أنك أكملت بنجاح عملية نشر تجريبية. يعمل النموذج بشكل جيد، وتلبي الأجهزة متطلبات الأداء، ويعمل النظام بشكل موثوق في الاختبار.
التحدي التالي هو توسيع نطاق هذا الحل إلى الإنتاج الكامل. وهنا يصبح التوافر الصناعي ودعم دورة الحياة أمراً بالغ الأهمية.
من المتوقع أن تعمل معظم أنظمة الحافة بشكل مستمر لسنوات. اختيار الأجهزة التي قد يتم إيقاف إنتاجها بعد فترة وجيزة من الطرح يمثل خطراً كبيراً. حتى لو كان الجهاز يعمل بشكل جيد أثناء المرحلة التجريبية، فقد يصبح التزاماً إذا وصل إلى نهاية العمر الافتراضي أو أصبح من الصعب الحصول عليه بمجرد بدء الإنتاج.
يمكن أن تؤدي دورات حياة السوق القصيرة إلى اضطرابات في سلسلة التوريد، وزيادة تكاليف الصيانة، وإجبار الشركات على عمليات إعادة تصميم غير متوقعة. في عمليات النشر متعددة المواقع، يمكن أن يؤدي استبدال المكونات غير المتاحة إلى إبطاء التوسع وتعقيد إدارة النظام.
عادةً ما تقدم الأجهزة المصممة للاستخدام الصناعي جداول زمنية أطول للإنتاج، وسياسات دورة حياة أكثر وضوحاً، ودعماً مستمراً للبرامج الثابتة (firmware) أو البرامج. هذا الاستقرار يجعل من السهل توسيع عمليات النشر دون تغييرات كبيرة في الأجهزة في منتصف الدورة.
قبل الانتهاء من اختيار جهاز الحافة، يمكن للفرق مراجعة خارطة طريق المنتج للشركة المصنعة، والتزامات دورة الحياة، واستراتيجية الدعم طويلة المدى.
Link to this sectionأهمية خبرة الفريق وسهولة الاستخدام#
يعتمد اختيار ونشر جهاز الحافة أيضاً على خبرة فريقك. بعض المنصات أسهل في العمل وتوفر وثائق واضحة، وخطوات إعداد بسيطة، وأدوات جاهزة للاستخدام. يقدم البعض الآخر تحكماً أكبر في الأداء ولكنه يتطلب معرفة تقنية أعمق ومزيداً من الوقت المستغرق في التحسين وتصحيح الأخطاء.
على سبيل المثال، تجعل حزمة Ultralytics Python من السهل تدريب واختبار ونشر نماذج مثل YOLO26. فهي تبسط المهام الشائعة وتدعم أيضاً تصدير النماذج إلى تنسيقات مختلفة مستخدمة في عمليات نشر الحافة. وهذا يسهل على الفرق الانتقال من التطوير إلى أجهزة العالم الحقيقي دون إعادة بناء سير عملهم من الصفر.
بالنسبة للفرق الجديدة في ذكاء الحافة، يمكن لنظام برمجيات قوي وموثق جيداً تقليل وقت التطوير وتقليل مخاطر النشر. قد تفضل الفرق الأكثر خبرة المنصات التي تسمح بمزيد من التخصيص والضبط الدقيق، خاصة في التطبيقات التي تتطلب معالجة الكاميرات المتعددة أو متطلبات زمنية صارمة.
ببساطة، يمكن للأنظمة البيئية للموردين والأدوات أن تحدث فرقاً كبيراً. تساعد الوثائق الواضحة والدعم النشط وخيارات النشر المرنة الفرق على الانتقال بسلاسة أكبر من المشاريع التجريبية إلى أنظمة الإنتاج الكاملة.
Link to this sectionعوامل نشر الحافة الرئيسية التي يتم التغاضي عنها غالباً#
الآن بعد أن غطينا العوامل الرئيسية المشاركة في اختيار جهاز الحافة، دعنا نستعرض بعض التفاصيل العملية التي يمكن أن تحدث فرقاً كبيراً في عمليات النشر في العالم الحقيقي. قد لا تبدو هذه الاعتبارات عاجلة في البداية، لكنها غالباً ما تلعب دوراً حاسماً في اتخاذ القرار وتشكيل مدى سلاسة عمل المشروع بمجرد انتقاله إلى ما بعد المرحلة التجريبية.
Link to this sectionالإدخال/الإخراج، النطاق الترددي، وتوافق البرامج#
غالباً ما يكون الاتصال وتوافق الإدخال/الإخراج من بين التحديات العملية الأولى في عمليات نشر الحافة. عادةً، يجب أن يدعم جهاز الحافة تكوين الكاميرا والمستشعر الخاص بك، بما في ذلك الواجهات الشائعة مثل USB 3.0، و GigE مع الطاقة عبر الإيثرنت (PoE)، و MIPI.
قد تتطلب أنظمة الرؤية الصناعية أيضاً مشغلات أجهزة، أو إشارات مزامنة، أو دعم توقيت محدد لضمان التشغيل الموثوق.
يعد النطاق الترددي عاملاً حاسماً آخر، خاصة في إعدادات الكاميرات المتعددة. حتى الاختلافات الصغيرة بين مخرج الكاميرا وسعة إدخال الجهاز يمكن أن تقلل الإنتاجية أو تقدم كموناً إضافياً.
يلعب توافق البرامج أيضاً دوراً حاسماً. تعتمد بعض عمليات النشر على أطر عمل استدلال خفيفة الوزن مثل NCNN و MNN، والتي تُستخدم عادةً في بيئات الأجهزة المحمولة والمدمجة.
في عمليات نشر المستشعرات الذكية، تدمج أجهزة مثل Sony IMX500 معالجة الذكاء الاصطناعي مباشرة على مستشعر الصورة، مما يقلل من نقل البيانات والكمون. في هذه الحالات، يصبح توافق النموذج ودعم التصدير مهماً بشكل خاص، حيث يجب تحويل النموذج إلى تنسيق تدعمه سلسلة أدوات المستشعر.
على سبيل المثال، تدعم حزمة Ultralytics Python تصدير نماذج مثل Ultralytics YOLO11 إلى تنسيقات متوافقة مع خطوط أنابيب نشر الحافة، بما في ذلك المنصات المبنية حول أجهزة مثل Sony IMX500.
Link to this sectionالموثوقية الحرارية والبيئية#
عندما تقوم أجهزة الحافة بمعالجة البيانات البصرية بشكل مستمر، تصبح الموثوقية الحرارية والبيئية عوامل حاسمة. في هذا السياق، تعني الموثوقية أن الجهاز يمكن أن يعمل لفترات طويلة دون ارتفاع درجة الحرارة أو الفشل، حتى في الظروف القاسية مثل الغبار أو الاهتزاز أو درجات الحرارة المتطرفة.
مع نمو أحمال عمل ذكاء الحافة لتصبح أكثر تطلباً، أصبحت الكفاءة الحرارية عاملاً محدداً في تصميم النظام. تم تسليط الضوء على هذا التركيز على الأداء الحراري في معرض CES 2026 في لاس فيغاس، حيث قامت DeepX بتشغيل أحمال عمل ذكاء اصطناعي متطابقة على رقائق متعددة مع وضع قطعة صغيرة من الزبدة في الأعلى.
بينما ولدت الرقائق المنافسة حرارة كافية لإذابة الزبدة، لم يفعل جهاز حافة DeepX ذلك، مما يوضح كيف يمكن أن يؤثر استهلاك الطاقة المنخفض والاستقرار الحراري الأقوى بشكل مباشر على الموثوقية في العالم الحقيقي.
يلعب تصميم التبريد دوراً مركزياً في الحفاظ على أداء مستقر. فبينما تعمل المعالجات بجهد أكبر، فإنها تولد حرارة، ويجب إدارة تلك الحرارة بفعالية.
في العديد من الإعدادات الصناعية، يفضل التبريد السلبي لأن المراوح الميكانيكية يمكن أن تتآكل أو تفشل بمرور الوقت، خاصة في البيئات المتربة أو ذات الاهتزاز العالي. تُستخدم مشتتات الحرارة المصنوعة من الألومنيوم الخالية من المراوح بشكل شائع لتبديد الحرارة دون الاعتماد على الأجزاء المتحركة، مما يحسن المتانة طويلة الأمد.
يمكن أن يكون للظروف البيئية تأثير أيضاً. لكل جهاز نطاق درجة حرارة تشغيل مصنف، ويمكن أن تؤدي عمليات النشر في خزائن محكمة الإغلاق أو مواقع خارجية إلى حبس الحرارة أو تعريض الأجهزة لدرجات حرارة متقلبة. في هذه الحالات، يصبح تصميم الحاوية وتدفق الهواء لا يقل أهمية عن أداء الحوسبة الخام.
Link to this sectionالنظام البيئي للبرمجيات وجاهزية النشر#
عند اختيار جهاز الحافة المناسب، تعد قوة نظام البرمجيات الخاص به لا تقل أهمية عن مواصفات أجهزته. قد يوفر الجهاز أداء حوسبة قوياً على الورق، ولكن بدون أدوات ودعم منصة موثوقين، يمكن أن يصبح الانتقال من النموذج الأولي إلى الإنتاج بطيئاً ومعقداً.
تعمل المنصة المدعومة جيداً على تبسيط مسار النشر بأكمله، بدءاً من إعداد النموذج وحتى الاستدلال المحسن على الأجهزة المستهدفة. تجعل الأنظمة البيئية التي توفر أدوات مدمجة للكمية (quantization)، وضبط الأداء، وتصحيح الأخطاء من السهل التحقق من صحة النماذج تحت أحمال عمل حقيقية وتقليل المشكلات غير المتوقعة أثناء الطرح.
على سبيل المثال، يمكن تصدير نماذج Ultralytics YOLO مثل YOLO26 مباشرة إلى تنسيق OpenVINO، مما يتيح استدلالاً محسناً على معالجات Intel، ووحدات معالجة الرسومات المدمجة، ووحدات المعالجة العصبية (NPUs). يوفر OpenVINO تحسينات للأداء مثل تحويل النموذج، والكمية (بما في ذلك FP16 و INT8)، والتنفيذ غير المتجانس عبر أجهزة Intel المدعومة.
باستخدام حزمة Ultralytics Python، يمكن للفرق تصدير النماذج بأمر بسيط وتشغيل الاستدلال إما من خلال واجهة Ultralytics عالية المستوى أو مباشرة باستخدام OpenVINO Runtime الأصلي، مما يخلق سير عمل نشر مبسط وجاهز للإنتاج لأنظمة الحافة القائمة على Intel.
Link to this sectionالأداء الحقيقي تحت الحمل#
تبدو العديد من أجهزة الحافة مثيرة للإعجاب على الورق، ولكن الأداء يمكن أن يتغير بمجرد تشغيل خط أنابيب رؤية كامل. في عمليات النشر الحقيقية، لا يقوم النظام بتشغيل الاستدلال فقط.
بل يتعامل أيضاً مع المعالجة المسبقة، والمعالجة اللاحقة، وأحياناً تدفقات كاميرا متعددة في نفس الوقت. ولهذا السبب، من المهم النظر إلى ما هو أبعد من متوسط الإطارات في الثانية.
غالباً ما تكون الثبات في زمن الانتقال (latency) أهم من الأداء الأقصى. إن مراقبة اختناقات الذاكرة والتحقق من مدى استقرار النظام تحت حمل مستمر يعطي صورة أوضح عن أدائه في بيئة الإنتاج.
من المفيد اختبار وقت التشغيل البارد (cold-start)، والأداء العالي طويل المدى على مدار ساعات من التشغيل، وكيفية تصرف الجهاز عند تشغيل مهام أخرى إلى جانب الاستدلال (inference)، مثل التشفير أو التسجيل أو الشبكات. في معظم حالات الاستخدام الواقعية، يكون الأداء المستقر والمتوقع أكثر أهمية من طفرات السرعة العرضية.
Link to this sectionالأمان ودورة الحياة والإدارة بعد النشر#
تحتاج عمليات النشر على الحافة (Edge) إلى البقاء آمنة وموثوقة بمرور الوقت، خاصة في بيئات مثل التصنيع، حيث يتوقع تشغيل الأنظمة بشكل مستمر. تساعد ميزات مثل التمهيد الآمن (secure boot)، والتخزين المشفر، وتحديثات البائعين الدورية في حماية الأجهزة من العبث وتقليل مخاطر الثغرات الأمنية أو فترات التوقف غير المتوقعة.
إدارة الأجهزة بعد النشر لا تقل أهمية عن اختيار العتاد المناسب. تتيح إمكانات المراقبة والتحديث عن بُعد للفرق صيانة البرامج والبرامج الثابتة (firmware) والنماذج دون الحاجة إلى الوصول الفعلي إلى كل جهاز. يصبح هذا أمراً حيوياً بشكل متزايد مع انتقال المشاريع من تجربة أولية صغيرة إلى طرح أوسع.
مع نمو عمليات النشر، تساعد الإدارة المركزية للأسطول في الحفاظ على تنظيم كل شيء. فهي تسهل على الفرق تتبع حالة الجهاز، وإدارة التحديثات، ومراقبة الأداء، واستكشاف الأخطاء وإصلاحها عبر مواقع متعددة. وبدون استراتيجية إدارة واضحة، يمكن أن تصبح صيانة العشرات أو حتى المئات من أنظمة الحافة (edge) صعبة بسرعة.
Link to this sectionتطبيقات واقعية شائعة للرؤية الحاسوبية والذكاء الاصطناعي على الحافة (Edge AI)#
بينما تفكر في العوامل التي ينطوي عليها اختيار جهاز الحافة (edge) المناسب، قد تتساءل عن الأماكن التي تُستخدم فيها هذه الأنظمة فعلياً. اليوم، يشغل الذكاء الاصطناعي على الحافة تطبيقات عبر كل صناعة تقريباً، من التصنيع والتجزئة إلى الروبوتات والبنية التحتية الذكية.
إليك خمس حالات استخدام شائعة للتعلم العميق حيث تتيح أجهزة الحافة (edge) زمن انتقال منخفضاً، وتقليلاً في استهلاك النطاق الترددي، ومعالجة موثوقة على الجهاز:
- مراقبة السلامة في المواقع الصناعية: يمكن لخطوط أنابيب الرؤية الحاسوبية المنشورة على عتاد الحوسبة الطرفية (edge computing) توفير تنبيهات فورية للامتثال لمعدات الحماية الشخصية (PPE)، مما يعني أنها تكتشف تلقائياً ما إذا كان العمال يرتدون معدات السلامة المطلوبة مثل الخوذات، أو القفازات، أو سترات السلامة، أو النظارات الواقية، بالإضافة إلى تحديد السلوك غير الآمن. وهذا يحسن الموثوقية التشغيلية من خلال تقليل حوادث مكان العمل مع الحفاظ على معالجة بيانات الفيديو الحساسة بشكل آمن في الموقع.
- تحليلات التجزئة: يمكن لأجهزة الحافة (edge) معالجة البيانات المرئية محلياً لإدارة المخزون، وتوافر الرفوف، واكتشاف الطوابير، مما يقلل النطاق الترددي وتكاليف السحابة مع البقاء فعالاً من حيث التكلفة وقابلاً للتوسع عبر العديد من المتاجر.
- الروبوتات: في مجال الروبوتات، يُمكّن الذكاء الاصطناعي على الجهاز من اكتشاف الكائنات في الوقت الفعلي والتنقل الذاتي. على سبيل المثال، يمكن لأجهزة الحافة (edge) مثل NVIDIA Jetson توفير منصات حوسبة مدمجة ومعجلة بواسطة GPU تسمح للروبوتات بتشغيل نماذج الرؤية الحاسوبية مثل YOLO26 محلياً، مما يوفر أداءً منخفض زمن الانتقال مع الحفاظ على كفاءة الطاقة.
- المدن الذكية ومراقبة حركة المرور: يمكن لعمليات نشر المدن الذكية استخدام معالجات الرؤية الحاسوبية على الحافة (edge) لتحليل تدفق حركة المرور في الوقت الفعلي، واكتشاف الحوادث، ومراقبة سلامة المشاة. من خلال تجنب دفق الفيديو المستمر إلى السحابة، تقلل هذه الأنظمة من متطلبات النطاق الترددي وتحسن أوقات الاستجابة.
- فحص الجودة في التصنيع: على خطوط الإنتاج، يمكن لأجهزة الحافة (edge) فحص المنتجات في الوقت الفعلي لاكتشاف العيوب أو المكونات المفقودة أو أخطاء التجميع قبل انتقال العناصر إلى أبعد من ذلك على خط النقل. يمكن لهذه الأنظمة تشغيل نماذج مثل YOLO26 على وحدات المعالجة المركزية (CPUs) أو وحدات معالجة الرسومات (GPUs) أو مسرعات الذكاء الاصطناعي المخصصة، اعتماداً على الإنتاجية وقيود الطاقة.
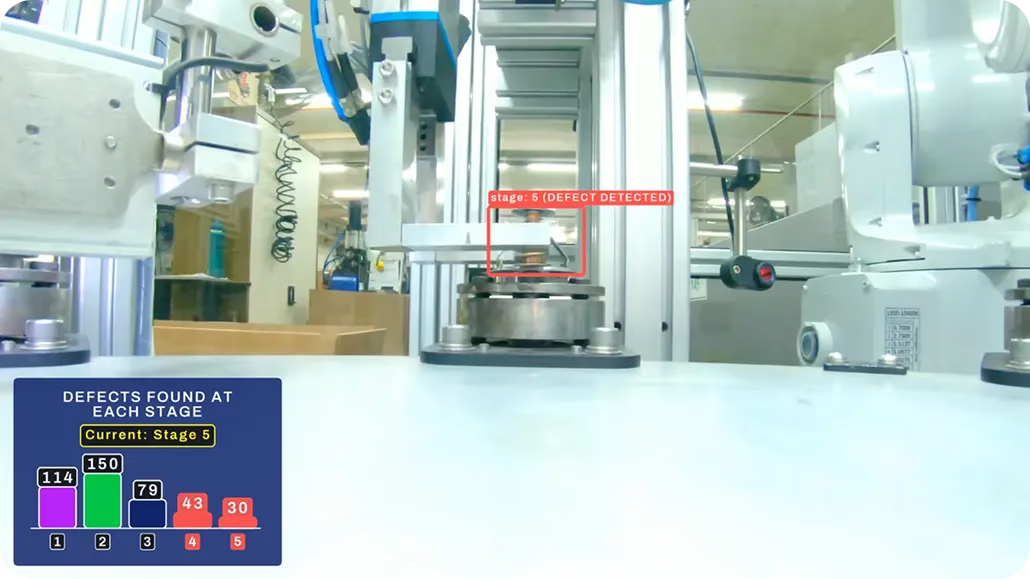
الشكل 4. يمكن نشر YOLO26 على الحافة (edge) لاكتشاف العيوب في مصانع التصنيع.
Link to this sectionأبرز النقاط#
يتضمن اختيار جهاز الحافة (edge) المناسب لمشروع الرؤية الحاسوبية الخاص بك تحقيق التوازن بين الأداء، وكفاءة الطاقة، والموثوقية، والتوافر طويل الأمد. بدلاً من التركيز فقط على المواصفات القصوى، يجب على الفرق تقييم الظروف الواقعية، ونضج النظام البيئي للبرمجيات، ودعم دورة الحياة. من خلال التحقق من إعدادك عبر نشر تجريبي قبل التوسع، يمكنك تقليل المخاطر، والتحكم في التكاليف، وضمان مسار أكثر سلاسة من النموذج الأولي إلى الإنتاج.
انضم إلى مجتمعنا واستكشف مستودع GitHub الخاص بنا. تفقّد صفحات حلولنا لاكتشاف تطبيقات متنوعة مثل الذكاء الاصطناعي في الزراعة والرؤية الحاسوبية في الرعاية الصحية. اكتشف خيارات الترخيص الخاصة بنا وابدأ في استخدام الذكاء الاصطناعي للرؤية اليوم!






