Explorando la visión artificial en aplicaciones de navegación
Mira cómo la visión artificial en las soluciones de navegación mejora el mapeo en tiempo real, el reconocimiento de objetos y la realidad aumentada para experiencias de viaje más inteligentes y seguras.

Hoy en día, sacar el móvil, escribir un destino y seguir las instrucciones paso a paso para llegar parece algo sencillo. Es algo que lleva solo unos segundos. Pero esta comodidad cotidiana es el resultado de años de progreso tecnológico. La navegación ha recorrido un largo camino, desde mapas de papel y brújulas hasta sistemas inteligentes capaces de entender y responder al mundo en tiempo real.
Una de las tecnologías detrás de este cambio es la visión artificial, una rama de la inteligencia artificial (IA) que permite a las máquinas interpretar información visual como lo hacen los humanos. Las herramientas de navegación de vanguardia utilizan ahora imágenes en tiempo real de satélites, cámaras de salpicadero y sensores a nivel de calle para mejorar la precisión de los mapas, controlar el estado de las carreteras y guiar a los usuarios a través de entornos complejos.
En este artículo, exploraremos cómo la visión artificial está mejorando la navegación mediante la optimización de mapas GPS, ofreciendo actualizaciones de tráfico en tiempo real y dando soporte a tecnologías como la navegación con realidad aumentada y los vehículos autónomos.
Link to this sectionSistemas de navegación con IA con cartografía 3D inmersiva#
Usar herramientas como Google Maps para navegar en la vida diaria se ha vuelto muy común, ya sea que te dirijas al otro lado de la ciudad o busques una cafetería cercana. A medida que las tecnologías de IA se adoptan de forma más generalizada, vemos funciones cada vez más avanzadas como Immersive View, presentada en 2023 por Google Maps, que permite a los usuarios previsualizar partes de su viaje en un entorno 3D. Esto es posible gracias a una combinación de IA, fotogrametría y visión artificial.
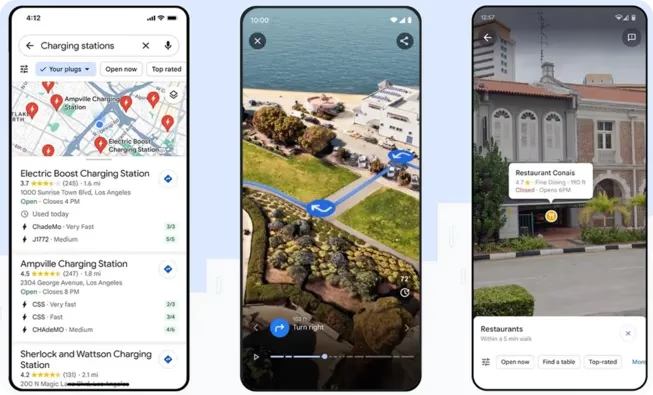
Fig 1. Immersive View de Google Maps.
Todo empieza con miles de millones de imágenes de alta resolución capturadas por una serie de equipos especializados. Esto incluye los coches de Street View, vehículos equipados con cámaras de 360 grados que recorren las ciudades, y los dispositivos Trekker, mochilas portátiles con cámaras montadas que se utilizan para capturar imágenes en lugares a los que no llegan los vehículos, como rutas de senderismo o callejones estrechos.
Estas imágenes se alinean con los datos cartográficos mediante fotogrametría, una técnica que une fotos en 2D tomadas desde diferentes ángulos para crear modelos 3D precisos de calles, edificios y terrenos.
A continuación, se utiliza visión artificial para analizar estos modelos mediante detección de objetos y segmentación de imágenes para identificar y etiquetar elementos importantes como señales de tráfico, aceras, pasos de peatones y entradas de edificios.

Fig 2. Immersive View utiliza la segmentación para segmentar objetos en una calle.
Los datos etiquetados se utilizan para entrenar sistemas de IA que reconocen cómo difieren las señales visuales entre regiones. Por ejemplo, el sistema puede distinguir fácilmente entre una señal de "SLOW" (despacio) en Estados Unidos, que suele ser un rombo amarillo o naranja, y una señal similar en Japón, que suele ser un triángulo rojo y blanco. Este nivel de comprensión hace que la experiencia de navegación sea más precisa y culturalmente consciente.
Por último, Immersive View superpone rutas de navegación en directo sobre el entorno 3D, ofreciendo una experiencia fluida e intuitiva que muestra exactamente hacia dónde te diriges.
Link to this sectionLa realidad aumentada en soluciones de navegación#
Probablemente todos hemos experimentado el dar vueltas en círculos tratando de averiguar en qué dirección nos está señalando Google Maps. Esa confusión es exactamente lo que la navegación con realidad aumentada (AR), una tecnología que superpone información digital sobre la vista de la cámara del mundo real, pretende resolver. Está cambiando la forma en que la gente se orienta en lugares concurridos como las calles de una ciudad o grandes espacios interiores.
Los mapas convencionales pueden ser difíciles de seguir, especialmente cuando las señales GPS son débiles o no funcionan bien. La navegación con AR soluciona esto mostrando indicaciones digitales, flechas y etiquetas directamente sobre la vista de la cámara del mundo real. Esto significa que los usuarios ven una guía que coincide con las calles y edificios que les rodean, lo que facilita mucho saber a dónde ir.
Link to this sectionCómo se utiliza la realidad aumentada en la navegación#
La navegación con AR se basa en modelos de visión artificial para entender el entorno a través de la cámara de un dispositivo. Esto implica varias tareas, como la localización de imágenes, que detecta características como los bordes de los edificios o las señales de tráfico y las hace coincidir con un mapa almacenado. La localización y cartografía simultáneas (SLAM) crean un mapa del entorno mientras rastrean la posición del dispositivo en tiempo real.
Por ejemplo, el Aeropuerto de Zúrich fue el primero en implementar Live View de Google Maps para la navegación en interiores. Los pasajeros pueden usar las cámaras de sus teléfonos para ver flechas e indicaciones superpuestas en el entorno real, guiándoles a través de las terminales hasta las puertas de embarque, tiendas y servicios. Esto mejora la experiencia del pasajero al facilitar la navegación en espacios interiores complicados.

Fig 3. El Aeropuerto de Zúrich utiliza visión artificial y AR para guiar a los pasajeros en interiores.
Link to this sectionMejorar la seguridad vial con sistemas de navegación por IA#
Las calles de las ciudades están cada vez más concurridas. Con más coches en la carretera, aceras abarrotadas y una actividad constante, mantener el tráfico fluido y seguro es un desafío cada vez mayor. Para ayudar a gestionar el caos, muchas ciudades están recurriendo a la IA y a la visión artificial.
Las cámaras inteligentes y los sensores instalados en intersecciones y a lo largo de las carreteras capturan un flujo constante de datos visuales. Ese metraje se procesa en tiempo real para detectar accidentes, controlar el flujo del tráfico, localizar baches y detectar infracciones como el aparcamiento ilegal o el comportamiento imprudente de los peatones.
Un ejemplo interesante es la Smart Airport Expressway en Hangzhou, China. Esta autopista de 20 kilómetros, que conecta el centro de Hangzhou con el Aeropuerto Internacional de Xiaoshan, ha sido equipada con cámaras de alta resolución y radares de ondas milimétricas. Estos dispositivos recopilan continuamente datos de vídeo y sensores, que luego se analizan mediante visión artificial.
Más que grabar metraje, el sistema interpreta lo que ocurre en la carretera. Los algoritmos de visión artificial detectan colisiones de vehículos, reconocen infracciones de tráfico e incluso identifican peatones o movimientos inusuales cerca de las salidas de la autopista. Esto permite a los responsables de tráfico responder a los incidentes en cuestión de segundos, sin necesidad de estar físicamente en el lugar.
Los datos también alimentan un gemelo digital: un modelo virtual 3D en vivo de la autopista que muestra las condiciones del tráfico en tiempo real, detalles de los vehículos y la congestión emergente. Los agentes de tráfico supervisan esta interfaz visual para gestionar el flujo, emitir alertas inteligentes y responder a los incidentes de forma rápida y precisa.
Link to this sectionMovilidad autónoma habilitada por la visión artificial en la navegación#
La navegación hoy en día va mucho más allá de simplemente ir del punto A al punto B. Ahora es una parte fundamental de los sistemas inteligentes que mueven personas, gestionan mercancías y toman decisiones en tiempo real, ya sea en la carretera o dentro de almacenes.
En el núcleo de muchos de estos sistemas se encuentra la visión artificial, que permite a las máquinas interpretar datos visuales y responder al instante a su entorno. Veamos algunos ejemplos para entender cómo esta tecnología está transformando la navegación en diferentes entornos.
Link to this sectionRobots de almacén navegando con visión artificial#
Los robots se están volviendo esenciales para el futuro de la logística, especialmente en las operaciones de almacén a gran escala. A medida que crece la demanda del comercio electrónico, las empresas confían cada vez más en máquinas dotadas de visión artificial para navegar por entornos complejos, clasificar artículos y gestionar el inventario con rapidez y precisión.
Tomemos, por ejemplo, los centros logísticos de Amazon, donde más de 750,000 robots trabajan junto a humanos para mantener las operaciones funcionando con eficiencia. Estos robots dependen en gran medida de la visión artificial para navegar por las concurridas plantas de los almacenes, identificar artículos y tomar decisiones rápidas y precisas.
Uno de estos sistemas es Sequoia, una plataforma robótica diseñada para acelerar la gestión de inventario. Utiliza visión artificial avanzada para escanear, contar y organizar los productos entrantes, ayudando a optimizar los procesos de almacenamiento y recuperación.
Del mismo modo, Vulcan, un brazo robótico, utiliza cámaras y análisis de imágenes para recoger artículos de forma segura de las estanterías, ajustando su agarre en función de la forma y posición de cada objeto e incluso reconociendo cuándo se necesita ayuda humana. Mientras tanto, Cardinal, otro robot con visión, se especializa en la clasificación: escanea montones mixtos de paquetes y los coloca con precisión en los carros de salida correctos.

Fig 4. Cardinal levantando paquetes con precisión de un montón.
Link to this sectionVisión artificial en la navegación de vehículos autónomos#
Hasta ahora, hemos visto cómo la visión artificial ayuda tanto a personas como a robots a navegar por sus entornos. Pero es igual de crucial para los sistemas autónomos, como los coches autónomos, donde la navegación depende totalmente de lo que el vehículo puede ver y entender en tiempo real.
Un buen ejemplo es el sistema Tesla Vision. Tesla ha adoptado un enfoque de solo cámaras para la conducción autónoma, eliminando el radar y otros sensores en favor de una red de cámaras que proporcionan una visión completa de 360 grados del entorno del vehículo. Estas cámaras envían datos visuales al ordenador de conducción autónoma (FSD), que utiliza redes neuronales profundas para interpretar el entorno y tomar decisiones de conducción en fracciones de segundo.
En función de lo que ve, el sistema decide cuándo girar, acelerar, frenar o cambiar de carril, igual que haría un conductor humano, pero totalmente a través de entradas visuales. Tesla mejora continuamente este sistema recopilando y aprendiendo de enormes cantidades de datos de conducción del mundo real en toda su flota.

Fig 5. Tesla utiliza visión artificial para una navegación segura y autónoma (Fuente: Tesla).
Link to this sectionPros y contras de la visión artificial en la navegación#
Aquí tienes algunas ventajas clave de utilizar la visión artificial en la navegación, especialmente en sistemas donde la precisión, la seguridad y la toma de decisiones en tiempo real son esenciales:
- Reduce el consumo de combustible: Al ayudar a los conductores a evitar el tráfico y las rutas con paradas constantes, la visión artificial puede reducir el consumo general de combustible y el tiempo de viaje, haciendo que los desplazamientos diarios sean más eficientes.
- Detecta el desgaste de la carretera y los problemas de infraestructura: Las soluciones basadas en visión pueden buscar baches, marcas de carril descoloridas, señales rotas e infraestructura dañada, proporcionando a los equipos de mantenimiento datos fiables y en tiempo real.
- Se integra perfectamente con otras herramientas de IA: La visión artificial puede combinarse con asistentes de voz, modelos de predicción de comportamiento o algoritmos de optimización de rutas para crear una experiencia de navegación altamente inteligente y personalizada.
Aunque la visión artificial aporta muchos beneficios a la navegación, también conlleva algunas limitaciones importantes que hay que tener en cuenta al implementar estas soluciones. Aquí tienes algunos desafíos clave:
- Falta de generalización: Los modelos entrenados en entornos o escenarios específicos a menudo tienen dificultades cuando se implementan en contextos nuevos o cambiantes sin un reentrenamiento.
- Limitaciones de iluminación: Los sistemas de visión dependen de una buena iluminación y un tiempo despejado para funcionar bien. Con niebla, lluvia intensa u oscuridad, su rendimiento cae a menos que se combinen con sensores como LiDAR o radar.
- Riesgos de privacidad: Los sistemas de navegación que utilizan cámaras pueden capturar a personas y propiedades privadas sin consentimiento. Esto plantea problemas de privacidad que deben abordarse cuidadosamente durante el desarrollo y la implementación.
Link to this sectionConclusiones clave#
La visión artificial está reinventando la navegación al hacer que los mapas sean más dinámicos, los sistemas de tráfico más inteligentes y la movilidad más accesible. Lo que antes eran rutas estáticas son ahora experiencias interactivas en tiempo real, impulsadas por previsualizaciones 3D inmersivas, indicaciones guiadas por AR y tecnologías de transporte autónomo.
A medida que la tecnología avanza, es probable que el enfoque se desplace hacia hacer que estos sistemas sean más inclusivos, adaptables y responsables. El progreso continuado dependerá de mejorar la precisión en diversos entornos, mantener un rendimiento fiable y proteger la privacidad del usuario. El futuro de la visión artificial en la navegación reside en la creación de soluciones que no solo sean inteligentes, sino también consideradas en su diseño e impacto.
¡Únete a nuestra creciente comunidad! Explora nuestro repositorio de GitHub para aprender sobre IA y consulta nuestras opciones de licencia para comenzar tus proyectos de IA de visión. ¿Te interesan innovaciones como la IA en el comercio minorista y la visión artificial en la agricultura? ¡Visita nuestras páginas de soluciones para descubrir más!






