Detección de tráfico por vídeo durante la noche: un vistazo a por qué la precisión es clave
Desde la mala visibilidad hasta el deslumbramiento, aprende qué hace que la precisión en la detección de tráfico nocturno por vídeo sea un desafío y cómo la visión artificial mejora la seguridad y la fluidez.

Las carreteras se ven distintas en la oscuridad, no solo para los conductores, sino también para los sistemas responsables de mantener la seguridad en ellas. La baja visibilidad, el resplandor de los faros y los reflejos rápidos pueden hacer que la detección de vehículos durante la noche sea más compleja.
Los métodos tradicionales, como la observación manual o las cámaras basadas en movimiento, dependen principalmente del juicio humano y de señales de movimiento simples. Esto puede resultar poco fiable en condiciones de poca luz o de tráfico complejo. Estos métodos pueden identificar erróneamente vehículos o peatones, lo que genera detecciones falsas u observaciones perdidas.

Fig 1. Un ejemplo de una carretera mal iluminada de noche (Fuente)
La inteligencia artificial (IA), el aprendizaje profundo y la visión artificial pueden cerrar esta brecha automatizando la detección y el reconocimiento de vehículos. En particular, la visión artificial es una rama de la IA que permite a las máquinas ver e interpretar datos visuales. Cuando se trata de detección de tráfico por vídeo durante la noche, los modelos de IA de visión pueden ir más allá del brillo o el movimiento, aprendiendo a reconocer patrones complejos que mejoran la precisión.
Por ejemplo, modelos de visión artificial como Ultralytics YOLO26 y Ultralytics YOLO11 son conocidos por su velocidad y precisión. Pueden procesar datos de vídeo e imagen en tiempo real, detectando y clasificando múltiples objetos dentro de un fotograma y siguiéndolos a través de secuencias.
Estas capacidades se hacen posibles mediante diversas tareas de visión, como la detección de objetos y la segmentación de instancias, incluso cuando los faros, las sombras o los vehículos superpuestos dificultan la detección. Permiten al modelo identificar, clasificar y diferenciar objetos.
En este artículo, exploraremos los retos de la vigilancia del tráfico nocturno, veremos cómo la visión artificial los aborda y dónde se aplica la IA de visión en los sistemas de vigilancia del tráfico del mundo real. ¡Empecemos!
Link to this sectionRetos en la detección nocturna#
Antes de explorar cómo la visión artificial resuelve los desafíos de la detección de tráfico nocturno, veamos por qué detectar vehículos después del anochecer es tan difícil. Estos son algunos factores a considerar:
-
Baja visibilidad: La iluminación limitada y las malas condiciones de iluminación dificultan que las cámaras capturen imágenes nítidas y detalladas. Con una calidad de imagen reducida, los vehículos pueden mezclarse con el fondo o ser identificados erróneamente por completo.
-
Condiciones meteorológicas: La lluvia, la niebla, la calima o incluso el polvo pueden degradar aún más la calidad del vídeo. Estas condiciones hacen que sea más difícil para los sistemas de detección distinguir los vehículos de su entorno.
-
Faros y luces traseras: Los haces brillantes y los reflejos pueden abrumar a las cámaras. Esto puede generar detecciones falsas de vehículos, donde los puntos de luz se confunden con vehículos, lo que confunde a los algoritmos de detección y reduce la precisión.
-
Oclusión de vehículos: En condiciones de tráfico denso, los vehículos pueden quedar parcial o totalmente ocultos tras otros. La oclusión complica el seguimiento, el conteo y la clasificación de vehículos, especialmente cuando varios usuarios de la vía se solapan en un mismo fotograma.
Link to this sectionLa necesidad de conjuntos de datos de referencia y métricas nocturnas#
Los modelos de visión artificial se entrenan utilizando grandes colecciones de imágenes llamadas conjuntos de datos. Estos conjuntos de datos están cuidadosamente etiquetados con los objetos que contienen, como coches, camiones, peatones y bicicletas, y sirven como base para el entrenamiento. Al estudiar estos ejemplos etiquetados, el modelo aprende a reconocer patrones, lo que le permite identificar y detectar objetos en nuevas secuencias de vídeo.

Fig 2. Uso de la visión artificial para detectar vehículos y peatones en el tráfico (Fuente)
Durante el entrenamiento, el modelo extrae características de los datos y las utiliza para mejorar la precisión de la detección. Este proceso ayuda a reducir las detecciones fallidas y las falsas alarmas cuando el modelo se expone a escenas de tráfico del mundo real.
Sin embargo, crear conjuntos de datos o colecciones de datos para condiciones nocturnas es mucho más difícil. La baja calidad del vídeo hace que el etiquetado requiera mucho tiempo y sea propenso a errores. Además, eventos poco frecuentes pero importantes, como accidentes o comportamientos de conducción inusuales, pueden ser difíciles de capturar en entornos nocturnos. Esto resulta en un número limitado de ejemplos de entrenamiento de los cuales los modelos pueden aprender.
Para abordar este problema, los investigadores han desarrollado conjuntos de datos de referencia especializados. Un conjunto de datos de referencia es más que una simple colección de imágenes. Incluye etiquetas estandarizadas, protocolos de evaluación y métricas de rendimiento como la precisión, la exhaustividad (recall) y la precisión media promedio (mAP). Estas métricas permiten probar y comparar diferentes algoritmos en las mismas condiciones, asegurando una evaluación justa y coherente.
Por ejemplo, el conjunto de datos de referencia ExDark contiene 7363 imágenes con poca luz en 12 categorías de objetos (bicicleta, barco, botella, autobús, coche, gato, silla, taza, perro, motocicleta, personas, mesa). Cada imagen está anotada con cuadros delimitadores (bounding boxes), y el conjunto de datos se utiliza ampliamente en la investigación para evaluar la detección y clasificación de objetos con escasa iluminación.
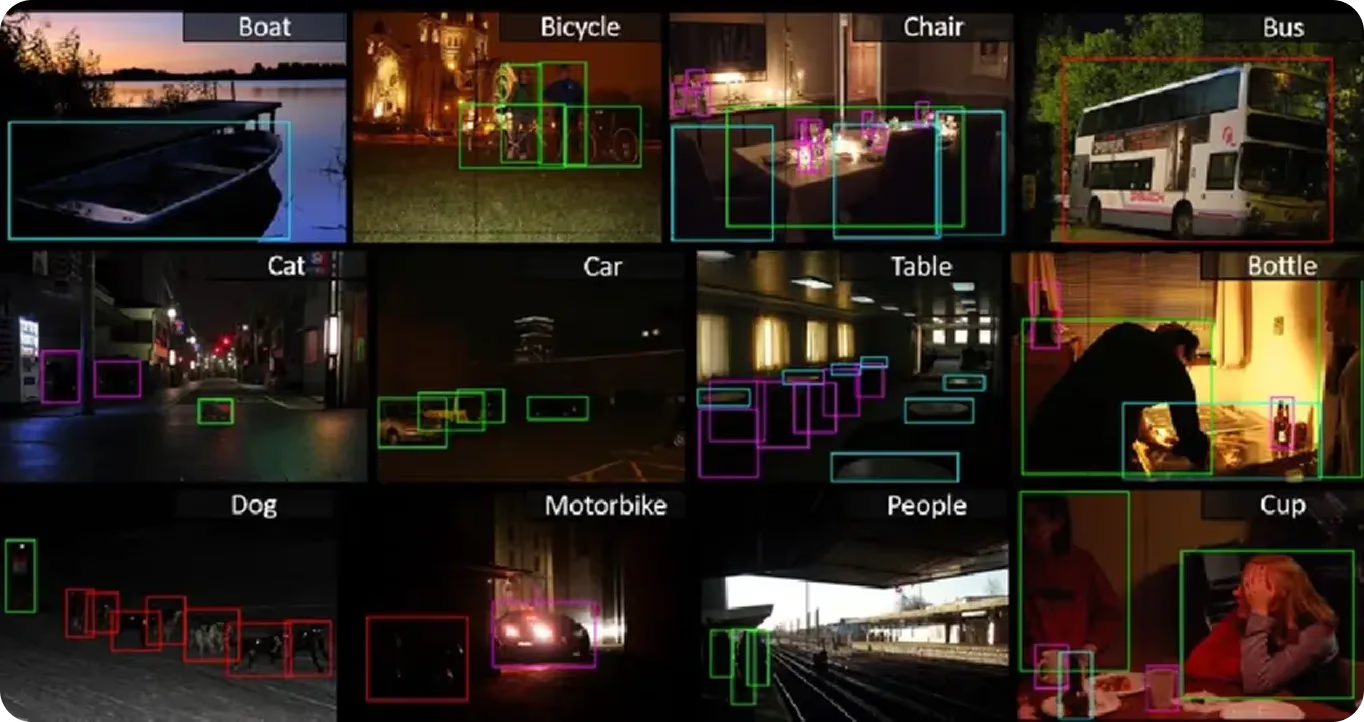
Fig 3. Un vistazo al conjunto de datos ExDark (Fuente)
De manera similar, el conjunto de datos de referencia NightOwls proporciona alrededor de 115 000 imágenes nocturnas con aproximadamente 279 000 anotaciones de peatones. Se ha convertido en un recurso clave para evaluar los sistemas de detección de peatones, los cuales desempeñan un papel vital en la seguridad vial y los sistemas avanzados de asistencia al conductor (ADAS).
Link to this sectionCómo ayuda la visión artificial en la detección de tráfico por vídeo nocturno#
Ahora que tenemos una mejor comprensión de los desafíos involucrados y la necesidad de conjuntos de datos, veamos más de cerca cómo los sistemas basados en visión pueden interpretar vídeos de tráfico nocturno.
Modelos como YOLO11 y YOLO26 admiten tareas de visión artificial como la detección de objetos, el seguimiento y la segmentación de instancias, que hacen posible analizar el tráfico incluso en condiciones de poca luz. Aquí tienes una descripción general de las tareas de IA de visión que estos modelos admiten para analizar el tráfico nocturno:
- Detección de objetos: Esta tarea se puede utilizar para identificar y localizar vehículos, peatones, bicicletas y otros usuarios de la vía en cada fotograma, normalmente dibujando cuadros delimitadores alrededor de ellos.
- Seguimiento de objetos: Ayuda a seguir los objetos detectados entre fotogramas, lo que permite reconocer al mismo vehículo o peatón a lo largo del tiempo, lo que hace posible estimar la velocidad del vehículo y controlar el flujo del tráfico.
- Segmentación de instancias: Puede distinguir objetos individuales incluso cuando se solapan, proporcionando detalles a nivel de píxel que mejoran la precisión en condiciones nocturnas complejas.
- Clasificación de imágenes: Esta tarea asigna una imagen completa o un objeto detectado a una categoría predefinida, como coche, autobús, camión o motocicleta.
- Detección de cuadros delimitadores orientados (OBB): Captura el ángulo y la orientación exactos de un objeto, mejorando la precisión cuando los vehículos aparecen en diagonal o en posiciones extrañas en el tráfico nocturno.
Link to this sectionUso de los modelos Ultralytics YOLO para vigilancia nocturna#
Hablamos sobre el entrenamiento de modelos, la necesidad de conjuntos de datos y las tareas que admiten modelos como YOLO11 y YOLO26. Pero para unirlo todo, hay un concepto más que repasar: cómo se aplican realmente estos modelos a la vigilancia nocturna.
De forma predeterminada, los modelos Ultralytics YOLO están disponibles como versiones preentrenadas, lo que significa que ya han sido entrenados en grandes conjuntos de datos de uso general, como el conjunto de datos COCO, que cubre muchos objetos cotidianos. Esto le da al modelo una sólida capacidad base para detectar y clasificar objetos.
Sin embargo, debido a que estos conjuntos de datos contienen muy pocos ejemplos con poca luz o nocturnos, los modelos preentrenados no son muy buenos para manejar el resplandor, las sombras o el bajo contraste de manera efectiva. Para que sean impactantes en la detección de tráfico por vídeo durante la noche, necesitan ser ajustados (fine-tuned) en conjuntos de datos especializados que reflejen las condiciones nocturnas del mundo real.
El ajuste fino o entrenamiento personalizado implica entrenar al modelo en imágenes etiquetadas adicionales capturadas en condiciones de poca luz, como vehículos bajo el resplandor de los faros, peatones en pasos de cebra o intersecciones concurridas de noche, de modo que aprenda las características únicas de las escenas nocturnas.
Una vez entrenado de forma personalizada, el modelo puede admitir tareas como detección, seguimiento, segmentación o clasificación con una precisión mucho mayor en condiciones de poca luz. Esto permite a las autoridades de tráfico aplicar dichos modelos para casos de uso prácticos como el conteo de vehículos, la estimación de velocidad, el control adaptativo de señales y la prevención de accidentes por la noche.
Link to this sectionAplicaciones de IA de visión para la detección de tráfico por vídeo durante la noche#
A continuación, veamos cómo se puede adoptar la visión artificial en los sistemas de tráfico nocturno del mundo real.
Link to this sectionLas señales de tráfico inteligentes pueden apoyar la planificación de ciudades inteligentes#
Las intersecciones urbanas son algunas de las áreas más difíciles de gestionar, especialmente de noche, cuando la visibilidad disminuye y el flujo de tráfico se vuelve menos predecible. Las señales tradicionales dependen de temporizadores fijos que no pueden responder a los cambios en tiempo real. La investigación muestra que esto no solo hace perder tiempo a los conductores, sino que también conduce a un consumo innecesario de combustible y retrasos.
Ahí es exactamente donde los sistemas de visión artificial pueden ayudar a superar este desafío. Estos sistemas pueden monitorear los movimientos de los vehículos y detectar la cantidad de vehículos en tiempo real. Los datos se envían luego a sistemas de control de tráfico adaptativo. Esto permite que las señales se ajusten rápidamente en respuesta a las condiciones reales de la carretera. Entonces, si un carril está congestionado mientras otro está vacío, el tiempo de la señal se puede ajustar al instante para eliminar cuellos de botella.
Link to this sectionPrevención de accidentes#
Conducir de noche es más arriesgado que durante el día porque la visibilidad reducida, la iluminación irregular y el resplandor hacen que sea más difícil para los conductores juzgar las distancias. De hecho, los estudios muestran que la tasa de accidentes mortales por kilómetro por la noche puede ser hasta tres veces mayor que durante el día.
Los métodos de vigilancia convencionales, como cámaras de vigilancia fijas, patrullas de carretera, sensores de presencia de vehículos y sistemas de señales de tiempo fijo, operan de forma reactiva y pueden no detectar situaciones peligrosas lo suficientemente pronto como para evitar que ocurran.
Las soluciones de visión artificial pueden manejar esta preocupación analizando transmisiones de vídeo en directo y detectando patrones inusuales en la carretera o autopista. Utilizando el seguimiento de objetos, estos sistemas pueden controlar el comportamiento de los vehículos en tiempo real y emitir alertas cuando algo parece anormal.
Por ejemplo, si un vehículo en movimiento está cambiando de carril, se mueve demasiado rápido en un área congestionada o reduce la velocidad de repente, el sistema puede marcarlo en tiempo real. Esto significa que las autoridades pueden responder rápidamente y prevenir accidentes antes de que sucedan.
Link to this sectionConducción autónoma y ADAS#
Para los vehículos autónomos y ADAS, la conducción nocturna conlleva sus propios desafíos. La baja visibilidad y los patrones de tráfico impredecibles hacen que sea más difícil para los sensores tradicionales funcionar de manera fiable, lo que genera preocupaciones de seguridad.
La visión artificial mejora estos sistemas al manejar tareas como la detección de objetos, el seguimiento de carriles y la segmentación, lo que permite a los vehículos reconocer peatones, otros coches y obstáculos incluso en condiciones de poca iluminación. Cuando se combina con radar o LiDAR (detección y alcance por luz), que mapean el entorno en 3D, la capa visual añadida ayuda a los ADAS a proporcionar advertencias tempranas y da a los vehículos autónomos la conciencia que necesitan para navegar de forma más segura por la noche.

Fig 4. Imágenes de vehículos capturadas tanto en condiciones diurnas como nocturnas (Fuente)
Link to this sectionCumplimiento de la ley y detección de infracciones#
El exceso de velocidad es responsable de una de cada tres muertes por tráfico en todo el mundo, y el riesgo solo empeora por la noche. La oscuridad hace que sea más difícil para la policía de tráfico detectar infracciones, ya que los detalles que son claros a la luz del día a menudo se ven borrosos después del anochecer.
Es por eso que infracciones como el exceso de velocidad en carreteras vacías, pasarse semáforos en rojo o desviarse al carril equivocado a menudo quedan impunes. La visión artificial aborda este problema utilizando cámaras infrarrojas para detectar infracciones incluso en condiciones de poca luz. Estos sistemas crean zonas de detección donde se registran los incidentes, reduciendo los falsos positivos y proporcionando pruebas claras y verificables. Para las autoridades de transporte, significa menos puntos ciegos y menos dependencia de las verificaciones manuales.
Link to this sectionPros y contras de la detección de tráfico por vídeo nocturno#
Aquí hay algunas ventajas de usar IA de visión para la detección de tráfico por vídeo durante la noche.
- Escalabilidad: Una vez ajustados, los modelos pueden desplegarse en muchas cámaras o intersecciones, lo que permite la vigilancia en toda la ciudad.
- Análisis predictivo: Los datos de vídeo históricos se pueden utilizar para pronosticar la congestión y las zonas propensas a accidentes, apoyando medidas preventivas.
- Optimización de recursos: Proporciona a las autoridades información en tiempo real que ayuda a asignar patrullas de carretera y servicios de emergencia de manera más eficiente.
A pesar de sus beneficios, la detección de tráfico nocturno mediante IA de visión también conlleva ciertas limitaciones. Estos son algunos factores a tener en cuenta:
-
Dependencia de los datos: La precisión de los sistemas de IA de visión depende en gran medida del acceso a conjuntos de datos de alta calidad grandes que capturen una amplia gama de condiciones nocturnas.
-
Desafíos ambientales: Factores meteorológicos como la lluvia, la niebla o la calima, así como problemas prácticos como lentes de cámara sucias o desalineadas, pueden reducir el rendimiento de la detección y requerir un mantenimiento regular.
-
Requisitos de hardware: Ejecutar modelos avanzados de IA a menudo exige GPU de alto rendimiento o dispositivos de borde (edge) especializados, lo que puede hacer que el despliegue a gran escala sea costoso y complejo.
Link to this sectionEl camino a seguir para los sistemas de transporte inteligente por la noche#
A medida que las ciudades crecen y las carreteras se vuelven más concurridas, la detección de tráfico nocturno avanza hacia sistemas más inteligentes y receptivos. Por ejemplo, las cámaras térmicas y los sensores infrarrojos pueden detectar firmas térmicas de personas y vehículos, lo que hace posible ver incluso en la oscuridad total. Esto reduce los errores que ocurren cuando las cámaras estándar luchan con el resplandor o la poca luz.

Fig 5. La tecnología de visión nocturna mejora la detección de peatones por la noche (Fuente)
Otro enfoque creciente es la fusión de cámara y LiDAR. Las cámaras proporcionan imágenes detalladas de la carretera, mientras que el LiDAR genera un mapa 3D preciso. Utilizados juntos, mejoran la precisión de la detección de carriles, vehículos y obstáculos, especialmente con poca luz o niebla moderada.
Al mismo tiempo, los avances en la mejora de imágenes con poca luz, el reconocimiento de peatones y la identificación de matrículas están ampliando las capacidades de la visión artificial. Con estas mejoras, incluso las carreteras e intersecciones mal iluminadas pueden ser vigiladas con mayor fiabilidad y menos errores.
Link to this sectionConclusiones clave#
Detectar vehículos por la noche siempre ha sido un reto para la vigilancia del tráfico, pero la visión artificial lo está haciendo más manejable. Al reducir el impacto del resplandor y manejar escenas de tráfico complejas, proporciona una imagen más precisa de cómo se comportan las carreteras después del anochecer. A medida que estos sistemas sigan avanzando, están allanando el camino para un transporte más seguro, inteligente y eficiente durante la noche.
¿Listo para integrar la IA de visión en tus proyectos? Únete a nuestra activa comunidad y descubre innovaciones como la IA en la industria automotriz y la IA de visión en robótica. Visita nuestro repositorio de GitHub para descubrir más. Para empezar con la visión artificial hoy mismo, consulta nuestras opciones de licencia.






