Por qué Ultralytics YOLO26 elimina el NMS y cómo eso cambia el despliegue
Descubre cómo Ultralytics YOLO26 permite una inferencia real de extremo a extremo sin NMS y por qué eliminar el post-procesamiento simplifica la exportación y el despliegue en el Edge.
El 14 de enero lanzamos Ultralytics YOLO26, la última generación de nuestros modelos de visión artificial. Con YOLO26, nuestro objetivo no era solo mejorar la precisión o la velocidad, sino replantear cómo se crean y despliegan los modelos de detección de objetos en sistemas del mundo real.
A medida que la visión artificial pasa de la investigación a la producción, se espera cada vez más que los modelos funcionen en CPU, dispositivos edge, cámaras, robots y hardware integrado. En estos entornos, la fiabilidad, la baja latencia y la facilidad de despliegue son tan importantes como el rendimiento.
YOLO26 se diseñó teniendo en cuenta esta realidad, utilizando una arquitectura integral optimizada que elimina la complejidad innecesaria del proceso de inferencia. Una de las innovaciones más importantes realizadas en YOLO26 es la eliminación de la Non-Maximum Suppression, comúnmente conocida como NMS.
Durante años, NMS ha sido una parte estándar de los sistemas de detección de objetos, utilizada como un paso de posprocesamiento para limpiar las detecciones duplicadas. Aunque es efectiva, también introdujo cálculos adicionales y desafíos de despliegue, especialmente en hardware edge.
Con YOLO26, adoptamos un enfoque diferente. Al replantear cómo se generan y entrenan las predicciones, permitimos una inferencia real de extremo a extremo sin NMS. El modelo produce detecciones finales directamente, sin depender de pasos de limpieza externos ni reglas diseñadas manualmente. Esto hace que YOLO26 sea más rápido, más fácil de exportar y más fiable de desplegar en una amplia gama de plataformas de hardware.
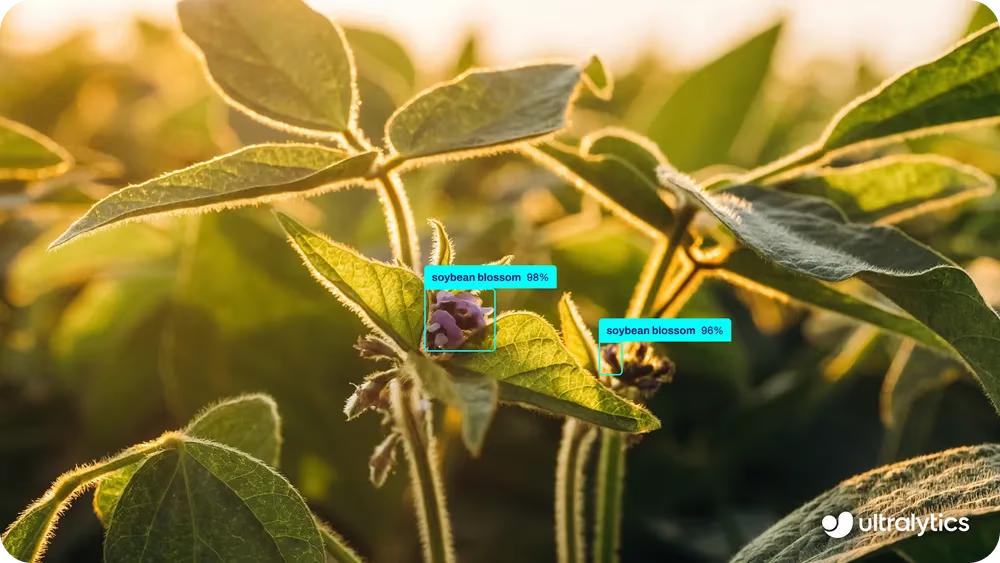
Fig 1. Detección de objetos en una imagen usando Ultralytics YOLO26.
En este artículo, analizaremos más de cerca por qué la detección de objetos tradicional dependía de NMS, cómo se convirtió en un cuello de botella para el despliegue y cómo YOLO26 elimina la necesidad de soluciones alternativas. ¡Empecemos!
Link to this sectionLa detección de objetos tradicional produce detecciones duplicadas#
Antes de profundizar en qué es NMS y por qué lo eliminamos en YOLO26, retrocedamos un paso y veamos cómo los modelos de detección de objetos tradicionales generan sus predicciones.
Los modelos tradicionales de detección de objetos a menudo producen múltiples cuadros delimitadores superpuestos para el mismo objeto. Cada uno de estos cuadros viene con su propia puntuación de confianza, aunque todos se refieren al mismo objeto en la imagen.
Esto sucede por varias razones. Primero, el modelo realiza predicciones en muchas ubicaciones espaciales y a diferentes escalas al mismo tiempo. Esto ayuda al modelo a detectar objetos de diferentes tamaños, pero también significa que las ubicaciones cercanas pueden identificar el mismo objeto de forma independiente.
Segundo, muchos sistemas de detección de objetos utilizan enfoques basados en anclas (anchors), que generan un gran número de cuadros candidatos alrededor de cada ubicación. Si bien esto mejora la posibilidad de encontrar objetos con precisión, también aumenta el número de predicciones superpuestas.
Finalmente, la detección basada en rejillas (grid) conduce naturalmente a la redundancia. Cuando un objeto se sitúa cerca del límite de múltiples celdas de la rejilla, varias celdas pueden predecir un cuadro para ese objeto, lo que da lugar a múltiples detecciones superpuestas.
Debido a esto, la salida bruta del modelo a menudo contiene varios cuadros para un solo objeto. Para que los resultados sean utilizables, estas predicciones redundantes deben filtrarse para que solo quede una detección final.
Link to this sectionComprender la Non-Maximum Suppression#
Una vez que un modelo de detección de objetos produce múltiples cuadros delimitadores superpuestos para el mismo objeto, esos resultados deben limpiarse antes de que puedan usarse. Aquí es donde se aplica la Non-Maximum Suppression.
La Non-Maximum Suppression es un paso de posprocesamiento que se ejecuta después de que el modelo ha terminado de realizar sus predicciones. Su propósito es reducir las detecciones duplicadas para que cada objeto esté representado por un solo cuadro delimitador final.
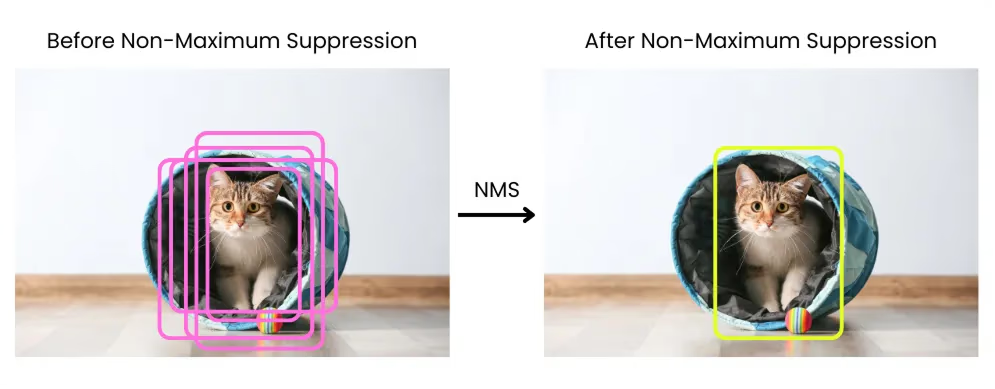
Fig 2. Una visión general de NMS. Imagen del autor.
El proceso funciona comparando los cuadros delimitadores en función de sus puntuaciones de confianza y cuánto se superponen. Las predicciones con una confianza muy baja se eliminan primero.
Los cuadros restantes se ordenan por confianza y el cuadro con la puntuación más alta se selecciona como la mejor detección. Ese cuadro seleccionado se compara con los otros cuadros.
Si otro cuadro se superpone demasiado con él, ese cuadro se suprime y se elimina. La superposición generalmente se mide utilizando la Intersection over Union, una métrica que calcula la relación entre el área compartida por dos cuadros y el área total cubierta por ambos. Este proceso se repite hasta que solo quedan las detecciones más seguras y sin superposiciones.
Link to this sectionPor qué NMS complica el despliegue#
Aunque la Non-Maximum Suppression ayuda a filtrar detecciones duplicadas, también introduce desafíos que se vuelven más visibles una vez que los modelos salen de la investigación y entran en el despliegue real.
Uno de los mayores problemas es el rendimiento. NMS se ejecuta después de la inferencia y requiere comparar cuadros delimitadores entre sí para decidir cuáles conservar.
Este proceso es computacionalmente costoso y difícil de paralelizar de manera eficiente. En dispositivos edge y sistemas basados en CPU, este trabajo adicional puede añadir una latencia notable, lo que dificulta el cumplimiento de los requisitos en tiempo real.
NMS también aumenta la complejidad del despliegue. Debido a que no es parte del modelo en sí, debe implementarse por separado como código de posprocesamiento.
Diferentes tiempos de ejecución y plataformas manejan NMS de formas distintas, lo que a menudo significa mantener implementaciones personalizadas para cada entorno objetivo. Lo que funciona en una configuración puede comportarse de forma ligeramente diferente en otra, lo que hace que el despliegue sea más frágil y más difícil de escalar.
La optimización del hardware es otro desafío. NMS no se asigna claramente a los aceleradores de IA especializados, que están diseñados para ejecutar operaciones de redes neuronales de forma eficiente. Como resultado, incluso cuando el modelo funciona rápidamente en hardware optimizado, NMS puede convertirse en un cuello de botella que limita el rendimiento general.
Además de estos factores, NMS depende de parámetros elegidos manualmente, como los umbrales de confianza y los umbrales de superposición. Estos ajustes pueden afectar significativamente a los resultados y a menudo deben ajustarse para diferentes conjuntos de datos, aplicaciones o hardware. Esto hace que el comportamiento sea menos predecible en los sistemas de producción y añade una sobrecarga de configuración adicional.
Link to this sectionExplicación de la inferencia de detección de objetos de extremo a extremo#
Las limitaciones de la Non-Maximum Suppression nos llevaron a replantear cómo deberían comportarse los modelos de detección de objetos en el momento de la inferencia. En lugar de generar muchas predicciones superpuestas y limpiarlas después, nos hicimos una pregunta más fundamental.
¿Qué pasaría si el modelo pudiera producir detecciones finales directamente? Esta pregunta está en el núcleo de la inferencia de detección de objetos de extremo a extremo (end-to-end). En un sistema de extremo a extremo, el modelo está entrenado para manejar todo el proceso de detección de principio a fin, sin depender de pasos de limpieza externos.
En lugar de producir muchos cuadros candidatos y filtrarlos después de la inferencia, el modelo aprende a generar por sí mismo un pequeño conjunto de predicciones seguras y sin superposiciones. Las detecciones duplicadas se resuelven dentro de la red en lugar de ser eliminadas por el posprocesamiento.
Las arquitecturas de modelos más recientes demostraron que este enfoque era posible y práctico. Con la estrategia de entrenamiento adecuada, los modelos podían aprender a asociar cada objeto con una sola predicción en lugar de muchas que compiten entre sí, reduciendo la redundancia en su origen.
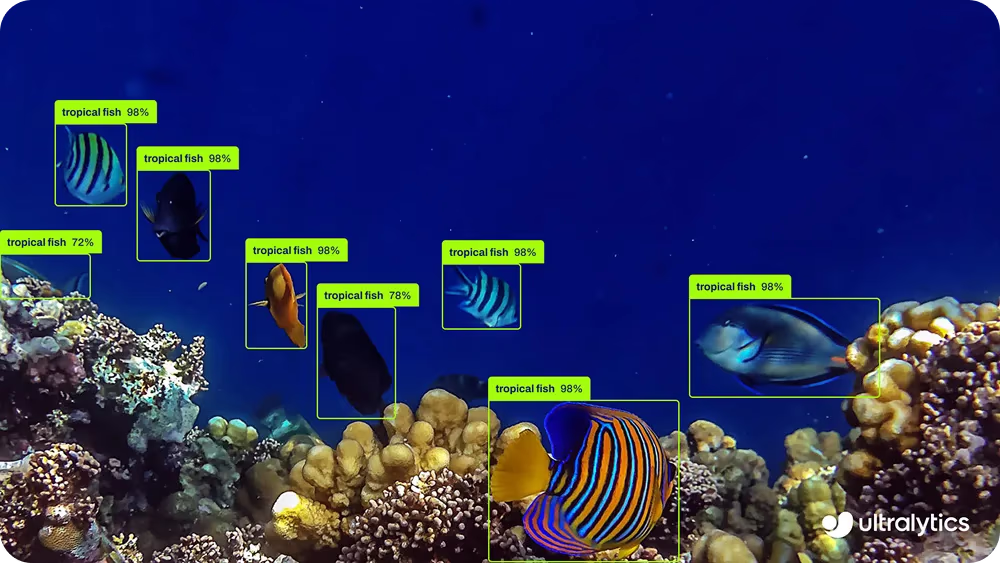
Fig 3. Un ejemplo de detección de objetos usando Ultralytics YOLO26.
Para que esto funcione, el entrenamiento también tiene que cambiar. En lugar de permitir que muchas predicciones compitan por el mismo objeto, el modelo aprende a tomar una decisión clara, produciendo menos detecciones y con mayor confianza.
El resultado general es una canalización de inferencia más sencilla. Como los duplicados ya se resuelven internamente, no hay necesidad de Non-Maximum Suppression en el momento de la inferencia. La salida del modelo es ya el conjunto final de detecciones.
Este diseño de extremo a extremo también facilita el despliegue. Sin pasos de posprocesamiento ni implementaciones de NMS específicas de la plataforma, el modelo exportado es totalmente autosuficiente y se comporta de manera consistente en diferentes marcos de inferencia y objetivos de hardware.
Como explica nuestro Ingeniero Principal de Asociaciones, Francesco Mattioli, “Un verdadero aprendizaje de extremo a extremo significa que el modelo debe manejar todo, desde los píxeles hasta las predicciones, sin pasos de posprocesamiento diseñados manualmente que rompan la diferenciabilidad y compliquen el despliegue”.
Link to this sectionCómo elimina NMS Ultralytics YOLO26#
YOLO26 elimina la Non-Maximum Suppression cambiando la forma en que se aprenden y producen las detecciones, en lugar de depender del posprocesamiento para limpiarlas. En lugar de permitir que muchas predicciones compitan por el mismo objeto, YOLO26 está entrenado para aprender una relación clara uno a uno entre objetos y salidas.
Esto es posible en parte gracias a la detección basada en consultas (queries) aprendibles, que ayuda al modelo a centrarse en producir una predicción única y segura para cada objeto en lugar de muchos candidatos superpuestos. Cada objeto se asocia con una predicción, lo que reduce naturalmente las detecciones duplicadas.
Este comportamiento se refuerza mediante estrategias de correspondencia consistentes durante el entrenamiento, lo que anima al modelo a tomar una decisión segura por objeto en lugar de generar predicciones superpuestas. En última instancia, el modelo produce menos predicciones, pero cada una representa una detección final.
Link to this sectionPor qué la eliminación de DFL hizo posible la detección sin NMS#
Otra innovación importante que permite la inferencia sin NMS en YOLO26 es la eliminación de Distribution Focal Loss, o DFL. En modelos YOLO anteriores, DFL se utilizaba para mejorar la regresión de los cuadros delimitadores prediciendo una distribución de las posibles ubicaciones de los cuadros en lugar de un solo valor.
Aunque este enfoque mejoró la precisión de la localización, también añadió complejidad a la canalización de detección. Esa complejidad se convirtió en una limitación a la hora de avanzar hacia una verdadera inferencia de extremo a extremo.
DFL introdujo cálculos adicionales y rangos de regresión fijos, lo que dificultó que el modelo aprendiera asignaciones de objetos limpias y uno a uno, y aumentó la dependencia de pasos de posprocesamiento como la Non-Maximum Suppression. Con YOLO26, eliminamos DFL y rediseñamos la regresión de cuadros delimitadores para que sea más sencilla y directa.
En lugar de depender de salidas basadas en la distribución, el modelo aprende a predecir coordenadas de cuadros precisas de una manera que admite menos detecciones y más seguras. Este cambio ayuda a reducir las predicciones superpuestas en su origen y alinea la regresión de cuadros delimitadores con el diseño de extremo a extremo y sin NMS de YOLO26.
Link to this sectionUltralytics YOLO26 no utiliza NMS y es fácil de desplegar#
Un diseño sin NMS convierte a YOLO26 en un modelo verdaderamente de extremo a extremo. Esto tiene un impacto importante en la exportación de modelos.
Exportar significa convertir un modelo entrenado en un formato que pueda ejecutarse fuera del entorno de entrenamiento, como ONNX, TensorRT, CoreML o OpenVINO. En las canalizaciones tradicionales, este proceso a menudo falla porque la Non-Maximum Suppression no es parte del modelo en sí.
Al eliminar NMS, YOLO26 evita este problema por completo. El modelo exportado ya incluye todo lo necesario para producir detecciones finales.
Esto hace que el modelo exportado sea totalmente autosuficiente y más portátil a través de marcos de inferencia y objetivos de hardware. El mismo modelo se comporta de manera consistente tanto si se despliega en servidores, sistemas solo de CPU, dispositivos integrados o aceleradores edge. El despliegue se vuelve más directo porque lo que exportas es exactamente lo que ejecutas.
Esta simplicidad es especialmente importante para las aplicaciones edge. Por ejemplo, YOLO26 puede desplegarse fácilmente en dispositivos como drones para casos de uso como la monitorización de cultivos, la inspección de campos y el análisis de la salud de las plantas, donde los presupuestos limitados de computación y energía hacen que las canalizaciones de posprocesamiento complejas sean poco prácticas. Debido a que el modelo genera detecciones finales directamente, funciona de manera fiable en hardware ligero sin pasos de procesamiento adicionales.

Fig 4. Ultralytics YOLO26 es fácil de desplegar en dispositivos edge como drones.
En resumen, la inferencia sin NMS elimina la fricción de la exportación y el despliegue, y permite sistemas de visión más limpios y fiables. NMS era una solución alternativa. YOLO26 ya no necesita soluciones alternativas.
Link to this sectionConclusiones clave#
YOLO26 elimina la Non-Maximum Suppression resolviendo el problema subyacente de las detecciones duplicadas, en lugar de limpiarlas después del hecho. Su diseño de extremo a extremo permite al modelo producir detecciones finales directamente, lo que hace que la exportación y el despliegue sean más sencillos y consistentes en diferentes hardwares. NMS fue una solución útil para sistemas anteriores, pero YOLO26 ya no la necesita.
Únete a nuestra comunidad y consulta nuestro repositorio de GitHub para aprender más sobre IA. Explora nuestras páginas de soluciones sobre IA en la agricultura y visión artificial en el comercio minorista. ¡Descubre nuestras opciones de licencia y empieza hoy mismo con la IA de visión!






