Explorer les différents types de données pour les applications d'IA de vision
Découvre comment les types de données visuelles tels que l'imagerie thermique, le LiDAR et les images infrarouges permettent diverses applications de vision par ordinateur dans tous les secteurs.

La technologie comme les drones était autrefois limitée et réservée aux chercheurs et spécialistes, mais aujourd'hui, le matériel de pointe devient accessible à un public plus large. Ce changement transforme notre manière de collecter des données visuelles. Grâce à une technologie plus accessible, nous pouvons désormais capturer des images et des vidéos à partir d'une variété de sources, au-delà des caméras traditionnelles.
En parallèle, l'analyse d'images, rendue possible par la vision par ordinateur, une branche de l'intelligence artificielle (IA), évolue rapidement, permettant aux machines d'interpréter et de traiter les données visuelles plus efficacement. Cette avancée a ouvert de nouvelles possibilités en matière d'automatisation, de détection d'objets et d'analyse en temps réel. Les machines peuvent désormais reconnaître des modèles, suivre des mouvements et donner un sens à des entrées visuelles complexes.
Certains types clés de données visuelles incluent les images RGB (Rouge, Vert, Bleu), couramment utilisées pour la reconnaissance d'objets, l'imagerie thermique, qui aide à détecter les signatures thermiques dans des conditions de faible luminosité, et les données de profondeur, qui permettent aux machines de comprendre les environnements 3D. Chacun de ces types de données joue un rôle essentiel dans l'alimentation de diverses applications d'IA visuelle, allant de la surveillance à l'imagerie médicale.
Dans cet article, nous explorerons les types clés de données visuelles utilisés dans l'IA visuelle et nous examinerons comment chacun contribue à améliorer la précision, l'efficacité et les performances dans diverses industries. Commençons !
Link to this sectionLe type de jeux de données d'images et de vidéos IA le plus courant#
Typiquement, quand tu utilises un smartphone pour prendre une photo ou visionner des images de vidéosurveillance, tu travailles avec des images RGB. RGB signifie rouge, vert et bleu, ce sont les trois canaux de couleur qui représentent l'information visuelle dans les images numériques.
Les images et vidéos RGB sont des types de données visuelles étroitement liés utilisés en vision par ordinateur, tous deux capturés à l'aide de caméras standard. La différence clé est que les images capturent un instant unique, tandis que les vidéos sont une séquence de frames qui montrent comment les choses changent au fil du temps.
Les images RGB sont généralement utilisées pour des tâches de vision par ordinateur comme la détection d'objets, la segmentation d'instance et l'estimation de pose, prises en charge par des modèles comme Ultralytics YOLO11. Ces applications reposent sur l'identification de modèles, de formes ou de caractéristiques spécifiques dans une seule frame.
Les vidéos, en revanche, sont essentielles lorsque le mouvement ou le temps est un facteur, comme pour la reconnaissance de gestes, la surveillance ou le suivi d'actions. Étant donné que les vidéos peuvent être considérées comme une série d'images, les modèles de vision par ordinateur comme YOLO11 les traitent frame par frame pour comprendre le mouvement et le comportement au fil du temps.
Par exemple, YOLO11 peut être utilisé pour analyser des images ou vidéos RGB afin de détecter les mauvaises herbes et compter les plantes dans les champs agricoles. Cela améliore le suivi des cultures et aide à suivre les changements au cours des cycles de croissance pour une gestion agricole plus efficace.

Fig 1. YOLO11 peut détecter et compter les plantes pour un suivi des cultures plus intelligent.
Link to this sectionDonnées de profondeur dans l'IA visuelle : LiDAR et perception 3D#
Les données de profondeur ajoutent une troisième dimension à l'information visuelle en indiquant à quelle distance se trouvent les objets de la caméra ou du capteur. Contrairement aux images RGB qui ne font que capturer la couleur et la texture, les données de profondeur fournissent un contexte spatial. Elles montrent la distance entre les objets et la caméra, permettant d'interpréter la disposition 3D d'une scène.
Ce type de données est capturé à l'aide de technologies comme le LiDAR, la vision stéréoscopique (utilisant deux caméras pour imiter la perception de la profondeur humaine) et les caméras à temps de vol (mesurant le temps nécessaire à la lumière pour voyager jusqu'à un objet et revenir).
Parmi celles-ci, le LiDAR (Light Detection and Ranging) est souvent le plus fiable pour la mesure de distance. Il fonctionne en envoyant des impulsions laser rapides et en mesurant le temps qu'elles mettent à revenir. Le résultat est une carte 3D très précise, appelée nuage de points, qui met en évidence la forme, la position et la distance des objets en temps réel.
Link to this sectionLe rôle croissant du LiDAR dans les systèmes d'IA visuelle#
La technologie LiDAR peut être divisée en deux types principaux, chacun conçu pour des applications et des environnements spécifiques. Voici un examen plus détaillé des deux types :
- LiDAR aéroporté : Typiquement utilisé pour cartographier de grandes zones, les scanners LiDAR aéroportés sont montés sur des drones ou des aéronefs pour capturer des données haute résolution pour la cartographie topographique à grande échelle. Il est idéal pour l'arpentage de terrains, de forêts et de paysages.
- LiDAR terrestre : Ce type de données LiDAR est collecté à partir de capteurs montés sur des véhicules ou des plateformes stationnaires pour des applications telles que la surveillance des infrastructures, la construction et la cartographie intérieure. Il fournit des données très détaillées pour des zones plus petites et localisées, ce qui le rend utile pour des tâches comme l'urbanisme et l'arpentage de structures spécifiques.
Une application marquante des données LiDAR se trouve dans les véhicules autonomes, où il joue un rôle clé dans des tâches telles que la détection de voie, l'évitement de collision et l'identification des objets à proximité. Le LiDAR génère des cartes 3D détaillées en temps réel de l'environnement, permettant au véhicule de voir les objets, de calculer leur distance et de naviguer en toute sécurité.
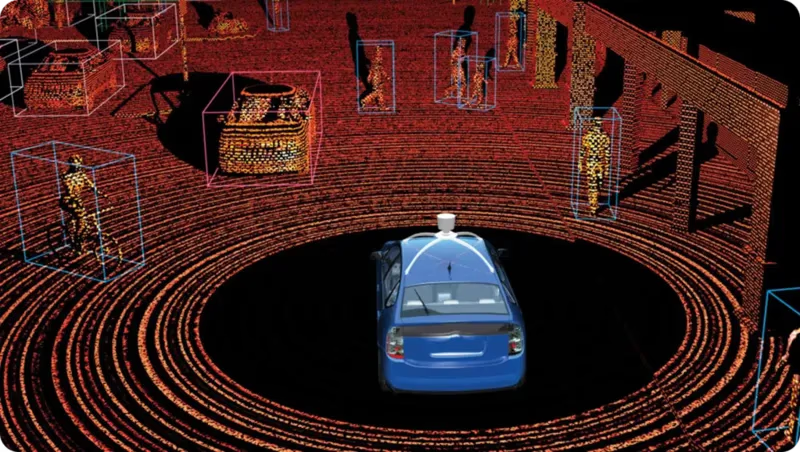
Fig 2. La technologie LiDAR permet aux véhicules autonomes de cartographier la profondeur et de détecter des objets.
Link to this sectionUtiliser des données thermiques et infrarouges dans les applications d'IA#
Les images RGB capturent ce que nous voyons dans le spectre de lumière visible ; cependant, d'autres technologies d'imagerie, comme l'imagerie thermique et infrarouge, vont au-delà. L'imagerie infrarouge capture la lumière infrarouge émise ou réfléchie par les objets, ce qui la rend utile dans des conditions de faible luminosité.
L'imagerie thermique, en revanche, détecte la chaleur émise par les objets et montre les différences de température, lui permettant de fonctionner dans l'obscurité totale ou à travers la fumée, le brouillard et d'autres obstructions. Ce type de données est particulièrement utile pour la surveillance et la détection de problèmes, surtout dans les industries où les changements de température peuvent signaler des problèmes potentiels.
Un exemple intéressant est l'utilisation de l'imagerie thermique pour surveiller des composants électriques à la recherche de signes de surchauffe. En détectant les différences de température, les caméras thermiques peuvent identifier les problèmes avant qu'ils n'entraînent une défaillance de l'équipement, des incendies ou des dommages coûteux.
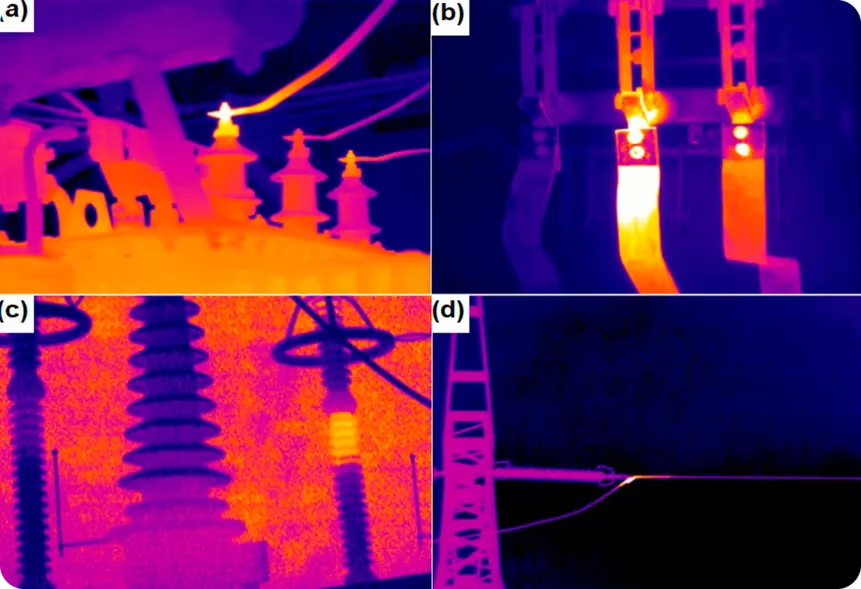
Fig 3. Un exemple d'imagerie thermique utilisée pour surveiller des composants électriques.
De même, les images infrarouges peuvent aider à détecter des fuites dans les pipelines ou l'isolation en identifiant les différences de température qui indiquent des gaz ou des fluides s'échappant, ce qui est crucial pour prévenir les situations dangereuses et améliorer l'efficacité énergétique.
Link to this sectionImagerie multispectrale et hyperspectrale dans l'IA#
Alors que l'imagerie infrarouge et thermique capture des aspects spécifiques du spectre électromagnétique, l'imagerie multispectrale collecte la lumière à partir de quelques plages de longueurs d'onde sélectionnées, chacune choisie dans un but spécifique, tel que la détection de la végétation saine ou l'identification de matériaux de surface.
L'imagerie hyperspectrale va encore plus loin en capturant la lumière sur des centaines de plages de longueurs d'onde très étroites et continues. Cela fournit une signature lumineuse détaillée pour chaque pixel de l'image, offrant une compréhension beaucoup plus profonde de tout matériau observé.
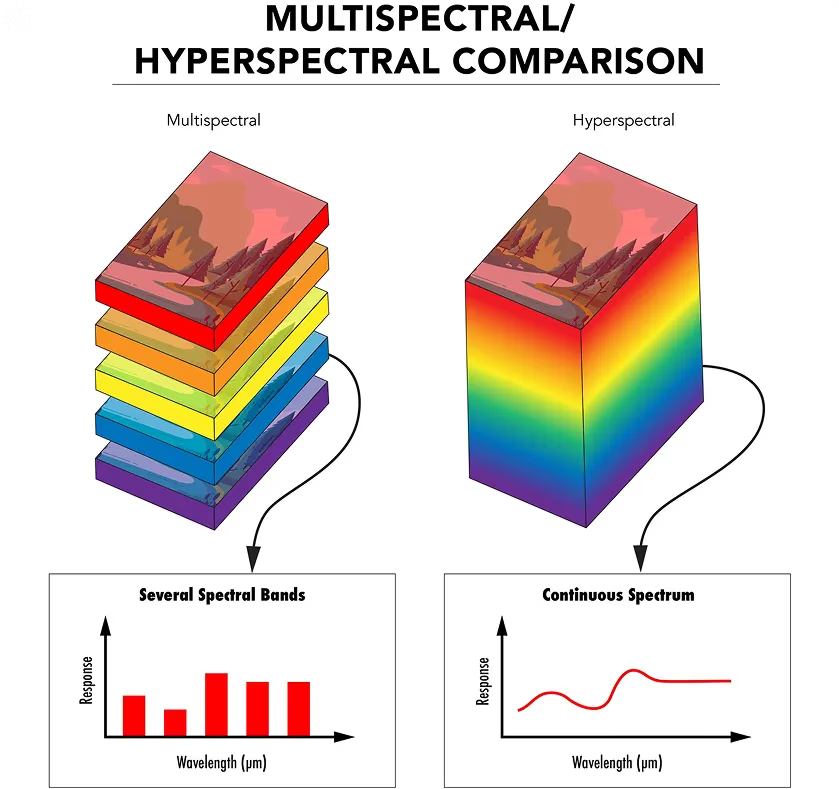
Fig 4. Comparaison de l'imagerie multispectrale et hyperspectrale.
L'imagerie multispectrale et hyperspectrale utilise des capteurs et des filtres spéciaux pour capturer la lumière à différentes longueurs d'onde. Les données sont ensuite organisées dans une structure 3D appelée cube spectral, chaque couche représentant une longueur d'onde différente.
Les modèles d'IA peuvent analyser ces données pour détecter des caractéristiques que les caméras ordinaires ou l'œil humain ne peuvent pas voir. Par exemple, dans le phénotypage des plantes, l'imagerie hyperspectrale peut être utilisée pour surveiller la santé et la croissance des plantes en détectant des changements subtils dans leurs feuilles ou tiges, tels que des carences en nutriments ou du stress. Cela aide les chercheurs à évaluer la santé des plantes et à optimiser les pratiques agricoles sans avoir besoin de méthodes invasives.
Link to this sectionAnalyser l'imagerie radar et sonar à l'aide de l'IA#
L'imagerie radar et sonar sont des technologies qui détectent et cartographient les objets en envoyant des signaux et en analysant leurs réflexions, de manière similaire au LiDAR. Contrairement à l'imagerie RGB, qui repose sur des ondes lumineuses pour capturer des informations visuelles, le radar utilise des ondes électromagnétiques, typiquement des ondes radio, tandis que le sonar utilise des ondes sonores. Les systèmes radar et sonar émettent tous deux des impulsions et mesurent le temps nécessaire au signal pour rebondir sur un objet, fournissant des informations sur sa distance, sa taille et sa vitesse.
L'imagerie radar est particulièrement utile lorsque la visibilité est mauvaise, comme pendant le brouillard, la pluie ou la nuit. Parce qu'elle ne repose pas sur la lumière, elle peut détecter des aéronefs, des véhicules ou le terrain dans l'obscurité totale. Cela fait du radar un choix fiable dans l'aviation, la surveillance météorologique et la navigation autonome.
En comparaison, l'imagerie sonar est couramment utilisée dans les environnements sous-marins où la lumière ne peut pas pénétrer. Elle utilise des ondes sonores qui se propagent dans l'eau et rebondissent sur les objets submergés, permettant la détection de sous-marins, la cartographie des fonds océaniques et l'exécution de missions de sauvetage sous-marines. Les avancées en vision par ordinateur permettent désormais une amélioration supplémentaire de la détection sous-marine en combinant les données sonar avec une analyse intelligente pour une meilleure détection et prise de décision.
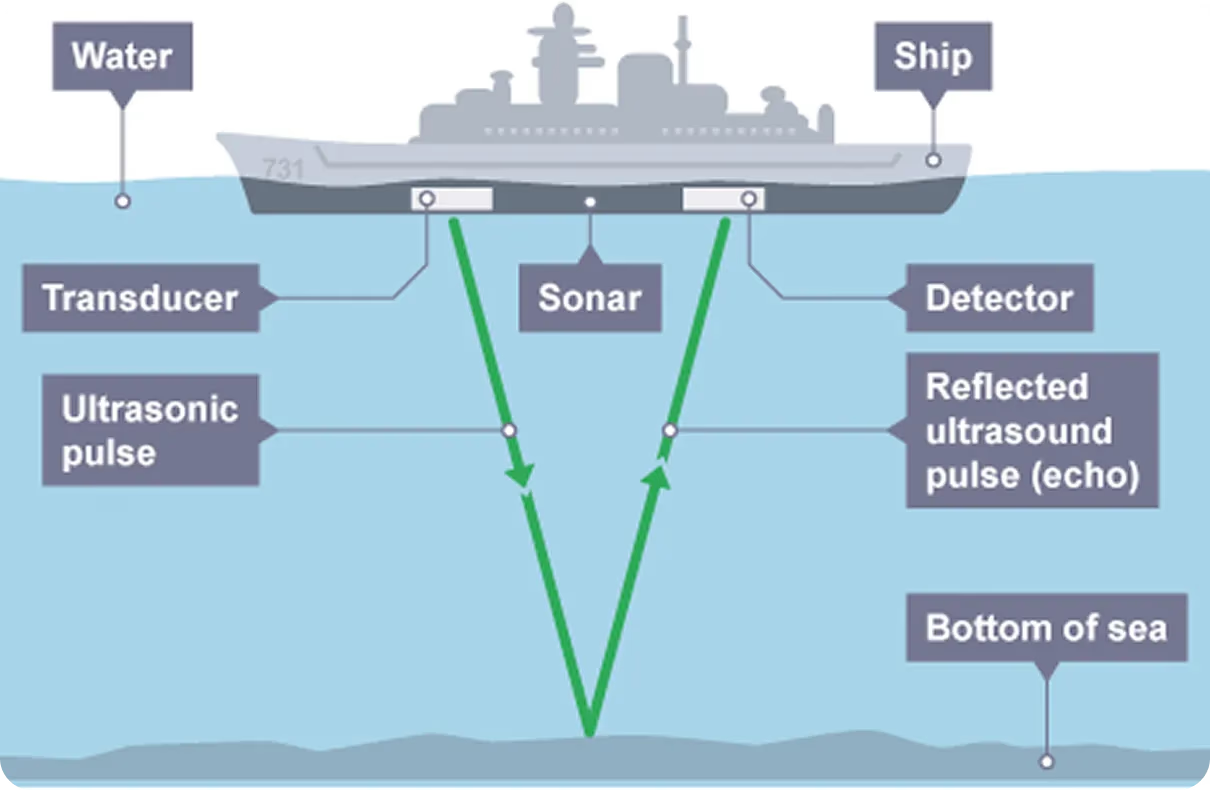
Fig 5. Comment un système SONAR utilise des impulsions ultrasoniques pour mesurer la profondeur de la mer.
Link to this sectionDonnées visuelles synthétiques et simulées pour l'entraînement des modèles d'IA#
Jusqu'à présent, les différents types de données dont nous avons discuté étaient ceux qui peuvent être collectés dans le monde réel. Cependant, les données visuelles synthétiques et simulées sont deux types de contenu artificiel. Les données synthétiques sont générées de toutes pièces à l'aide de la modélisation 3D ou de l'IA générative pour produire des images ou des vidéos d'apparence réaliste.

Fig 6. Un aperçu des images générées synthétiquement.
Les données simulées sont similaires mais impliquent la création d'environnements virtuels qui reproduisent le comportement du monde physique, y compris la réflexion de la lumière, la formation d'ombres et le mouvement des objets. Bien que toutes les données visuelles simulées soient synthétiques, toutes les données synthétiques ne sont pas simulées. La différence clé est que les données simulées reproduisent un comportement réaliste, pas seulement une apparence.
Ces types de données sont utiles pour entraîner des modèles de vision par ordinateur, en particulier lorsque les données du monde réel sont difficiles à collecter ou lorsque des situations spécifiques et rares doivent être simulées. Les développeurs peuvent créer des scènes entières, choisir des types d'objets, des positions et l'éclairage, et ajouter automatiquement des étiquettes comme des boîtes englobantes pour l'entraînement. Cela aide à construire rapidement des jeux de données vastes et diversifiés, sans avoir besoin de vraies photos ou d'étiquetage manuel, ce qui peut être coûteux et chronophage.
Par exemple, dans le domaine de la santé, les données synthétiques peuvent être utilisées pour entraîner des modèles à segmenter les cellules cancéreuses du sein, là où la collecte et l'étiquetage de grands jeux de données d'images réelles sont difficiles. Les données synthétiques et simulées offrent flexibilité et contrôle, comblant les lacunes là où les visuels du monde réel sont limités.
Link to this sectionChoisir le bon type de données visuelles pour ton application d'IA#
Maintenant que nous avons examiné comment fonctionnent les différents types de données visuelles et ce qu'ils peuvent faire, examinons de plus près quels types de données sont les meilleurs pour des tâches spécifiques :
- Images RGB : Elles sont parfaites pour les tâches générales de vision par ordinateur comme la classification d'images et la détection d'objets. Elles capturent la couleur et la texture mais sont limitées dans des conditions difficiles comme une faible luminosité ou une mauvaise visibilité.
- Imagerie LiDAR : Ce type d'imagerie offre une cartographie 3D de haute précision utilisant des impulsions laser. C'est idéal pour les applications qui nécessitent des mesures de distance précises, telles que la robotique, les véhicules autonomes et l'inspection des infrastructures.
- Imagerie thermique : Puisqu'elle peut détecter les différences de température, elle est utile dans les conditions de faible visibilité, comme la surveillance nocturne, la lutte contre les incendies ou la détection de fuites de chaleur dans les machines et les bâtiments.
- Imagerie multispectrale et hyperspectrale : Utile pour les tâches qui nécessitent une analyse détaillée des matériaux, telle que le suivi agricole, le contrôle qualité pharmaceutique ou la télédétection. Ces méthodes offrent des aperçus plus profonds en capturant des données sur une large gamme de longueurs d'onde au-delà de la lumière visible.
- Imagerie radar et sonar : Elles sont préférées dans les environnements à faible visibilité. Le radar utilise des ondes radio et est utile dans l'aviation et la navigation, tandis que le sonar utilise des ondes sonores pour fonctionner pour la détection sous-marine.
- Données visuelles synthétiques et simulées : Idéales pour l'entraînement de modèles d'IA lorsque les données du monde réel sont limitées, indisponibles ou difficiles à étiqueter. Ces visuels artificiels aident à construire des jeux de données diversifiés pour des scénarios complexes comme des événements rares ou des conditions critiques pour la sécurité.
Parfois, un seul type de données peut ne pas fournir assez de précision ou de contexte dans les situations du monde réel. C'est là que la fusion de capteurs multimodaux devient clé. En combinant le RGB avec d'autres types de données comme le thermique, la profondeur ou le LiDAR, les systèmes peuvent surmonter les limitations individuelles, améliorant la fiabilité et l'adaptabilité.
Par exemple, dans l'automatisation d'entrepôts, l'utilisation du RGB pour la reconnaissance d'objets, de la profondeur pour la mesure de distance et du thermique pour détecter la surchauffe des équipements rend les opérations plus efficaces et plus sûres. En fin de compte, les meilleurs résultats proviennent de la sélection ou de la combinaison de types de données en fonction des besoins spécifiques de ton application.
Link to this sectionPoints clés#
Lors de la construction de modèles d'IA visuelle, le choix du bon type de données visuelles est crucial. Des tâches comme la détection d'objets, la segmentation et le suivi de mouvement reposent non seulement sur des algorithmes mais aussi sur la qualité des données d'entrée. Des jeux de données propres, diversifiés et précis aident à réduire le bruit et à améliorer les performances.
En combinant des types de données comme le RGB, la profondeur, le thermique et le LiDAR, les systèmes d'IA obtiennent une vue plus complète de l'environnement, les rendant plus fiables dans diverses conditions. À mesure que la technologie continue de s'améliorer, elle ouvrira probablement la voie à une IA visuelle plus rapide, plus adaptable et plus percutante dans tous les secteurs.
Rejoins notre communauté et explore notre dépôt GitHub pour en savoir plus sur la vision par ordinateur. Découvre diverses applications liées à l'IA dans le secteur de la santé et à la vision par ordinateur dans la vente au détail sur nos pages de solutions. Consulte nos options de licence pour te lancer dans l'IA visuelle.






