Sécurité routière avec Ultralytics YOLO11 : détection par IA pour des rues plus sûres
Découvre comment Ultralytics YOLO11 améliore la sécurité routière grâce à la détection de nids-de-poule, l'estimation de la vitesse, le suivi des piétons et la reconnaissance de véhicules arrêtés.

Assurer la sécurité routière est un défi critique pour les urbanistes, les autorités chargées des transports et les systèmes de véhicules autonomes. Chaque année, des millions d'accidents se produisent en raison de conditions routières dangereuses, d'une mauvaise visibilité et d'obstacles imprévus.
Selon l'Organisation mondiale de la Santé (OMS), les accidents de la route sont l'une des principales causes de décès dans le monde, avec plus de 1,9 million de victimes chaque année. Pour résoudre ces problèmes, il faut des solutions innovantes qui vont au-delà des méthodes de surveillance traditionnelles.
L'intégration de l'intelligence artificielle (IA) et de la vision par ordinateur dans la sécurité routière est apparue comme une approche prometteuse. Des modèles comme Ultralytics YOLO11 offrent de puissantes capacités de détection d'objets, de suivi et de classification en temps réel, rendant les routes plus sûres pour les conducteurs comme pour les piétons.
Dans cet article, nous explorerons les principaux défis de la sécurité routière et comment YOLO11 peut soutenir une infrastructure plus intelligente.
Link to this sectionComprendre les défis de la sécurité routière#
Malgré les avancées technologiques, la gestion de la sécurité routière continue de faire face à des défis importants :
- Conditions routières dangereuses : Les nids-de-poule, les fissures et les débris routiers contribuent aux dommages causés aux véhicules et aux accidents, en particulier dans les zones mal entretenues.
- Excès de vitesse et conduite imprudente : L'application efficace des limitations de vitesse reste un défi dans de nombreuses régions, contribuant à des taux d'accidents élevés.
- Risques pour la sécurité des piétons : Les passages pour piétons non réglementés, la mauvaise visibilité et la distraction au volant mettent les piétons en danger, surtout dans les zones urbaines.
- Perturbations du trafic : Les véhicules en panne ou immobilisés provoquent souvent des embouteillages et augmentent la probabilité de collisions par l'arrière.
Ces défis soulignent la nécessité de systèmes de surveillance automatisés en temps réel capables d'améliorer les temps de réponse et de renforcer la sécurité routière globale. Les modèles de vision par ordinateur comme YOLO11 peuvent aider à résoudre ces problèmes en offrant des capacités avancées de détection et d'analyse.
Link to this sectionL'évolution de la vision par ordinateur dans la sécurité routière#
La vision par ordinateur pour la sécurité routière s'est améliorée au rythme des progrès de l'IA, de la technologie des capteurs et du traitement des données. À ses débuts, les algorithmes de vision par ordinateur étaient principalement utilisés pour la reconnaissance automatisée des plaques d'immatriculation et la surveillance simple du trafic, aidant les forces de l'ordre à suivre les infractions et à optimiser la fluidité du trafic.
Ces premiers systèmes reposaient sur des techniques de traitement d'image basées sur des règles, souvent limitées en précision et nécessitant des conditions d'éclairage et météorologiques idéales pour fonctionner efficacement.
L'introduction de modèles YOLO à haute vitesse comme YOLO11 a encore repoussé les limites de la détection en temps réel dans la surveillance de la sécurité routière.
Contrairement aux méthodes traditionnelles nécessitant plusieurs passages sur une image, les modèles YOLO peuvent traiter des images entières en temps réel, permettant de suivre les véhicules rapides, de détecter les infractions de voie et d'identifier les défauts de la route.
Aujourd'hui, la vision par ordinateur dans les voitures aide les villes et les agences de transport à utiliser des caméras dotées d'IA. Ces caméras surveillent la vitesse des véhicules, repèrent les infractions au code de la route et trouvent les dangers sur la route avec peu d'intervention humaine.
Dans le cadre des initiatives de ville intelligente, la détection des piétons et les ajustements dynamiques des feux de signalisation alimentés par des algorithmes de vision par ordinateur peuvent aider à réduire les accidents aux passages pour piétons et aux intersections. Parallèlement, la recherche sur les véhicules autonomes continue de tirer parti de la vision par ordinateur dans les systèmes automobiles pour la navigation, l'évitement d'objets et la conscience situationnelle.
Link to this sectionComment appliquer YOLO11 à la sécurité routière#
En automatisant la surveillance routière et en améliorant les capacités de détection, explorons quelques-unes des principales manières dont YOLO11 peut contribuer à des conditions routières plus sûres.
Link to this sectionDétection de nids-de-poule#
Les nids-de-poule sont une préoccupation majeure pour la sécurité routière, causant des dommages aux véhicules, augmentant les coûts d'entretien et entraînant des accidents. Les inspections routières traditionnelles reposent sur des évaluations manuelles, qui peuvent être lentes et inefficaces.
Avec YOLO11, la détection des nids-de-poule peut être automatisée grâce à l'analyse d'images en temps réel provenant de caméras montées sur des véhicules ou des drones. YOLO11 peut être entraîné à détecter les fissures, les nids-de-poule et les déformations de surface, permettant aux municipalités et aux autorités routières de prioriser les réparations plus efficacement.
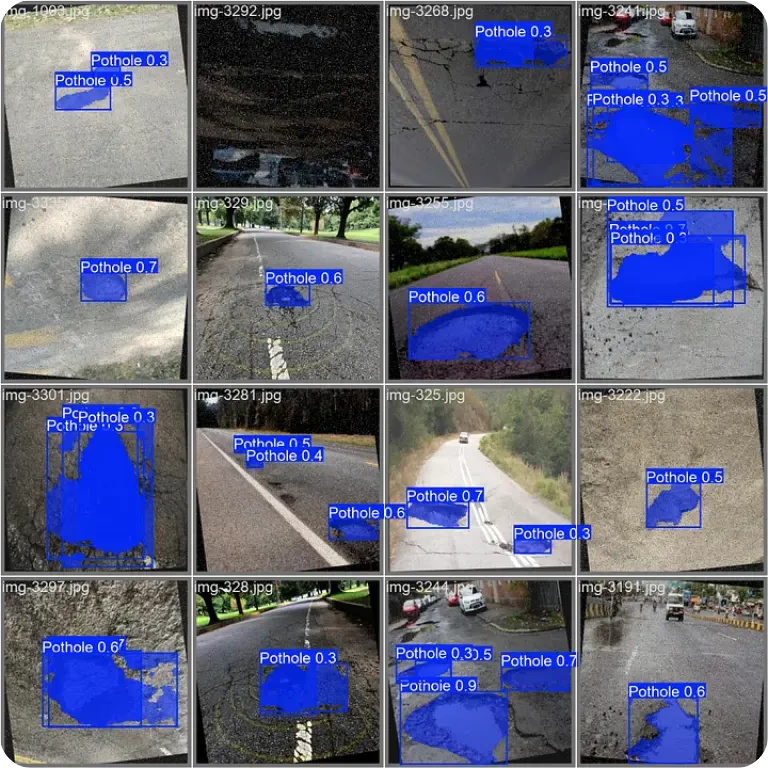
Fig 1. YOLO11 identifie les nids-de-poule sur les routes grâce à la détection d'objets, permettant une surveillance automatisée de l'état des routes et une planification efficace de l'entretien.
Par exemple, les équipes d'entretien des autoroutes peuvent déployer des drones équipés de YOLO11 pour scanner les routes et générer des rapports détaillés sur l'état de la chaussée. Ces données peuvent être utilisées pour planifier des réparations rapides, minimisant les risques pour les conducteurs et améliorant la qualité globale de l'infrastructure.
Au-delà de l'entretien, l'intégration de la détection des nids-de-poule aux systèmes de véhicules autonomes pourrait aider les voitures autonomes à détecter les nids-de-poule en temps réel, leur permettant d'ajuster leur itinéraire ou de ralentir à l'approche de tronçons de route endommagés. Cela réduirait non seulement l'usure des véhicules, mais minimiserait également les freinages brusques, pouvant contribuer aux embouteillages et aux collisions par l'arrière.
Link to this sectionEstimation de la vitesse#
Les excès de vitesse sont une cause majeure d'accidents, mais l'application efficace des limitations reste un défi. YOLO11 peut aider à estimer la vitesse des véhicules en analysant les séquences vidéo des caméras installées sur le bord des routes. En suivant les véhicules image par image, YOLO11 peut calculer leur vitesse en temps réel et fournir des informations précieuses pour la surveillance du trafic.
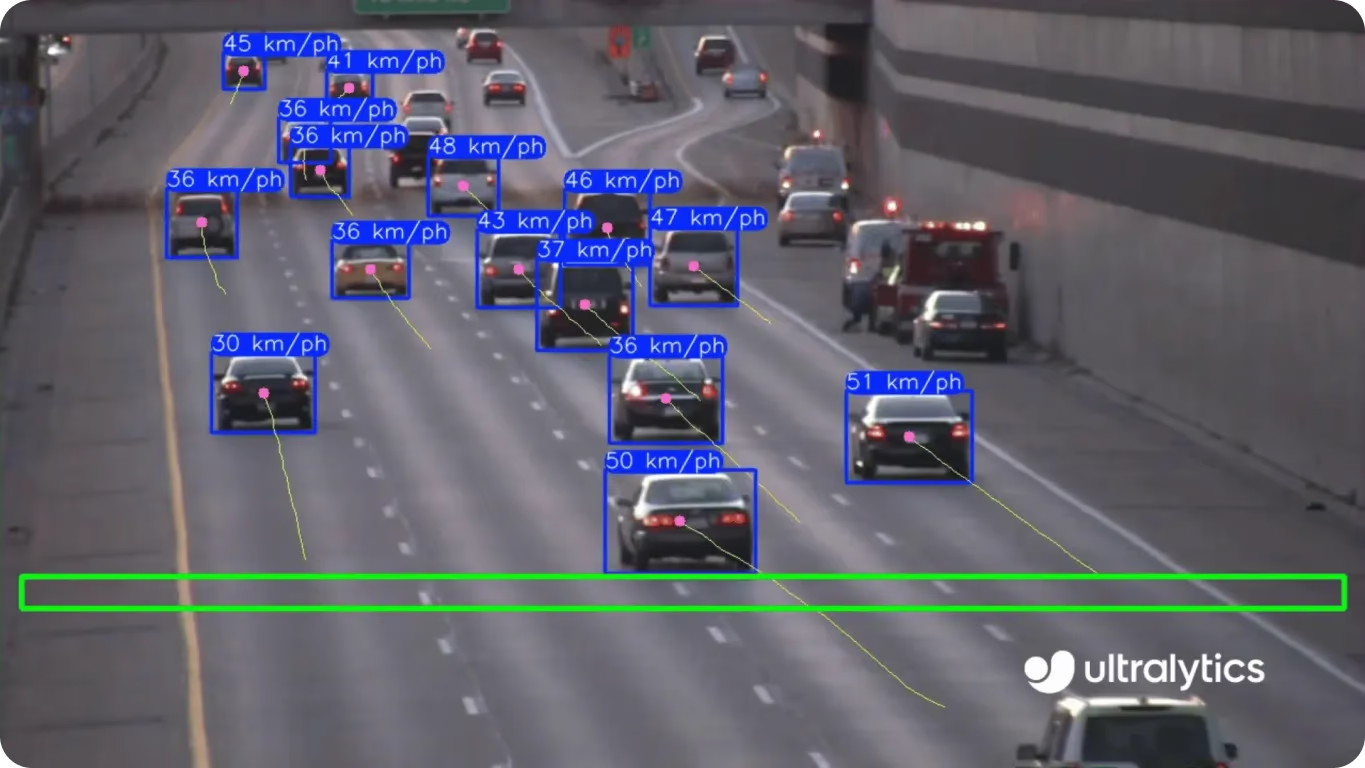
Fig 2. YOLO11 estime la vitesse des véhicules sur une autoroute, fournissant des informations pour la gestion et la surveillance du trafic afin d'améliorer la sécurité routière et le contrôle des embouteillages.
Par exemple, les autorités de transport peuvent intégrer YOLO11 dans les systèmes de surveillance du trafic existants pour surveiller les points chauds d'excès de vitesse. Ces données peuvent éclairer les décisions politiques, comme l'ajustement des limitations de vitesse dans les zones à haut risque ou le déploiement des forces de l'ordre à des endroits spécifiques.
De plus, les capacités d'estimation de vitesse de YOLO11 peuvent être utilisées dans des initiatives de ville intelligente pour améliorer la fluidité du trafic et réduire les embouteillages. En analysant la vitesse des véhicules sur différents tronçons routiers, les urbanistes peuvent optimiser les feux de circulation et rediriger les véhicules de manière dynamique.
Link to this sectionDétection des piétons#
La sécurité des piétons est une préoccupation croissante dans les zones urbaines, où les volumes de trafic élevés et la distraction au volant contribuent à des accidents fréquents. Les systèmes de surveillance traditionnels ont souvent du mal à détecter précisément les piétons, surtout dans des conditions de faible luminosité.
YOLO11 peut améliorer la détection des piétons en identifiant les individus traversant les routes, attendant aux intersections ou circulant près de véhicules en mouvement. Les caméras montées sur les feux de circulation ou sur les véhicules autonomes peuvent utiliser YOLO11 pour détecter les piétons en temps réel et ajuster les feux de signalisation en conséquence.
Pour assurer une détection précise des piétons, YOLO11 peut être entraîné sur de vastes datasets contenant des images annotées de piétons dans divers environnements, y compris les passages pour piétons, les trottoirs et les intersections. Ces jeux de données prennent en compte différents angles, occlusions et densités de foule, améliorant la fiabilité de la détection.

Fig 3. YOLO11 détecte les piétons à un passage pour piétons, renforçant la sécurité routière par une meilleure reconnaissance des piétons en temps réel.
Par exemple, les environnements de ville intelligente peuvent intégrer la détection des piétons dans les systèmes de gestion des passages pour piétons, garantissant que les feux restent rouges lorsque des piétons sont encore en train de traverser.
En outre, les pôles de transport public tels que les arrêts de bus et les stations de métro peuvent utiliser la détection des piétons pour analyser les mouvements de foule et optimiser les horaires des trains/bus. Cela garantit un flux de passagers efficace et réduit les temps d'attente pendant les heures de pointe.
Link to this sectionDétection des véhicules en panne#
Les véhicules en panne ou immobilisés peuvent perturber la fluidité du trafic et créer des situations dangereuses pour les autres conducteurs. Détecter ces véhicules rapidement est crucial pour éviter les embouteillages et minimiser les risques d'accident.
YOLO11 peut être entraîné à reconnaître les véhicules en panne sur les autoroutes, les ponts et dans les tunnels. En analysant les images en temps réel provenant de caméras de bord de route, YOLO11 peut détecter les véhicules stationnaires qui bloquent le trafic.
Par exemple, les centres de contrôle des autoroutes peuvent utiliser des systèmes de surveillance alimentés par YOLO11 pour identifier les véhicules en panne et envoyer une assistance routière plus rapidement. Cette approche proactive peut aider à prévenir les accidents secondaires et à assurer une circulation fluide.
Link to this sectionAvantages de l'utilisation de YOLO11 dans la sécurité routière#
L'intégration de YOLO11 dans les systèmes de sécurité routière offre plusieurs avantages :
- Surveillance améliorée : La détection en temps réel des dangers routiers, des véhicules en excès de vitesse et des piétons améliore la gestion du trafic.
- Précision accrue : Les capacités de détection d'objets de YOLO11 réduisent les faux positifs et assurent une surveillance fiable.
- Temps de réponse plus rapides : Les systèmes automatisés peuvent détecter les problèmes de sécurité routière immédiatement, permettant une intervention plus rapide.
- Économies de coûts : La réduction des accidents et l'optimisation de la fluidité du trafic réduisent les coûts d'entretien routier et d'intervention d'urgence.
- Évolutivité : YOLO11 peut être déployé dans différents environnements, des rues urbaines aux autoroutes, en soutenant diverses initiatives de sécurité.
Link to this sectionL'avenir de la sécurité routière avec la vision par ordinateur#
Bien que YOLO11 fournisse une détection puissante en temps réel pour la sécurité routière, les futures avancées en matière de vision par ordinateur et d'IA pourraient faire progresser la sécurité routière encore plus loin.
Un développement potentiel est la gestion prédictive du trafic, où les modèles d'IA analysent de grandes quantités de données provenant de capteurs routiers, de caméras et des conditions météorologiques pour prévoir les zones de congestion ou les zones propices aux accidents.
Cela pourrait permettre aux autorités de prendre des mesures proactives, comme l'ajustement dynamique des limitations de vitesse en fonction des conditions routières ou la redirection du trafic avant que des goulots d'étranglement ne se forment.
Une autre direction prometteuse concerne les systèmes de contrôle du trafic autonomes. En intégrant les systèmes de vision par ordinateur à l'infrastructure de ville intelligente, les feux de circulation pourraient s'ajuster en temps réel pour prioriser les véhicules d'urgence, réduire les délais aux intersections et assurer une circulation plus fluide des véhicules et des piétons.
Grâce aux améliorations continues de la surveillance routière par IA, la vision par ordinateur est prête à jouer un rôle encore plus important dans le façonnement de l'avenir de la sécurité des transports.
Link to this sectionPoints clés#
La sécurité routière reste un défi mondial pressant, mais les avancées de l'IA et de la vision par ordinateur offrent de nouvelles opportunités d'amélioration. En tirant parti de YOLO11 pour la détection des nids-de-poule, l'estimation de la vitesse, la surveillance des piétons et la détection des véhicules en panne, les autorités de transport et les urbanistes peuvent créer des réseaux routiers plus sûrs et plus efficaces.
Qu'il soit utilisé pour optimiser la fluidité du trafic, prévenir les accidents ou améliorer l'entretien routier, YOLO11 démontre le potentiel de la vision par ordinateur à transformer la sécurité des transports. Explore comment YOLO11 peut contribuer à des solutions de sécurité routière plus intelligentes et plus durables.
Rejoins notre communauté et consulte notre dépôt GitHub pour en savoir plus sur l'IA. Explore diverses applications de la vision par ordinateur dans la fabrication et de l'IA dans la conduite autonome sur nos pages de solutions. Jette un œil aux options de licence disponibles pour commencer !






