ビジョンAIを用いたボール軌道予測の強化
ビジョンAIがどのようにボールの軌道予測を改善し、スポーツ、ロボット工学、その他のスマートアプリケーションにリアルタイムの洞察をもたらすかをご覧ください。

お気に入りのバスケットボール選手がシュートを打つとき、そのシュートが決まるか外れるか、多くの場合は見ていてわかります。人間はこれまでの様々なバスケットボールの試合を見てきて、何が起こるかを経験的に理解しているため、このように予測できます。では、カメラを通してバスケットボールの試合を見て、そのシュートが入るかどうかを判断しようとするマシンを想像してみてください。
これは非常に複雑な問題です。私たちが経験を通じて身につける視覚的な知能を再現することは、言葉で言うほど簡単ではありません。実際、ボールの軌道予測は、マシンが動き、回転、角度を分析してボールの落下地点を予測する方法を探求する非常に興味深い研究分野です。

図1:バスケットボールのシュートの軌道 (出典)
1537年という早い時期に、イタリアの数学者ニッコロ・タルタリアは、砲弾は45度の角度で発射されたときに最も遠くまで飛ぶことを発見しました。彼の発見は、現代における運動や予測の理解の基礎となりました。
現在、コンピュータサイエンスと人工知能(AI)の進歩により、マシンはボールの軌道をリアルタイムで正確に予測できるようになりました。AIシステムは、ボールの位置、速度、回転、角度などの詳細を分析することで、落下地点を予測できます。これは、選手トレーニングやパフォーマンス分析から、ヘルスケア、ロボット工学に至るまで、幅広いアプリケーションに役立ちます。
特に、コンピュータビジョンは、マシンが周囲の世界からの視覚情報を解釈して理解するのを助けるAIの分野です。これにより、システムはカメラやビデオを通じて、物体を認識し、その動きを追跡し、見えているものを理解できるようになります。
ボールの軌道予測に応用する場合、Ultralytics YOLO11やUltralytics YOLO26のようなコンピュータビジョンモデルを使用することで、システムはボールをフレームごとに検出および追跡できます。この視覚データは各フレームにおけるボールの正確な位置情報を提供し、これを基に速度や方向の経時的な推定が可能になります。さらに、AIモデルや様々なアルゴリズムを用いて、ボールが次にどこへ向かうかを予測できます。
この記事では、ボールの軌道予測、関連する様々なアプローチ、そしてコンピュータビジョンの役割について解説します。それでは始めましょう!
Link to this sectionボール軌道予測の重要性#
単なる興味深い研究分野にとどまらず、ボールの軌道予測は多くの分野で実用的かつ影響力のある技術開発を推進しています。例えば、自動運転車において、軌道予測は車両が他の車両、自転車、歩行者の将来の経路を予測することを可能にします。これらの移動物体が数秒後にどこにいるかを予測することで、自動運転システムは速度調整、車線変更、または衝突の事前回避を行い、より安全で効率的な判断を下すことができます。
同様に、ロボット工学において、ボールの軌道予測は、マシンが移動物体を高い精度で検出、追跡、反応することを可能にします。これは、産業用ロボットや配送ドローンなど、動きの速い物体をリアルタイムで扱う必要がある自動システムにおいて特に有用です。
Link to this sectionボール軌道予測の仕組みの概要#
では、ボールの軌道予測は実際にどのように行われるのでしょうか?それは使用される手法によって異なります。一般的に、どの手法も、現在のボールの動きを理解し、次にどこへ行くかを予測するという同じ目的を持っています。
以下に、使用されるいくつかの異なるアプローチの概要を示します。
- 物理ベースのモデリング: このアプローチでは、運動法則と空気力学を用いて、速度、発射角度、重力、空気抵抗などの要因がボールの飛行経路に与える影響を計算します。
- 機械学習モデル: これらのモデルは、大量の運動データを分析してボールの動きのパターンを学習し、明示的な物理方程式に頼ることなく正確な予測を可能にします。
- コンピュータビジョンベースの予測: この手法では、ビデオ映像を使用してボールをフレームごとに検出・追跡し、アルゴリズムが速度、方向、将来の位置を推定するのに役立つ視覚データを生成します。
- センサーベースのシステム: これらのシステムは、モーションセンサー、レーダー、赤外線カメラからのデータを使用して、ボールの位置、速度、回転をリアルタイムで精密に測定します。
- ハイブリッド手法: これらは2つ以上の手法を組み合わせたものです。例えば、コンピュータビジョンと物理ベースのモデリングを統合することで、より正確で信頼性の高い軌道予測を実現します。
次に、コンピュータビジョンベースのボール軌道予測がどのように機能するのか、またそれを可能にするアルゴリズムについて詳しく見ていきます。
Link to this sectionボール軌道予測の基礎#
コンピュータビジョンがボールの軌道予測においてどのような役割を果たし、システムがどのように機能するかを見る前に、まずは基本を押さえておきましょう。
ボールの軌道予測は、一般的に「追跡」と「運動モデリング」という2つの主要な部分で構成されます。追跡アルゴリズムは、ビデオ内でフレームごとにボールを追いかけ、次にどこに現れるかを推定するために使用されます。これらの手法は、短期的かつリアルタイムな予測に役立ちます。
一方で、運動モデリング手法(通常は物理学や機械学習を伴う)は、さらに一歩進んだアプローチをとります。これらは、ボールの落下地点を含む、完全な飛行経路を予測することを目的としています。
簡単に言うと、追跡はボールの現在の位置と動きを特定し、モデリングはその情報を使用して将来の経路と落下地点を推定します。これらを組み合わせることで、正確なリアルタイムのボール軌道予測が可能になります。
Link to this section追跡と運動モデリングの詳細#
なぜ追跡と予測を区別する必要があるのか疑問に思うかもしれません。このトピックをさらに深掘りしていくと、多くの追跡アルゴリズムは単に「追跡」するだけではないことに気づくはずです。それらは、ボールが次にどこに現れるかについての短期的な予測も行います。
例えば、ByteTrackやSORTなどの追跡アルゴリズムを通じて物体追跡をサポートするYOLO11のようなコンピュータビジョンモデルは、各ビデオフレームからの検出データを使用して、ボールの次の位置をリアルタイムで推定します。これにより、ボールが高速で移動したり、一部が隠れたりしても、システムは正確な追跡を維持できます。
しかし、これらのモデルは動きを追いかけることには優れていますが、通常はボールの飛行経路や落下地点全体を予測するのではなく、次の位置のみを予測します。ここで、運動モデリング手法が不可欠となります。
言い換えれば、コンピュータビジョンモデル単体では、ボールの軌道を完全に予測することはできません。ボールの位置をフレームごとに検出・追跡することはできますが、重力、スピン、ドラッグ、空気抵抗など、動きに影響を与える物理的な力を考慮していないからです。
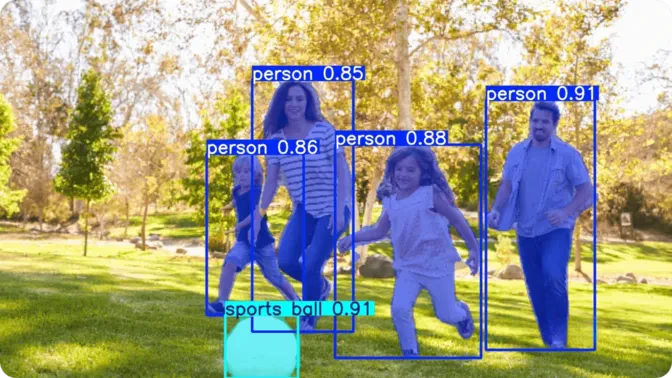
図2:YOLO11を使用したボール検出とセグメンテーションの例 (出典)
長期的な予測を正確に行うために、コンピュータビジョンからの視覚データは、多くの場合、運動モデリング手法と組み合わされます。これらの手法では、物理方程式または機械学習アルゴリズムを使用して時間の経過に伴うボールの動きを分析し、落下地点を含む完全な経路を予測します。
Link to this sectionコンピュータビジョンでボール追跡によく使用されるアルゴリズム#
追跡アルゴリズムは、ボール軌道予測システムにおいて重要な要素です。これらは、短い遮蔽(ボールが他の物体によって一時的に隠れる場合)などの課題を処理しながら、時間の経過に伴うボールの位置と動きを推定します。
次に、一般的な追跡アルゴリズムをいくつか紹介します。
Link to this sectionカルマンフィルタ#
カルマンフィルタは、測定値にノイズが含まれていたり不完全であったりする場合でも、物体の位置と速度を時間の経過とともに推定するために使用される数学的アルゴリズムです。例えばNASAは、飛行体の経路を追跡および再構築するためにカルマンフィルタを使用しています。
センサーデータと車両運動モデルを組み合わせることで、システムはノイズの多いデータを浄化し、実際の飛行軌道を正確に再構築し、車両が次にどこへ向かうかについて短期的な予測を行うことができます。これにより、多くの分野においてリアルタイムの追跡および制御に非常に有用なフィルタとなっています。
カルマンフィルタ自体はコンピュータビジョンアルゴリズムではありませんが、視覚ベースのシステムでは、ボールのような移動物体をビデオフレーム全体で追跡するためによく使用されます。その仕組みは、物体が次にどこに現れるかを予測し、その予測と実際の検出データを比較してから、推定値を更新して精度を維持するというものです。この継続的な予測と修正のサイクルにより、物体が一時的に視界から消えたり、突然速度が変わったりしても、リアルタイムでの追跡が効果的に行えます。
Link to this sectionByteTrack#
ByteTrackは、ビデオフレーム全体でボールなどの移動物体を追いかけるために使用されるリアルタイム物体追跡アルゴリズムです。各フレームで物体を検出し、時間の経過とともに同じ物体の検出結果をリンクさせることで、「トラックレット」と呼ばれる連続したシーケンスを作成します。
トラックレットは、物体がどこにあり、どのように移動したかを示す短い一連のフレームです。このリンク処理により、システムはビデオ全体を通して各物体のアイデンティティを一定に保つことができます。
信頼性の低い検出結果を破棄する古い追跡手法とは異なり、ByteTrackはそれらを保持し再確認します。これは、物体が高速で移動したり、ぼやけたり、一時的に隠れたりしても、スムーズで安定した追跡を維持できることを意味します。ByteTrack自体は物体検出器ではありませんが、Ultralytics YOLOv8やYOLO11のようなコンピュータビジョンモデルと組み合わせて、リアルタイムで正確かつ信頼性の高い追跡を行うためによく使用されます。
Link to this sectionBoT-SORT#
BoT-SORTは、ビデオフレーム全体で移動物体を追いかけるシステムを改善する高度なマルチオブジェクト追跡アルゴリズムです。これはByteTrackをベースにしており、カメラモーション補正や物体再識別などの重要な機能が追加されています。
カメラモーション補正は、パンやシェイクのようなカメラの動きを補正し、再識別は、物体が視界から外れて再び現れた後でも、システムがそれを認識して追跡し続けることを可能にします。ByteTrackと同様に、YOLOv8やYOLO11のようなモデルと組み合わせて使用されます。
Link to this section一般的な軌道予測手法#
追跡の仕組みと、それがボールの軌道予測とどのように関連しているかを確認したところで、ボールの動きを推定するために使用される主な軌道予測アルゴリズムと手法を詳しく見ていきましょう。
Link to this section物理ベースの運動学モデリング#
物理ベースの運動学モデリングは、基本的な運動法則を使用してボールの軌道を予測します。ボールの初速度、発射角度、重力、空気抵抗、スピンなどの要因を考慮して、飛行経路を計算します。これらの要因を組み合わせることで、モデルはボールがどの瞬間にもどこにあり、どれくらいの速さで移動し、どの方向に向かっているかを推定します。
例えば、野球やゴルフのようなスポーツにおいて、スイング速度と発射角度に基づいてボールがどれくらいの距離を、どの方向に飛ぶかを予測するのに役立ちます。制御された環境では非常に正確ですが、風、跳ね返り、選手間のインタラクションといった予測不可能な現実世界の状況では苦戦し、予測エラーが発生する可能性があります。
コンピュータビジョンと組み合わせると、物理モデルベースの手法はスポーツ分析や審判業務における実用的なアプリケーションを可能にします。例えば、Hawk-Eyeは、ボールの3D軌道をリアルタイムで再構築するマルチカメラ視覚システムです。
これは、複数の同期された高速カメラを使用して複数の角度からボールの位置を捉え、三角測量、運動学方程式、補間手法を適用して軌道を推定します。この統合により、テニス、クリケット、サッカーなど、軌道の精度がラインコールやパフォーマンス分析に不可欠なスポーツにおいて、正確な追跡と意思決定がサポートされます。
Link to this section機械学習回帰モデル#
機械学習回帰モデルは、明示的な物理方程式に頼ることなく、ボールの将来の位置や軌道を予測できます。その代わり、ビデオベースの追跡システムやセンサーを通じて収集された位置、速度、スピン、角度などのデータからパターンを学習します。
コンピュータビジョンの追跡アルゴリズムと組み合わせると、視覚システムはビデオフレーム全体でのボールの位置をキャプチャします。この位置データが回帰モデルへの入力となり、時間の経過とともにボールの動きがどのように変化するかをモデルが学習します。一度学習すれば、モデルは既に観測された内容に基づいて、ボールの次の位置や全体的な経路を予測できるようになります。
例えば、卓球ロボットやピンポンロボットシステムに関しては、数千の追跡軌道で学習された回帰モデルが、ボールの飛行やバウンドのパターンをリアルタイムで予測できることが示されています。これにより、ロボットは位置を調整したり、素早く反応してピンポン球や卓球ボールをキャッチまたは打ち返すことができます。これらのモデルは現実世界の例から直接学習するため、物理ベースのみの手法よりも、スピン、空気抵抗、表面接触のような予測不可能な影響をうまく処理できることが多いです。
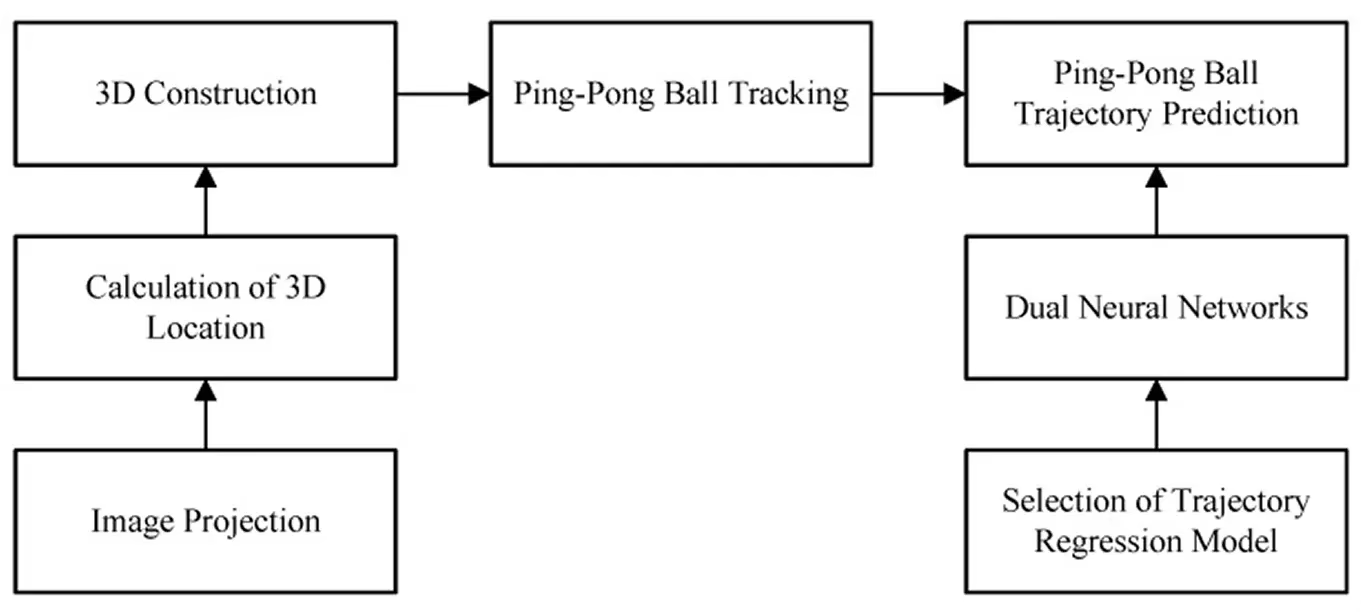
図3:ピンポンロボットがどのようにボールの軌道を予測するか (出典)
Link to this sectionリカレントニューラルネットワーク(RNN)および長短期記憶(LSTM)ネットワーク#
リカレントニューラルネットワーク(RNN)および長短期記憶(LSTM)ネットワークは、動きやその他の時系列情報など、時間の経過とともに変化するデータを処理するように設計されたAIモデルです。これらは以前に何が起こったかを記憶できるため、動きのパターンを認識し、次に何が起こるかを予測するのに役立ちます。
ボール軌道予測において、これらのモデルはボールの過去の位置、速度、スピンが将来どこへ向かうかにどう影響するかを学習します。コンピュータビジョンや物体追跡と組み合わせることで、視覚システムはフレーム間のボールの位置を捉えることができます。RNNは、この位置シーケンスを使用して、ボールの次の動きや完全な経路を予測できます。
また、LSTMは長期間にわたって情報を記憶できるため、特に効果的です。これにより、ボールが高速で移動したり方向を変えたりしても、その動きを完全に追いかけることができます。
最近の研究では、このアイデアをさらに一歩進めています。科学者たちは、プレイヤーの動きや相互作用を分析することで、チームスポーツにおけるボール軌道を予測できる階層型Bi-LSTMモデルを開発しました。これらのモデルは、プレイヤーの行動パターンを使用してボールが最も可能性の高い位置を推測することで、一時的に隠れたり視界から外れたりした場合でもボールの位置を推定できます。
Link to this sectionボール軌道予測の現実世界への応用#
コンピュータビジョンとボール軌道予測についての理解を深めたところで、スポーツ、リハビリテーション、ロボット工学などの分野における実用的な応用例を見ていきましょう。
Link to this sectionスポーツにおけるボール軌道予測#
ボールがどのように動き、どこに着地するかを理解することは、多くのスポーツにおいて非常に重要です。カメラやセンサーからの情報を使用して、AIモデルはボールの経路と初速度を予測し、スポーツチームがプレーを予測し、技術を向上させ、よりスマートな意思決定を行うのを支援します。
また、スピンやリリース角度などの要因を分析することで、選手がパフォーマンスを向上させ、怪我を防ぐためのトレーニングもサポートします。多くの最先端スポーツトレーニングシステムでは、スキル開発と戦略を強化するためにボール軌道予測が活用されています。
例えば、研究者は、テニスボールの軌道を検出・予測できるテニスロボット用のコンピュータビジョンシステムを開発しました。ステレオカメラと畳み込みニューラルネットワークを使用することで、システムはボールを3次元(x軸、y軸、z軸)で捉え、プレー中により正確に対応できるようになります。これは、大会に向けて選手をトレーニングするためのゲームチェンジャーとなり得るツールです。
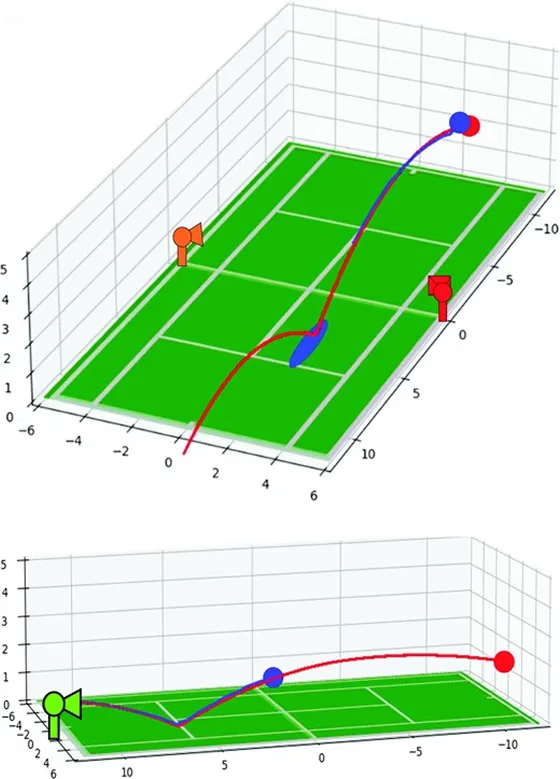
図4:赤はシミュレーションされた経路、青はロボットによるボール軌道予測を示す。 (出典)
Link to this sectionコンピュータビジョンベースのボール軌道予測の長所と短所#
以下に、コンピュータビジョンベースのボール軌道予測システムを使用する主な利点を挙げます。
- リアルタイム予測: これらのシステムは、高速であってもボールの将来の経路を瞬時に正確に予測できます。
- 非侵襲的: 物理的なセンサーやマーカーを必要とせず、ビデオ入力のみで動作可能です。
- スケーラブルかつ適応可能: ビジョンベースのボール軌道予測システムは、標準的なカメラセットアップを使用して、様々なスポーツや環境に適用できます。
コンピュータビジョンベースのボール軌道予測には多くの利点がありますが、考慮すべきいくつかの制限もあります。以下の要因に留意してください。
- 遮蔽の課題: ボールが選手や他の物体の後ろに隠れると、予測精度が低下することがよくあります。
- 照明と視認性の問題: 夜間のような劣悪な照明条件や複雑な背景の下では、これらのシステムのパフォーマンスが低下する可能性があります。
- 高い計算需要: 高フレームレートのビデオを処理し、ディープラーニングモデルを動かすには、高価になる可能性のある強力なハードウェアが必要です。
Link to this section重要なポイント#
ビジョンAIを用いたボールの軌道予測は、物理学、コンピュータビジョン、機械学習を融合させ、驚くべき精度で動きを理解し予測します。スポーツパフォーマンスの分析から、患者の回復支援、産業自動化システムまで、軌道予測は視覚データを実用的な洞察に変えます。テクノロジーが進化し続ける中で、それはパフォーマンス、安全性、意思決定を強化する、よりスマートで高速、そして適応性の高い手法への道を切り開いています。
成長を続ける私たちのコミュニティに参加し、実践的なAIリソースについては私たちのGitHubリポジトリを探索してください。今すぐビジョンAIで構築を始めるには、ライセンスオプションをご覧ください。農業におけるAIがどのように農業を変革しているか、またロボット工学におけるビジョンAIがどのように未来を形作っているかについては、ソリューションページをご覧ください。






