コンピュータービジョンプロジェクトのためのエッジデバイス選び
パフォーマンス、電力効率、デプロイの要件に基づき、コンピュータービジョンプロジェクトに適したエッジデバイスを選択する方法をご覧ください。
Edge AIは、人工知能とコンピュータビジョンの分野で最大のトレンドの1つになりつつあります。これは、データを別の場所に送信して処理するクラウドコンピューティングに頼るのではなく、リアルタイムのインテリジェンスをデバイスにもたらすものです。実際、世界のedge AI marketは、2034年までに約1430億6000万ドルに達すると予測されています。
近年の技術の進歩により、エッジAIは多くの業界でリアルタイムのビジョンベースの自動化を再定義しています。製造現場における品質検査はその好例です。
ここでは、ビジョンAIカメラがコンベアベルト上の製品を継続的に分析します。これらを使用して、欠陥や異常を迅速に検出できます。これは、手術器具の製造のように高精度が求められる業界では特に重要です。
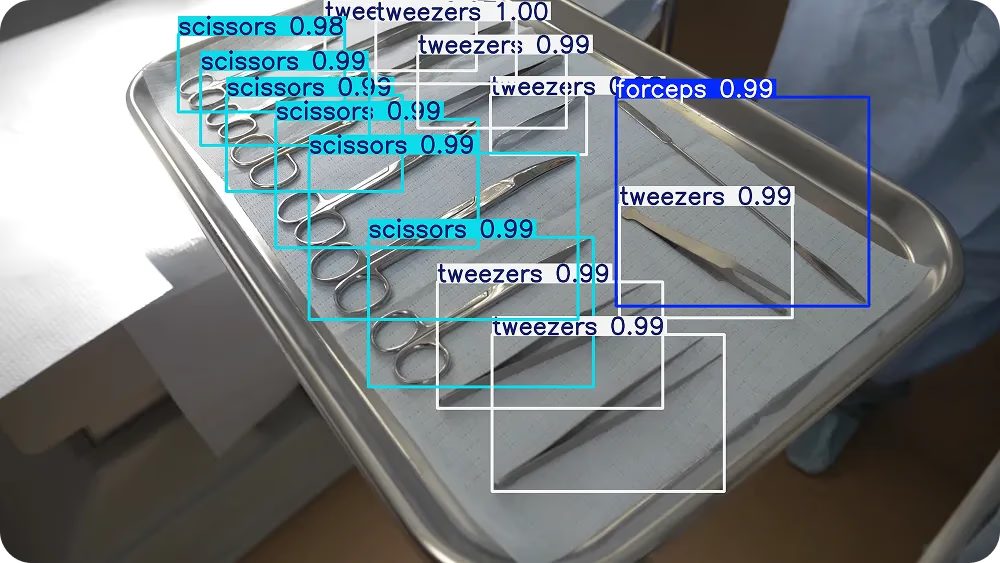
図1. ビジョンAIを使用して手術器具を検出する例
しかし、エッジデバイスとは正確には何でしょうか?これらは、Ultralytics YOLO26のようなAIモデルやコンピュータビジョンモデルを、データが生成される場所、またはその近くで実行できるハードウェアシステムのことです。
これには、工場内、スマートカメラ内部、あるいは自律走行車両への搭載などが含まれます。ローカルで推論を実行することで、これらのデバイスはより高速な応答時間を実現します。また、視覚データをクラウドにストリーミングする必要がないため、帯域幅の使用量も削減されます。
しかし、コンピュータビジョンプロジェクトに適したエッジデバイスを選択するのは難しい場合があります。ある環境でうまく機能するハードウェアが、別の環境では適していない可能性があるからです。
例えば、工場のフロアで確実に動作するデバイスが、重量や電力の制約が大きく異なるドローン点検では機能しない場合があります。間違ったデバイスを選択すると、コストが増大し、導入が遅れ、スケーリングが複雑になる可能性があります。
そのため、単なる計算能力だけでなく、デバイスのサイズ、電力エンベロープ、熱制限、産業用としての可用性などの要因を評価する必要があります。この記事では、エッジAIについて、そしてコンピュータビジョンアプリケーションに最適なエッジデバイスを選ぶ方法を探ります。それでは始めましょう!
Link to this sectionエッジデバイスを使用する主な利点#
特定のビジョンAIプロジェクトに最適なエッジデバイスの選び方を深く掘り下げる前に、一歩引いて、ビジョンAIプロジェクトでエッジデバイスを使用する利点をいくつか議論しましょう。
エッジでビジョンAIを展開する主な利点をいくつか挙げます:
- リアルタイムパフォーマンス: データはカメラが配置されている場所またはその近くで処理されるため、欠陥検出、安全監視、ロボティクスなどの用途で即時の応答が可能です。このローカル処理はリアルタイムの意思決定をサポートし、システムがクラウド接続に頼ることなく、変化する状況に直ちに対応できるようにします。
- 帯域幅コストの削減: 未加工の動画をクラウドにストリーミングするのではなく、エッジデバイスはメタデータ、アラート、または関連する洞察のみを送信します。これにより、ネットワーク負荷とクラウドストレージの費用が大幅に削減されます。
- オフライン動作: ほとんどのエッジシステムは、工場、倉庫、遠隔地で一般的な、インターネット接続が不安定または制限されている環境でも動作し続けることができます。
- プライバシーの向上: 動画データはオンサイトに残るため、プライバシーやコンプライアンスの要件を満たしやすくなり、機密情報の漏洩リスクを低減できます。
- 多くの場所で容易にスケーリング可能: エッジアーキテクチャは中央集中型のクラウドインフラへの依存を減らします。これにより、チームは一貫したパフォーマンスで複数の場所に同じセットアップを複製できます。
Link to this sectionアプリケーションの要件を理解する#
最適なエッジデバイスを選ぶための最初のステップは、アプリケーションが実際に何を必要としているかを理解することです。選択するハードウェアは、システムに期待される動作、必要な実行速度、および配置場所と一致している必要があります。
まずはパフォーマンス要件を定義することから始めましょう。高FPS(1秒あたりのフレーム数)でのリアルタイムAI推論を必要とするソリューションもあれば、フレームをグループやバッチ単位で処理できるものもあります。
モデルの複雑さとサイズも重要な役割を果たします。軽量な物体検出モデルは小型で低電力のデバイスで実行できることが多い一方、より複雑で大規模なモデルや多段階のパイプラインは、より多くの計算能力とメモリを必要とします。
次に、データセットアップを検討してください。これには、カメラの解像度、フレームレート、並列ストリーム数、およびRGB、熱画像、深度などのセンサータイプが含まれます。これらの要因は、帯域幅、スループット、メモリ使用量、およびシステム全体の負荷に直接影響します。
Link to this section精度とレイテンシのトレードオフ#
ハードウェアやデータの要件を超えて、モデルの選択はシステム全体のパフォーマンスにおいて重要な役割を果たします。ほとんどのエッジ展開には、レイテンシと精度のトレードオフが伴います。精度が高いモデルは通常、計算負荷が高く、推論時間が増加する可能性があります。
一方、高速なモデルは精度を多少犠牲にする場合があります。目標は、特定のユースケースと運用の制約に基づいて、速度と精度の適切なバランスを見つけることです。
例えば、自動化された食品生産ラインでは、コンピュータビジョンシステムを使用して、製品が梱包・出荷される前に検査を行います。これらのシステムは、コンベアベルトの速度を落とさないよう、リアルタイムで動作しなければなりません。
ピザの組み立てラインを考えてみましょう。システムは各ピザに正しいトッピングが乗っているかを確認する必要があります。Ultralytics YOLO26のようなモデルであれば、ピザとそのトッピングをリアルタイムで検出し、欠けている材料や誤った材料を識別できます。このシナリオでは、モデルはエラーを検出できる十分な精度を持ちつつ、エッジハードウェアで生産速度に追従できるほど高速である必要があります。
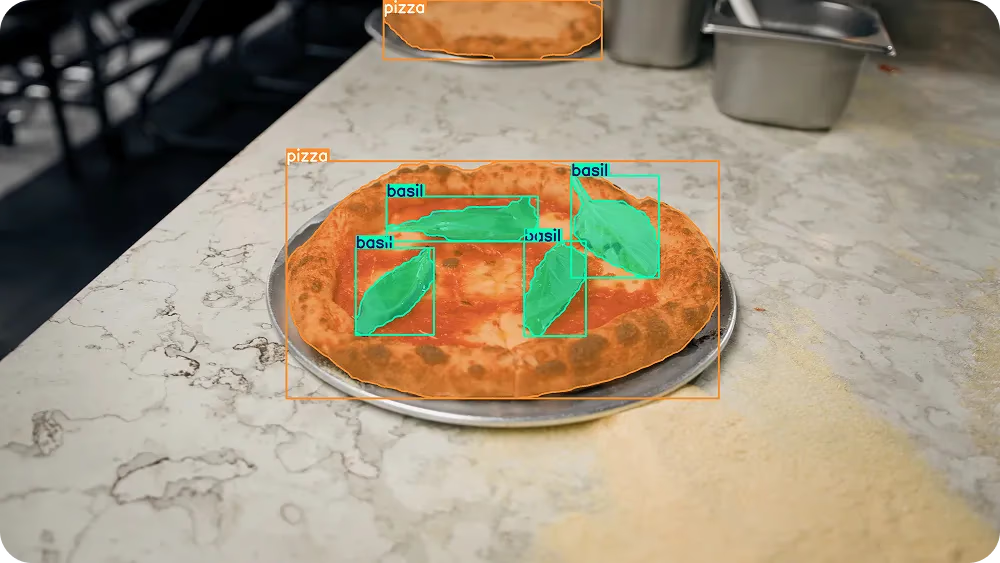
図2. Ultralytics YOLO26を使用してピザとそのトッピングを検出しセグメンテーションする様子。
Link to this sectionエッジデバイスのサイズを考慮する#
計算パフォーマンス以外に、エッジデバイスの物理的なサイズも展開計画における重要な要素です。デバイスのフォームファクタ(物理的なサイズ、形状、取り付けスタイル、拡張インターフェース)は、環境への統合のしやすさや、実際の環境下でのパフォーマンスに直接影響します。
Link to this sectionエッジAIデバイスの種類とフォームファクタ#
エッジAIハードウェアには、ラックマウントサーバーやPCIeアクセラレーターカードから、コンパクトなM.2モジュール、System-on-Module (SoM) プラットフォーム、シングルボードコンピュータ (SBC)、スマートカメラ、さらにはオンチップAI処理を備えたインテリジェントビジョンセンサーまで、多くのフォームファクタがあります。それぞれの形式は、パフォーマンス、電力効率、熱設計、および統合の複雑さにおいて異なるトレードオフを提供します。
デバイスのサイズは、冷却要件、電力供給、およびシステム全体のアーキテクチャと密接に関連しています。ラックマウント型の産業用PCやタワーワークステーションのような大型システムは、通常、フルハイトのPCIe GPU、複数の拡張カード、およびアクティブ冷却をサポートしています。これらのプラットフォームは、マルチカメラ処理、集中型エッジハブ、または高スループットの動画分析に適しています。
対照的に、M.2アクセラレーター、カスタムキャリアボードに搭載されたSoM、SBC、オールインワンのスマートカメラといったコンパクトなフォームファクタは、スペースが限られた環境向けに設計されています。これらの小型デバイスは多くの場合、電力効率とパッシブ冷却を優先しており、組み込みシステム、モバイルロボット、ドローン、キオスク、および分散型検査ユニットに最適です。
極端な小型化の例としては、インテリジェントビジョンセンサーやマイクロコントローラベース(TinyML)のプラットフォームがあります。ここでは、推論がイメージセンサーまたは低電力プロセッサで直接実行されます。これらのシステムは物理的なフットプリントとエネルギー消費を大幅に削減しますが、通常はより狭く高度に最適化されたワークロードに適しています。
このようなサイズ、モジュール性、統合モデルの違いは、一般的に「スケーラブルな展開」と「スペース制約のある展開」という2つの一般的なエッジ展開カテゴリにつながります。それぞれのアプローチは、異なるパフォーマンス、電力、環境制約に対処しつつ、長期的な保守性とシステム設計を形成します。
Link to this sectionスケーラブルな展開#
PCIeアクセラレーターやラックマウント型または産業用パーソナルコンピュータ (PC) は、プロジェクトが高い計算能力を必要とする場合や、複数のカメラからのデータを同時に処理する必要がある場合によく使用されます。PCIeアクセラレーターは、PCIeスロットを通じて大型コンピュータ内にインストールされるハードウェアカードです。
これは、GPUやその他のAIアクセラレーターといった専用の計算リソースを追加し、システムのAIワークロード処理能力を向上させます。これは、デスクトップコンピュータのグラフィックスカードがパフォーマンスを向上させる仕組みと似ています。
ラックマウント型または産業用PCは、工場、生産フロア、制御室などの環境で継続的に運用できるように設計された、堅牢で大型のシステムです。これらは冷却、ハードウェア拡張、高電力コンポーネントのためのより多くのスペースを提供するため、マルチカメラの品質検査や大規模な動画分析といった要求の厳しいワークロードに適しています。
Link to this sectionスペース制約のある展開#
スペース制約のある展開は、物理的、熱的、または電力の厳しい制限内でエッジデバイスを動作させる必要がある環境で一般的です。これには、生産ラインに取り付けられたスマートカメラ、モバイルロボット、ドローン、キオスク、またはコンパクトな検査システムが含まれます。
これらのケースでは、ハードウェアは小型、軽量、かつエネルギー効率に優れている必要がありながら、信頼性の高いAIパフォーマンスを発揮する必要があります。これらの展開における2つの一般的なハードウェアオプションは、M.2モジュールとシングルボードコンピュータです。
M.2モジュールは、ホストシステム内のM.2スロットに収まるコンパクトな拡張カードです。M.2は単なるフォームファクタおよびインターフェース規格ですが、AIアクセラレーション専用に設計されたモジュールも存在します。
これらのAIアクセラレーターモジュールにより、小型デバイスはサイズや消費電力を大幅に増やすことなく、コンピュータビジョンモデルをより効率的に実行できます。M.2アクセラレーターは、フルサイズのPCIe拡張カードを追加するのが現実的ではない組み込みシステムによく統合されます。
一方、シングルボードコンピュータは、単一の回路基板上に構築された完全なコンピュータです。CPU、メモリ、ストレージインターフェース、および入出力 (I/O) 接続をコンパクトなフォームファクタに統合しています。すべてが1つのボードに含まれているため、SBCはスペースが限られ、シンプルさが重要視される組み込みアプリケーションやエッジアプリケーションで広く使用されています。
スペース制約のあるシステムは、大型のラックマウントシステムよりも生の計算パフォーマンスは劣ることが一般的ですが、データが生成される場所の近くでデバイス内推論を可能にします。これにより、レイテンシが短縮され、帯域幅の使用量が減り、大型ハードウェアが適合しない環境での展開の柔軟性が向上します。
Link to this section組み込みビジョン向けの専用AIアクセラレーション#
多くのハードウェアベンダーが、組み込みビジョン向けのコンパクトで電力効率の高いAIアクセラレーションに注力しています。例えば、Axelera AIは、Metis® AI Processing Unit (AIPU)アクセラレーターを、PCIeカード、M.2モジュール、スペース制約のある展開向けの統合コンピューティングボードなど、複数のフォームファクタで提供しています。
Ultralyticsとの統合により、Ultralytics YOLOv8やYOLO26などのサポートされているYOLOモデルを、Ultralytics Python packageを使用してAxelera形式にエクスポートし、Voyager SDKを通じて最適化できます。このSDKは、効率的なエッジ推論のためのコンパイルとINT8量子化を処理します。
図3. Axelera AIのMetis AI Processing Unit (ソース)
Link to this section消費電力を考慮に入れる#
消費電力は、発熱や冷却要件に直接影響するため、エッジ展開における重要な制約でもあります。これは、システムが密閉された筐体やコンパクトな産業用ハウジング内で確実に動作できるかどうかを決定します。
これは、モバイルロボット、ドローン、遠隔監視ステーションなどのバッテリー駆動環境では特に重要であり、1ワット(W)の違いが稼働時間とシステム全体の安定性に影響します。
ほとんどのエッジデバイスは、3つの主要な電力階層に分類されます。それぞれの詳細を見ていきましょう:
- 低電力デバイス (<10W): これらは通常、コンパクトなサイズとパッシブ冷却が必要な組み込みシステムで使用されます。
- ミッドレンジデバイス (10–50W): これらのデバイスは、制御された熱制限内で動作しながら、より高いスループットを必要とするエッジゲートウェイや工場のエンドポイントで一般的です。
- 高電力デバイス (>50W): このようなデバイスは通常、マルチカメラ処理や重いワークロード向けに設計されたPCIeアクセラレーターや産業用PCです。これらは多くの場合、アクティブ冷却および大型の筐体と組み合わされます。
ワークロードの特性が、どの電力階層が適切かを決定する上で大きな役割を果たすことに注意することが重要です。より高いフレームレート、より大きなビジョンモデル、および複数の並列カメラストリームはすべて計算需要を増加させ、その結果、消費電力も増加します。
今日では、多くのハードウェアベンダーが電力効率の高いAIアクセラレーションに注力しています。例えば、DEEPXのedgeモジュールは、エッジ展開における低電力推論向けに設計されています。Intelのプロセッサも、環境やワークロードの要件に基づいてパフォーマンスを調整できる電力管理およびスケーリング機能を備えています。
Link to this section産業用としての可用性とライフサイクルサポートを考慮する#
パイロット展開を正常に完了したと仮定しましょう。モデルは良好に動作し、ハードウェアはパフォーマンス要件を満たしており、システムはテスト環境で確実に稼働しています。
次の課題は、そのソリューションを本格的な生産規模に拡大することです。ここで、産業用としての可用性とライフサイクルサポートが不可欠になります。
ほとんどのエッジシステムは、数年間にわたり継続的に稼働することが期待されています。展開直後に供給が終了する可能性のあるハードウェアを選択することは、重大なリスクを伴います。パイロット期間中にデバイスが良好に動作したとしても、生産開始後に製品寿命(EOL)に達したり、調達が困難になったりすると、それが負債となる可能性があります。
短い市場ライフサイクルは、サプライチェーンの混乱を引き起こし、メンテナンスコストを増大させ、予期せぬ再設計を強いることがあります。マルチサイト展開では、利用できないコンポーネントの交換は拡張を遅らせ、システム管理を複雑にします。
産業用として設計されたハードウェアは、通常、より長い生産期間、より明確なライフサイクルポリシー、および継続的なファームウェアやソフトウェアサポートを提供します。この安定性により、ライフサイクル中に大きなハードウェア変更を行うことなく、展開を容易に拡大できます。
エッジデバイスを最終決定する前に、チームはメーカーの製品ロードマップ、ライフサイクルコミットメント、および長期サポート戦略を確認できます。
Link to this sectionチームの専門知識と使いやすさの重要性#
エッジデバイスの選択と展開は、チームの経験にも依存します。一部のプラットフォームは扱いやすく、明確なドキュメント、簡単なセットアップ手順、すぐに使用できるツールを提供します。他のプラットフォームはパフォーマンスをより細かく制御できますが、より深い技術知識を必要とし、最適化やデバッグに多くの時間を費やす必要があります。
例えば、Ultralytics Python packageは、YOLO26のようなモデルのトレーニング、テスト、およびデプロイを簡単にします。一般的なタスクを簡素化し、エッジ展開で使用されるさまざまな形式へのモデルエクスポートもサポートしています。これにより、チームはワークフローをゼロから作り直すことなく、開発から現実世界のハードウェアへ移行しやすくなります。
エッジAIが初めてのチームにとっては、強力でドキュメントが整備されたソフトウェアエコシステムが開発期間を短縮し、展開のリスクを低減できます。より経験豊富なチームは、特にマルチカメラ処理や厳格なレイテンシ要件を必要とするアプリケーションにおいて、より深いカスタマイズと微調整を可能にするプラットフォームを好む場合があります。
簡単に言えば、ベンダーのエコシステムとツールは大きな違いを生み出します。明確なドキュメント、アクティブなサポート、および柔軟な展開オプションは、チームがパイロットプロジェクトから本格的な生産システムへより円滑に移行するのを助けます。
Link to this section見落とされがちな主要なエッジ展開要因#
エッジデバイスの選択に関わる主な要因をカバーしましたので、実際の展開において大きな違いを生む可能性のある実用的な詳細をいくつか説明しましょう。これらの考慮事項は最初は急を要するように見えないかもしれませんが、多くの場合、意思決定において重要な役割を果たし、パイロット段階を超えた後のプロジェクトの円滑な進行を左右します。
Link to this sectionI/O、帯域幅、およびソフトウェアの互換性#
接続性とI/Oの互換性は、エッジ展開における最初の実用的な課題の1つとなることがよくあります。一般的に、エッジデバイスはUSB 3.0、Power over Ethernet (PoE) 対応のGigE、MIPIなどの一般的なインターフェースを含む、カメラやセンサーの構成をサポートする必要があります。
産業用ビジョンシステムでは、信頼性の高い動作を保証するために、ハードウェアトリガー、同期信号、または特定のタイミングサポートが必要になることもあります。
帯域幅は、特にマルチカメラセットアップにおいて重要な要因です。カメラの出力とデバイスの入力容量との間にわずかな不一致があるだけでも、スループットが低下したり、追加のレイテンシが発生したりする可能性があります。
ソフトウェアの互換性も重要な役割を果たします。一部の展開では、モバイルや組み込み環境で一般的に使用されるNCNNやMNNのような軽量な推論フレームワークに依存しています。
スマートセンサーの展開では、Sony IMX500のようなデバイスがAI処理をイメージセンサー上に直接統合し、データ転送とレイテンシを削減します。これらのケースでは、モデルがセンサーのツールチェーンでサポートされている形式に変換される必要があるため、モデルの互換性とエクスポートサポートが特に重要になります。
例えば、Ultralytics Python packageは、Ultralytics YOLO11などのモデルを、Sony IMX500などのデバイスを中心としたプラットフォームを含む、エッジ展開パイプラインと互換性のある形式にエクスポートすることをサポートしています。
Link to this section熱的および環境的信頼性#
エッジデバイスが視覚データを継続的に処理する場合、熱的および環境的信頼性が重要な要因となります。この文脈での信頼性とは、埃、振動、極端な温度などの過酷な条件下でも、過熱や故障することなく、デバイスが長期間稼働できることを意味します。
エッジAIのワークロードがより要求の厳しいものになるにつれて、熱効率がシステム設計の決定的な要因となっています。この熱性能への重点は、CES 2026(ラスベガス)で強調されました。そこでは、DeepXが複数のチップ上で同一のAIワークロードを実行し、その上に小さなバターの塊を置くデモンストレーションを行いました。
競合チップはバターを溶かすほどの熱を発生させましたが、DeepXのエッジデバイスは溶かさず、消費電力の低さと強力な熱安定性が、現実世界の信頼性に直接どのように影響するかを実証しました。
冷却設計は、安定したパフォーマンスを維持する上で中心的な役割を果たします。プロセッサがより激しく動作すると熱が発生し、その熱を効果的に管理する必要があります。
多くの産業現場では、メカニカルファンは時間の経過とともに摩耗したり故障したりする可能性があるため、特に埃の多い環境や振動の激しい環境では、パッシブ冷却が好まれます。ファンレスのアルミニウムヒートシンクは、可動部品に頼らずに熱を放散するためによく使用され、長期的な耐久性を向上させます。
環境条件も影響を与える可能性があります。すべてのデバイスには定格動作温度範囲があり、密閉されたキャビネットや屋外への展開では、熱がこもったり、ハードウェアが変動する温度にさらされたりする可能性があります。これらの場合、筐体設計と空気の流れは、生の計算能力と同じくらい重要になります。
Link to this sectionソフトウェアエコシステムと展開の即時性#
最適なエッジデバイスを選択する際、ソフトウェアエコシステムの強さはハードウェア仕様と同じくらい重要です。デバイスが紙の上では強力な計算パフォーマンスを提供していても、信頼できるツールやプラットフォームのサポートがなければ、プロトタイプから生産への移行が遅く複雑になる可能性があります。
十分にサポートされたプラットフォームは、モデルの準備からターゲットハードウェア上での最適化された推論に至るまで、展開までの道のり全体を合理化します。量子化、パフォーマンスチューニング、およびデバッグ用の組み込みツールを提供するエコシステムは、実際のワークロード下でのモデル検証を容易にし、展開中の予期しない問題を減らします。
例えば、YOLO26のようなUltralytics YOLOモデルは、OpenVINO形式に直接エクスポートでき、Intel CPU、統合GPU、およびニューラル処理ユニット (NPU) 上での最適化された推論を可能にします。OpenVINOは、モデル変換、量子化(FP16およびINT8を含む)、およびサポートされているIntelハードウェア全体でのヘテロジニアス実行といったパフォーマンス最適化を提供します。
Ultralytics Python packageを使用すると、チームはシンプルなコマンドでモデルをエクスポートし、Ultralyticsの高レベルインターフェースを介して、またはネイティブのOpenVINO Runtimeを使用して直接推論を実行でき、Intelベースのエッジシステム向けの効率的で生産準備の整った展開ワークフローを作成できます。
Link to this section負荷時の真のパフォーマンス#
多くエッジデバイスは紙面上では印象的ですが、完全なビジョンパイプラインを実行するとパフォーマンスが変化する可能性があります。実際の展開において、システムは単に推論だけを実行しているわけではありません。
システムは同時に前処理、後処理、時には複数のカメラストリームを処理します。このため、平均フレームレートだけでなく、それ以上の点を確認することが重要です。
一貫したレイテンシは、多くの場合、ピーク時のパフォーマンスよりも重要です。メモリのボトルネックに注意し、安定した負荷の下でシステムがどの程度安定し続けるかを確認することで、本番環境での動作をより明確に把握できます。
コールドスタート時間、数時間にわたる長期的な高パフォーマンス、そしてエンコード、ログ記録、ネットワーキングなどの他のタスクが推論と並行して実行されているときのデバイスの動作をテストすることは有益です。ほとんどの実際のユースケースでは、安定した予測可能なパフォーマンスの方が、時折発生する速度の急上昇よりも重要です。
Link to this sectionセキュリティ、ライフサイクル、およびデプロイ後の管理#
エッジデプロイメントでは、特に製造業のようにシステムが継続的に稼働することが期待される環境において、長期間にわたって安全かつ信頼性を維持する必要があります。セキュアブート、暗号化ストレージ、定期的なベンダーアップデートなどの機能は、改ざんからデバイスを保護し、脆弱性や予期しないダウンタイムのリスクを軽減するのに役立ちます。
デプロイ後のデバイス管理は、適切なハードウェアを選択することと同じくらい重要です。リモート監視およびアップデート機能により、チームは各デバイスに物理的にアクセスすることなく、ソフトウェア、ファームウェア、モデルを維持できます。これは、プロジェクトが小規模なパイロットから大規模なロールアウトへと移行するにつれて、ますます重要になります。
デプロイメントが拡大するにつれて、一元化されたフリート管理がすべてを整理するのに役立ちます。これにより、チームはデバイスの健全性の追跡、アップデートの管理、パフォーマンスの監視、および複数の拠点にわたる問題のトラブルシューティングが容易になります。明確な管理戦略がなければ、数十台から数百台ものエッジシステムの維持はすぐに困難になります。
Link to this sectionコンピュータビジョンとエッジAIの一般的な実世界のアプリケーション#
適切なエッジデバイスを選択する際に関与する要素を検討する中で、これらのシステムが実際にどこで使用されているのか疑問に思うかもしれません。今日、エッジAIは製造や小売からロボティクスやスマートインフラに至るまで、ほぼすべての業界でアプリケーションを強化しています。
エッジデバイスが低レイテンシ、帯域幅消費の削減、信頼性の高いオンデバイス処理を実現する、5つの一般的なディープラーニングのユースケースを以下に示します。
- 産業現場における安全監視: エッジコンピューティングハードウェアにデプロイされたコンピュータビジョンパイプラインは、個人用保護具(PPE)のコンプライアンスに関する即時アラートを提供できます。つまり、作業者がヘルメット、手袋、安全ベスト、ゴーグルなどの必要な安全装備を着用しているかどうかを自動的に検出し、安全でない行動を特定します。これにより、現場で機密性の高いビデオデータを安全に処理しながら、職場での事故を減らすことで運用上の信頼性が向上します。
- 小売アナリティクス: エッジデバイスは、在庫管理、棚の空き状況、行列検出のために視覚データをローカルで処理でき、帯域幅とクラウドコストを削減しながら、多くの店舗で費用対効果が高くスケーラブルな状態を維持します。
- ロボティクス: ロボティクスにおいて、オンデバイスAIはリアルタイムの物体検出と自律ナビゲーションを可能にします。例えば、NVIDIA Jetsonエッジデバイスは、ロボットがYOLO26のようなコンピュータビジョンモデルをローカルで実行できる、GPU加速されたコンパクトなコンピューティングプラットフォームを提供し、電力効率を維持しながら低レイテンシのパフォーマンスを実現します。
- スマートシティと交通監視: スマートシティのデプロイメントでは、リアルタイムの交通流分析、インシデント検出、歩行者の安全監視のためにエッジコンピュータビジョンプロセッサを使用できます。クラウドへの継続的なビデオストリーミングを回避することで、これらのシステムは帯域幅の要件を削減し、応答時間を改善します。
- 製造業における品質検査: 生産ラインでは、エッジデバイスが製品をリアルタイムで検査し、アイテムがコンベアを下流へ移動する前に欠陥、部品の欠落、または組み立てエラーを検出できます。これらのシステムは、スループットと電力の制約に応じて、CPU、GPU、または専用のAIアクセラレータ上でYOLO26のようなモデルを実行できます。
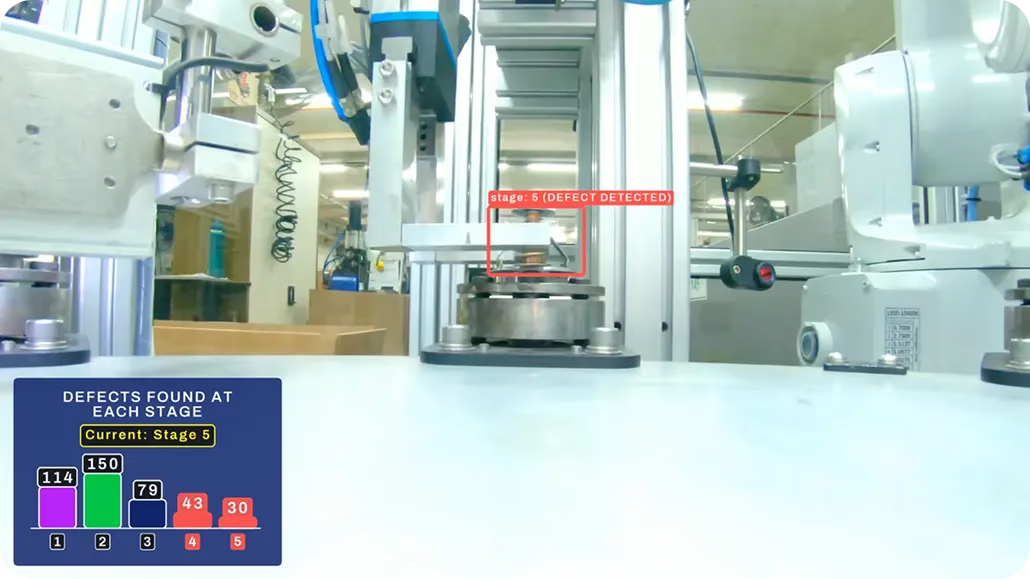
図4. YOLO26は、製造工場で欠陥を検出するためにエッジにデプロイできます。
Link to this section重要なポイント#
コンピュータビジョンプロジェクトに適したエッジデバイスを選択するには、パフォーマンス、電力効率、信頼性、および長期的な可用性のバランスを取る必要があります。チームは、ピーク時の仕様だけに注目するのではなく、実際の条件、ソフトウェアエコシステムの成熟度、およびライフサイクルサポートを評価する必要があります。パイロットデプロイメントでセットアップを検証してからスケールアップすることで、リスクを軽減し、コストを管理し、プロトタイプから本番環境へのよりスムーズな道のりを確実にすることができます。
私たちのコミュニティに参加し、GitHubリポジトリをご覧ください。農業におけるAIやヘルスケアにおけるコンピュータビジョンなど、さまざまなアプリケーションを紹介しているソリューションページもぜひチェックしてください。ライセンスオプションを確認し、今すぐビジョンAIを始めましょう!






