生物多様性を守る:Ultralytics YOLOv5とYOLOv8によるKashmir World Foundationの成功事例
野生生物の保護と密猟防止のためのKashmir World FoundationによるAIとYOLOv5の活用を探ります。

Kashmir World Foundation (KWF) は、世界規模での野生生物保護と保全の戦いに最新技術を導入するという使命を掲げ、2008年にバージニア州グレートフォールズで設立されました。KWFは、その保全活動や密猟対策を支援する自律型無人システムを構築・運用しています。2013年、KWFは運用にAIの導入を開始しました。
WWF. )によると、生息地の喪失は、「レッドリスト」に記載され、絶滅危惧種や危急種に分類される全種の85%にとって、最大の存亡の危機となっています。同時に、伝統薬や珍味、エキゾチックペットとして使用するための野生動物の密猟需要も高まっており、報告によると増加傾向にあります。生息地の喪失と密猟は一体となって世界的な生物多様性を脅かし、地域社会や環境に壊滅的な影響を与えています。
強力な内部連携を挙げて、創設者兼エグゼクティブディレクターのAliyah Pandolfiは、「世界中の学生、学者、エンジニア、科学者たちが、自分の時間と専門知識をボランティアとして提供してくれています」と説明します。KWFは100%世界中のボランティアによって運営されています。KWFはその活動を通じて、カタールのスナネコ、コスタリカのウミガメ、ヒマラヤのユキヒョウなど、脅かされている数多くの絶滅危惧種の保護において大きな前進を遂げました。
「私たちは皆、動物を愛しているからこそこれを行っています。しかしそれ以上に重要なのは、私たちのスキルを活かして世界のために良いことをし、そうでなければ生き残れなかったかもしれない種のために前向きな変化をもたらしたいということです。」 Aliyah Pandolfi, 創設者兼エグゼクティブディレクター, Kashmir World Foundation
Link to this section密猟問題との戦い#
多くの場合、密猟が発生する場所へ保護活動家がアクセスすることは非常に困難です。KWFは、世界の僻地における保全活動で4つの主要な障壁に直面しています。
- 危険な気象パターン
- 予測不可能な社会政治的要因
- 厳しい地形
- 常に現場に人員を派遣するためのリソース不足
これまで、保護活動家は現場にビデオ録画装置を設置し、後で映像を確認する方法をとっていました。何百時間、何千時間にも及ぶ映像を確認するこのプロセスは、見る人が細心の注意を払って動物の種と密猟者の両方を検出し、特定することに依存していました。時間の制約やヒューマンエラーのため、このアプローチは保護活動家を不利な立場に置くことが明らかになりました。KWFのボランティアたちは、密猟者や違法な狩猟に対抗するため、より良い装備が必要であると認識していました。

テクノロジーの必然的な進歩は、諸刃の剣として機能します。品質が向上し、よりアクセスしやすくなるにつれて、保護活動家も悪意のある者も、最新のテクノロジーを手にすることができます。競争力を維持するために、保護活動家は最新技術の力を活用し、それを有利に利用する準備をしなければなりません。
Link to this section前進するための創造的な方法#
Pandolfiは、KWFにリアルタイムの情報を提供する、現場での積極的なソリューションを必要としていました。ヒューマンエラーを排除し、4つの主要な障壁に立ち向かうソリューションを求めていた彼女は、密猟対策任務においてはわずか数秒の違いが結果を左右すること、つまりリアルタイムのインサイトが動物の殺害を未然に防ぐことに直結することを理解していました。
創造性を味方に、Pandolfiはこのプロジェクトに必要なテクノロジーとリソースを検討しました。彼女が必要とするテクノロジーの多くは現在利用可能ですが、Pandolfiは近い将来利用可能になるはずのハードウェアやソフトウェアのリリースを見越しています。KWFでチームを率い、ドローン、AI、GPS機能を活用するアプローチを開発しています。

「このプロジェクトの開始当初は、コミュニティから多くの疑念の声が上がりました。クレイジーだ、不可能だ、そんなことはできない、そんな技術は存在しないと言われました。しかし、私は長期的な視点で考えていました。このプロジェクトのためには、計算機科学とドローンの機能が進化し、融合する必要があったのです。」
リスクの高い場所にさまざまなカメラやセンサーを配置することで、KWFは世界中の場所からデータを受け取り、即時の意思決定を行うためのアクション可能なインサイトを得ています。
「もし特定の場所に密猟者がいると想像してみてください」とPandolfiは言います。「私たちは彼らを追跡し、レンジャーに位置を知らせて、動物を殺す前に密猟者を阻止して捕まえられるようにしたいと考えています。」
Link to this sectionなぜYOLOv5なのか?#
リアルタイムの物体検出を必要とするKWFは、モデルの出力が非常に正確で信頼できるものである必要がありました。選択肢を検討する中で、PandolfiのKWF A.I.チームリードである、オランダの学生Daan Eeltinkは、YOLOv4とYOLOv5のパフォーマンスを比較しました。YOLOv5には、KWFのチームがプロジェクトのためにこれを選択する決め手となったいくつかの差別化ポイントがありました。
- YOLOv5モデルは、より少ない画像でのトレーニングで済みました。
- オープンソースであるため、KWFチームにとって技術が非常に利用しやすかった。
- YOLOv5の学習曲線は急ではありませんでした。
KWFは、保護活動に必要な技術を構築するために、世界中のボランティア、エンジニア、インターンのチームに頼っています。インターンの多くは高校生であり、YOLOv5の経験がほとんど、または全くない学生もいます。Pandolfiは、事前の経験が最も少ない学生でさえ、3週間以内にYOLOv5を立ち上げて稼働させることができたのを目の当たりにしました。
さらに、実験追跡プラットフォームとの統合により、モデルとデータセットの微調整が簡単になり、KWFは現場でのYOLOv5モデルのパフォーマンスを最大化することができました。
「YOLOv5は正確で、動物が殺される前に救う手助けをしてくれました。それが私たちの最終的な目標でした。」
YOLOv5がなければ、KWFのチームはフラストレーションを感じただろうとPandolfiは言います。物体検出を導入する前、保全プロジェクトには最適な量のデータが不足していました。2023年初頭、KWFは彼らの作業を、YOLOのビジョンAIアーキテクチャファミリーの最新リリースであるUltralytics YOLOv8へと移行する予定です。
Link to this sectionYOLOv5のデプロイ#
現在、KWFは現場のセンサーでの物体検出にYOLOv5をデプロイしています。これらのデバイスはデータを生物学者に送信し、生物学者はその情報を分析してアクション可能なインサイトを作成することができます。来年には、KWFはドローン画像を含むデータセットでYOLOv5をトレーニングし、その後これらのドローンを現場にデプロイすることを目指しています。
Link to this section保全プロジェクト#
Link to this sectionウミガメ#
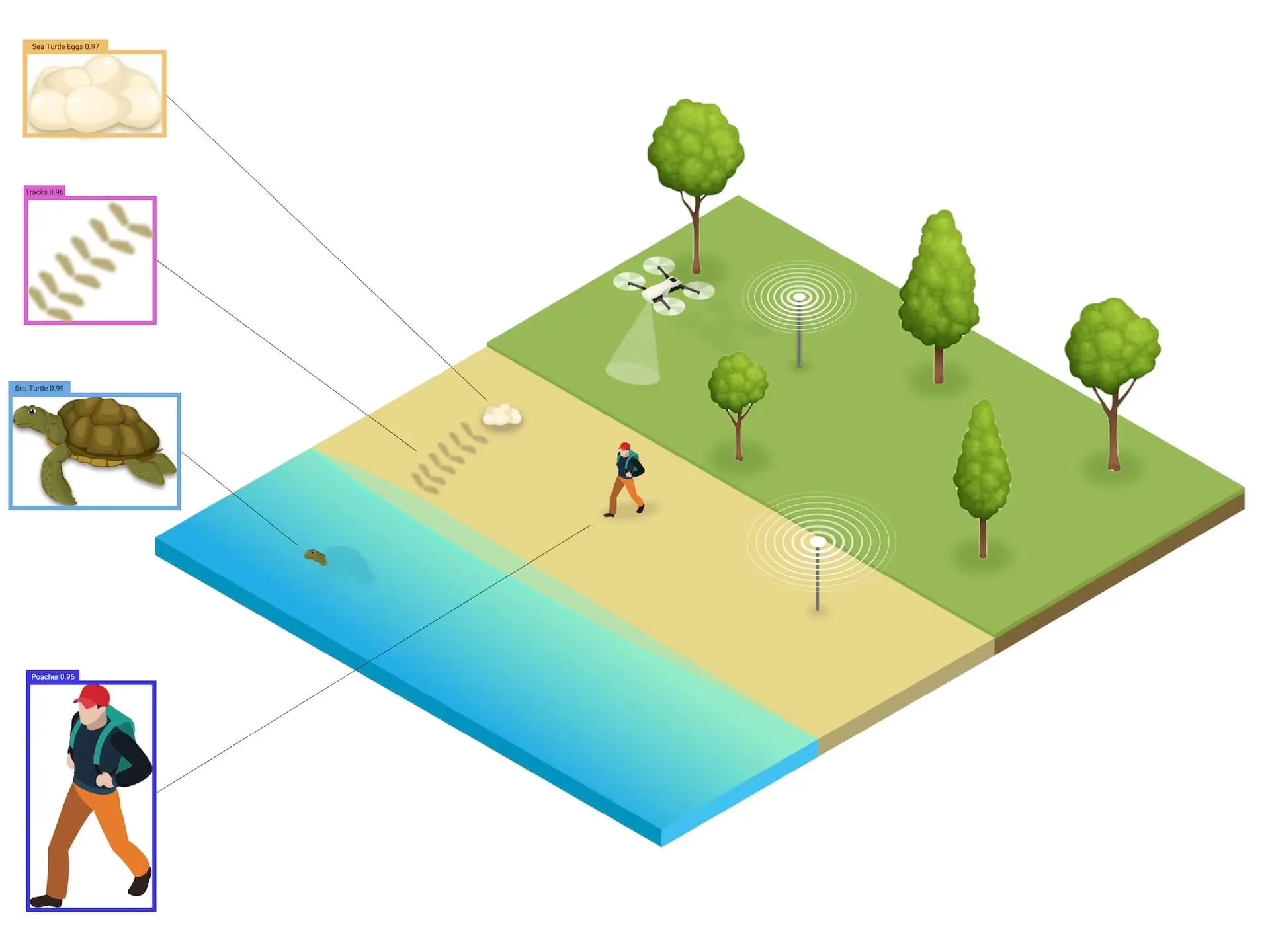
世界には7種類のウミガメが存在し、それぞれが絶滅危惧種と見なされています。産卵の際、メスのウミガメは浜辺に上がり、砂の中に巣を掘って卵を産みます。このプロセスには数時間かかることもありますが、完了するとメスのウミガメは水に戻り、卵を砂の中で55〜65日間孵化させます。母親が去った後、卵は密猟者、捕食者、自然の要素からほとんど守られることなく放置されます。
過去、保護活動家によるウミガメの追跡アプローチは、浜辺の巣がある場所すべてに目印をつけることでした。これらの地域での脅威が高い場合、保護活動家は一時的に巣を安全な場所へ移動させ、孵化後にカメを海に放します。
このプロセスには、30マイル(約48キロ)以上の浜辺を手作業で歩き、巣に目印をつける作業が含まれる可能性があります。毎日このプロセスを実行するために十分な人員を確保することは困難であることが判明しており、特にCOVID-19のロックダウン中はそれが顕著でした。
さらに、ウミガメの巣に目印をつけることは、逆効果になることもありました。密猟者が目印をつけられた巣を探し出せるだけでなく、豚も目印がある場所にウミガメの巣があることを学習し、卵を食べてしまうようになったのです。
KWFは、人手という要因を削減し、容易に識別可能な目印を置き換えることで、このプロセスを改善する機会を見出しました。YOLOv5を使用してウミガメの巣を検出し、位置を特定し、特徴付ける自律型航空システムを設置することで、生物学者はウミガメの足跡や地理的な位置を含む巣に関するリアルタイムの情報を受け取ることができるようになり、生物学者が手作業で浜辺を歩いて目印をつける必要がなくなりました。
Link to this sectionユキヒョウ#
ユキヒョウの厚い白い毛皮と黒い斑点状のロゼット模様は、ヒマラヤの風景に完全にカモフラージュするのに役立ちます。野生では天敵のいない頂点捕食者です。しかし、ファッションや伝統薬における毛皮やその他の身体部位への需要が極めて高いことに加え、生息地の喪失と分断化により、野生のユキヒョウはわずか4,000〜6,500頭しか残っていないと推定されています。
ユキヒョウの保全活動は、それらが生息する過酷な環境に寄与する要因のために、非常に困難であることが判明しています。
- 高地
- 過度の降雪
- 氷点下の気温
- 強風
- 急な渓谷
- 厳しい地形
さらに、野生のユキヒョウを見つけることは非常に稀です。その結果、KWFはドローン技術を活用してこれら大型ネコ科動物を追跡・保護する自動化アプローチを開発しています。現時点では、ユキヒョウの追跡に必要な環境(約20,000〜22,000フィート)で機械が動作できるように、ドローン技術はまだ開発段階にあります。

技術が利用可能になり次第、KWFはYOLOv5をセンサーやドローンに使用し、ヒマラヤにデプロイする予定です。追跡目的で、これらのセンサーとドローンは雪に残された足跡を検出できるようになります。足跡は通常、風ですぐに吹き飛ばされてしまいます。このリアルタイム情報は、生物学者や保護活動家に中継されます。
Kashmir World Foundationのウェブサイトを訪れ、世界中の保全活動においてどのように違いを生み出す手助けができるかを確認してください。






