Ultralytics YOLO26の高速なエッジファースト設計がもたらすインパクト
Ultralytics YOLO26がどのようにエッジで高速化されるか、そしてそれが低遅延と効率性を求める次世代のコンピュータビジョンアプリケーションにとってなぜ重要なのかをご覧ください。
今週初め、UltralyticsはUltralytics YOLO26を正式にリリースしました。これは、エッジにおけるコンピュータビジョンシステムのパフォーマンスを再定義することを目指した、より高速で軽量、かつ小型なYOLOモデルです。YOLO26は、物体検出やインスタンスセグメンテーションなど、従来のYOLOモデルと同様の主要なビジョンタスクをサポートしています。

図1. YOLO26を使用して物体をセグメンテーションする例。
YOLO26と以前のモデルとの決定的な違いは、設計の前提となる環境です。YOLO26は、クラウドのGPUやベンチマーク重視のパフォーマンスを第一に最適化するのではなく、エッジデバイスや組み込みハードウェア上での実運用を前提にゼロから設計されました。
コンピュータビジョンが研究段階からプロダクション段階へと移行するにつれ、パフォーマンスの制約という現実が浮き彫りになっています。エッジ環境は、厳しいレイテンシ要件、限られたメモリ、電力や熱の制約、そして多様なプラットフォーム全体で予測可能な動作が求められるといった課題を抱えています。
このような設定では、システム全体のパフォーマンスは、単なる推論速度だけでなく、パイプライン全体の効率的な動作にも左右されます。ポストプロセッシング(後処理)のオーバーヘッド、メモリ負荷、プラットフォーム固有の実行パスがボトルネックになることが多々あります。
YOLO26は、個別のモデル指標ではなく、推論パイプライン全体を考慮する高速なエッジファーストのアプローチを採用することで、これらの課題に対処しています。エッジ最適化、推論パイプラインの簡素化、そして不必要なポストプロセッシングステップの削除に注力することで、YOLO26はレイテンシを低減し、プロダクション環境においてより信頼性の高い動作を実現する速度向上を提供します。
この記事では、YOLO26のアーキテクチャの選択がどのように実世界のパフォーマンス向上につながるのか、そしてエッジでの高速化が次世代のコンピュータビジョンアプリケーションにどのような可能性をもたらすのかを解説します。
Link to this sectionエッジデプロイメントの現実#
エッジ環境でコンピュータビジョンモデルを実行することは、クラウドでの実行とは大きく異なります。クラウド環境では、システムは通常、強力なGPU、大容量メモリ、安定したハードウェアを利用できます。しかし、エッジでは、そのような前提は当てはまりません。
ほとんどのエッジデプロイメントは、GPUではなく多様なハードウェアアーキテクチャ上で実行されます。デバイスは通常、タスクごとに複数の専用プロセッサを使用しており、これらはクラウドGPUのような生計算能力ではなく、効率と低消費電力に最適化されています。
レイテンシも大きな制約の一つです。エッジシステムは厳しいリアルタイム制限下で動作することが多く、わずかな遅延でも応答性や安全性に影響を及ぼす可能性があります。このような場合、単なる推論速度よりもエンドツーエンドのレイテンシが重要になります。モデルが計算上は速くても、ポストプロセッシングやデータ移動を含めると期待を下回ることがあります。
メモリも大きな役割を果たします。多くのエッジデバイスはメモリが限られており、キャッシュを共有しています。巨大な中間テンソルや非効率なメモリ使用は、モデル自体が効率的であってもシステムを減速させる要因となります。
電力と熱の制限もさらなる制約となります。エッジデバイスは多くの場合、アクティブ冷却なしで、固定された電力予算内で動作します。パフォーマンスは単に短時間のバーストで速いだけでなく、効率的かつ持続可能である必要があります。
さらに、エッジデプロイメントには一貫性が求められます。モデルはデバイスやランタイムをまたいで同様に動作しなければなりません。プラットフォーム固有のコードや複雑なポストプロセッシングステップは、システムのデプロイと維持を困難にする微細な差異を生じさせる可能性があります。
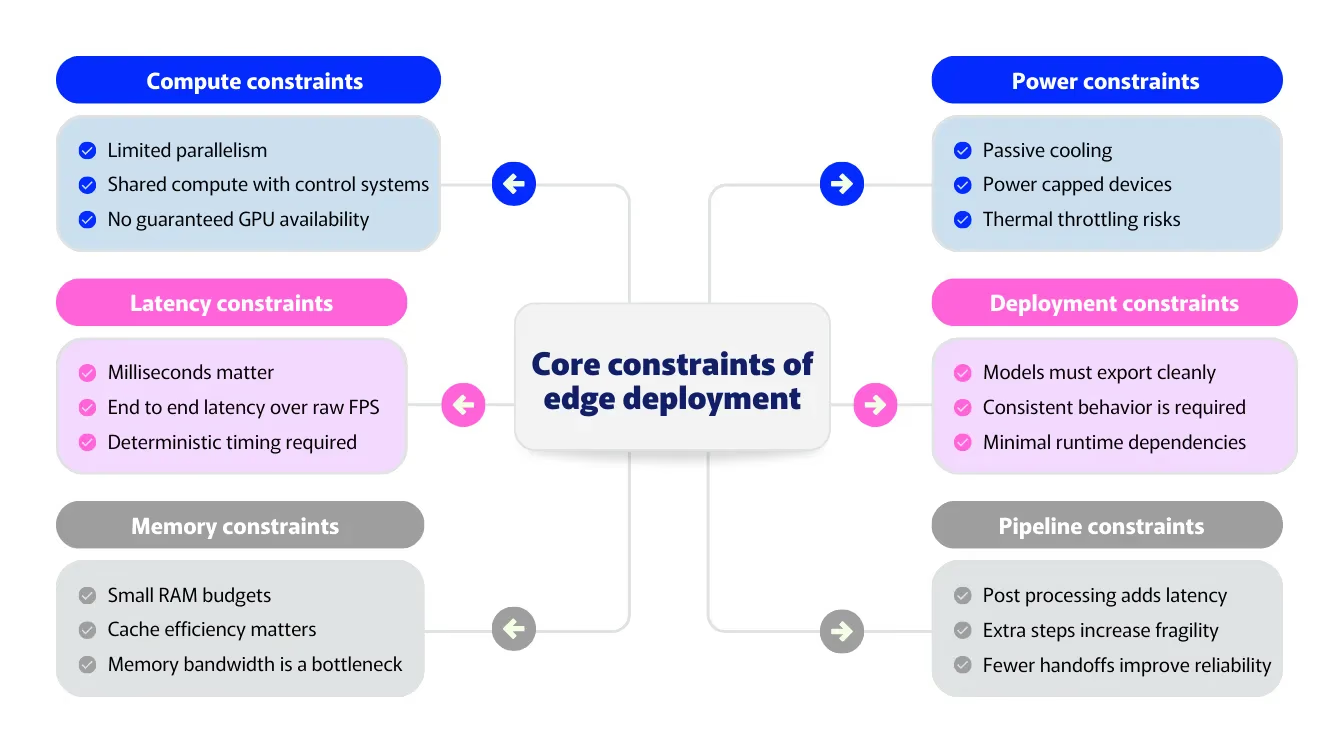
図2. エッジデプロイメントの制約を見る。画像提供:著者。
これらの制約こそが、エッジにおけるパフォーマンスの真の意味を定義しています。つまり、パフォーマンスとは単一の指標ではなく、パイプライン全体によって定義されるのです。
Link to this sectionなぜエッジビジョンには異なるパフォーマンスモデルが必要なのか#
では、エッジデプロイメントの制約は、エッジ向けに構築されたコンピュータビジョンモデルの要件とどのように関連しているのでしょうか。モデルが研究環境から実世界のシステムへと移行すると、その関連性が明確になります。
クラウド環境では、パフォーマンスは推論速度や精度といったベンチマークを使用して測定されることが一般的です。エッジでは、それらの指標だけでは一部の側面しか示せません。ビジョンシステムは通常、異機種混在(ヘテロジニアス)なハードウェア上で動作し、ニューラルネットワークの推論は専用アクセラレータにオフロードされ、他のパイプライン部分は汎用プロセッサで実行されます。
このコンテキストにおいて、モデルの速度だけでは不十分です。モデルがデプロイされた後にシステム全体がどのように機能するかが鍵となります。モデル自体は速く見えても、ポストプロセッシング、データ移動、あるいはプラットフォーム固有のステップによってオーバーヘッドが生じれば、期待に応えられない可能性があります。
これが、エッジビジョンにおいて孤立したベンチマークではなく、システムレベルの効率性に焦点を当てたパフォーマンスモデルが必要とされる理由です。YOLO26は、エッジファーストの最適化、効率化された推論、そして実世界へのデプロイを見据えたエンドツーエンドの実行に重点を置くことで、この転換を反映しています。
Link to this section速度の基礎:エッジファースト設計#
エッジでは、パフォーマンスはモデルがデバイスの実際のハードウェアアーキテクチャにどれだけ適合しているかによって決まります。エッジファーストの設計を行うことで、利用可能な処理ユニットの組み合わせに関係なく、ビジョンシステムが実際のプラットフォーム上で確実に動作することが保証されます。
エッジファーストのアプローチでは、クラウドGPU向けに最適化されたモデルを後付けで調整するのではなく、多様なハードウェア全体での予測可能かつ効率的な実行を優先します。簡単に言えば、ニューラルネットワークアクセラレータにうまく変換できる演算を優先し、モデル外の非ニューラル作業を最小限に抑え、エンドツーエンドの実行を遅延させる不必要な複雑さを排除することを意味します。
YOLO26はこれらの制約を念頭に設計されました。そのアーキテクチャは、理想的な条件下でのピークスループットよりも、一貫したパフォーマンスを重視しています。実行パスを簡素化し、不必要な計算を排除することで、YOLO26は推論パイプライン全体のオーバーヘッドを低減し、デバイスが持つアクセラレーションとメモリ階層をより有効に活用します。
このアプローチは信頼性も向上させます。エッジファーストの最適化は、より予測可能なタイミングとパフォーマンススパイクの抑制をもたらし、これはリアルタイムシステムにおいて不可欠です。専用ハードウェアや重厚なポストプロセッシングに頼って速度を達成するのではなく、YOLO26は推論パイプライン全体での効率性を重視しています。
Link to this sectionエンドツーエンド推論とポストプロセッシングのコスト#
不必要なポストプロセッシングステップを排除することが何を意味するのか、不思議に思うかもしれません。これを理解するために、少し立ち止まって、従来の物体検出システムがどのように動作しているかを見てみましょう。
多くの物体検出パイプラインでは、モデルが予測を出力した時点で推論が終わるわけではありません。モデルは多数の重複するバウンディングボックスを出力し、それらをフィルタリングおよび精緻化してからでないと使用できない場合があります。このクリーンアップは、モデル自体の外側で実行されるポストプロセッシングステップを通じて行われます。
最も一般的なポストプロセッシングステップの一つがNon-Maximum Suppression(NMS)です。NMSは重複するバウンディングボックスを比較し、最も確信度の高い検出結果のみを残して、同じ物体を指す重複分を削除します。このアプローチは効果的ですが、推論完了後に余分な計算を発生させます。
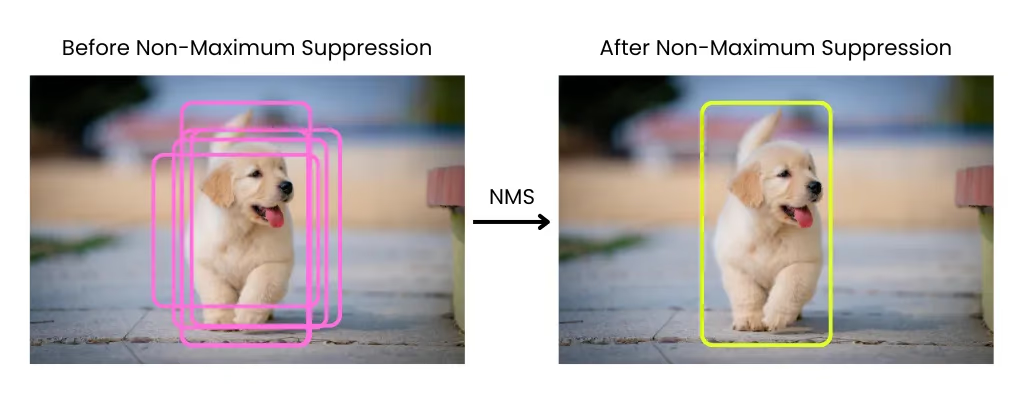
図3. NMSの理解。画像提供:著者。
エッジでは、この余分な作業にコストがかかります。NMSのようなポストプロセッシングステップは、ニューラルネットワーク推論に使用される専用アクセラレータには適していません。これらは、複雑な制御やメモリ集約型の操作よりも、高密度なニューラル計算に最適化されているためです。
結果として、NMSは追加のレイテンシとメモリオーバーヘッドを発生させ、検出数が増えるほどそのコストは増大します。モデル自体が速くても、NMSが合計ランタイムのかなりの部分を消費してしまうことがあります。
また、ポストプロセッシングはシステムの複雑性を増大させます。モデル外で処理されるため、ランタイムやハードウェアターゲットごとに別々に実装する必要があります。これは多くの場合、プラットフォーム固有のコードパス、デバイス間での動作の不一致、デプロイパイプラインの脆弱化につながります。
最も重要な点は、ポストプロセッシングが真のエンドツーエンドのパフォーマンスという概念を壊していることです。モデルの推論速度を測定しても、プロダクション環境でシステムがどのように動作するかは反映されません。最終的に重要なのは、パイプラインのあらゆるステップを含む、入力から最終出力までの合計時間です。
こうした状況では、ポストプロセッシングはエッジにおける隠れたボトルネックとなります。モデル自体の外側に存在しながら、レイテンシを追加し、CPUリソースを消費し、デプロイを複雑にします。
Link to this sectionYOLO26がNMSを排除した理由と、それが高速化をもたらす仕組み#
YOLO26はNMSを排除しています。推論後に重複をクリーンアップするのではなく、重複検出の根本原因に対処するためです。フィルタリングが必要な重複予測を多数生成する代わりに、モデルは確信度の高い最終的な検出結果の小セットを直接生成するようにトレーニングされています。
これは、トレーニング中の検出学習方法を変更することで実現されています。YOLO26は、物体と予測の間のより明確な1対1の関係を促進し、ソースでの冗長性を削減します。その結果、重複検出は外部のポストプロセッシングではなく、ネットワーク自体の中で解決されます。
NMSの削除は、エッジパフォーマンスに即座に影響を与えます。NMSはニューラルネットワークアクセラレータとうまくマッピングできないため、これを排除することでメモリ移動が削減され、コストのかかる非ニューラル処理ステップが回避されます。これによりエンドツーエンドのレイテンシが短縮され、特にポストプロセッシングが合計ランタイムの大部分を消費しがちなエッジデバイスにおいて、パフォーマンスの予測可能性が高まります。
また、推論パイプラインの簡素化も実現します。モデル外のステップが減ることで、データ移動が減り、コンポーネント間の引き継ぎも少なくなります。モデルの出力がそのまま最終結果となるため、実行がより予測可能になります。
Link to this section真のエンドツーエンドのパフォーマンスを実現するためのDFLの削除#
YOLO26のもう一つのイノベーションは、以前のYOLOモデルでバウンディングボックス回帰に使用されていたDistribution Focal Loss(DFL)の削除です。DFLを使用していたモデルでは、単一の座標を直接予測するのではなく、可能な値の分布を学習し、その分布から最終的なバウンディングボックスを導き出していました。このアプローチはローカライゼーション精度の向上に寄与し、前世代における重要な進歩でした。
しかし、時間が経つにつれてDFLはトレードオフももたらすようになりました。分布の予測は計算量を増加させ、モデルアーキテクチャの複雑性を増大させます。これはCPUでの推論を遅延させ、デプロイ形式へのエクスポートを困難にする要因となります。また、DFLは固定された回帰範囲を課すため、非常に大きな物体を検出する際の柔軟性を制限する可能性がありました。
YOLO26は、よりシンプルでエンドツーエンドな設計を目指す一環としてDFLを削除しました。バウンディングボックス回帰はより直接的になるよう再設計され、精度を維持しつつ不必要な計算を削減しています。この変更は、YOLO26のNMSフリーのアプローチと合致しています。
Link to this sectionCPU推論が43%高速化した理由#
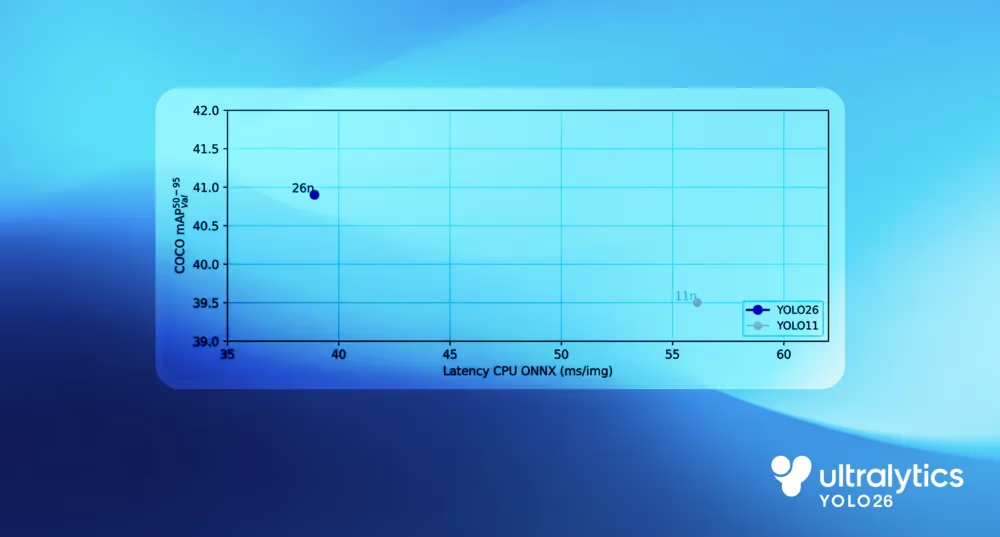
CPUベースのベンチマークにおいて、YOLO26は以前のYOLOモデルと比較して明確なパフォーマンス向上を示しています。Ultralytics YOLO11と比較して、YOLO26 nanoモデルは最大43%高速なCPU推論を実現しており、これは現実のエッジデプロイメントにおいて非常に有意義な差となります。
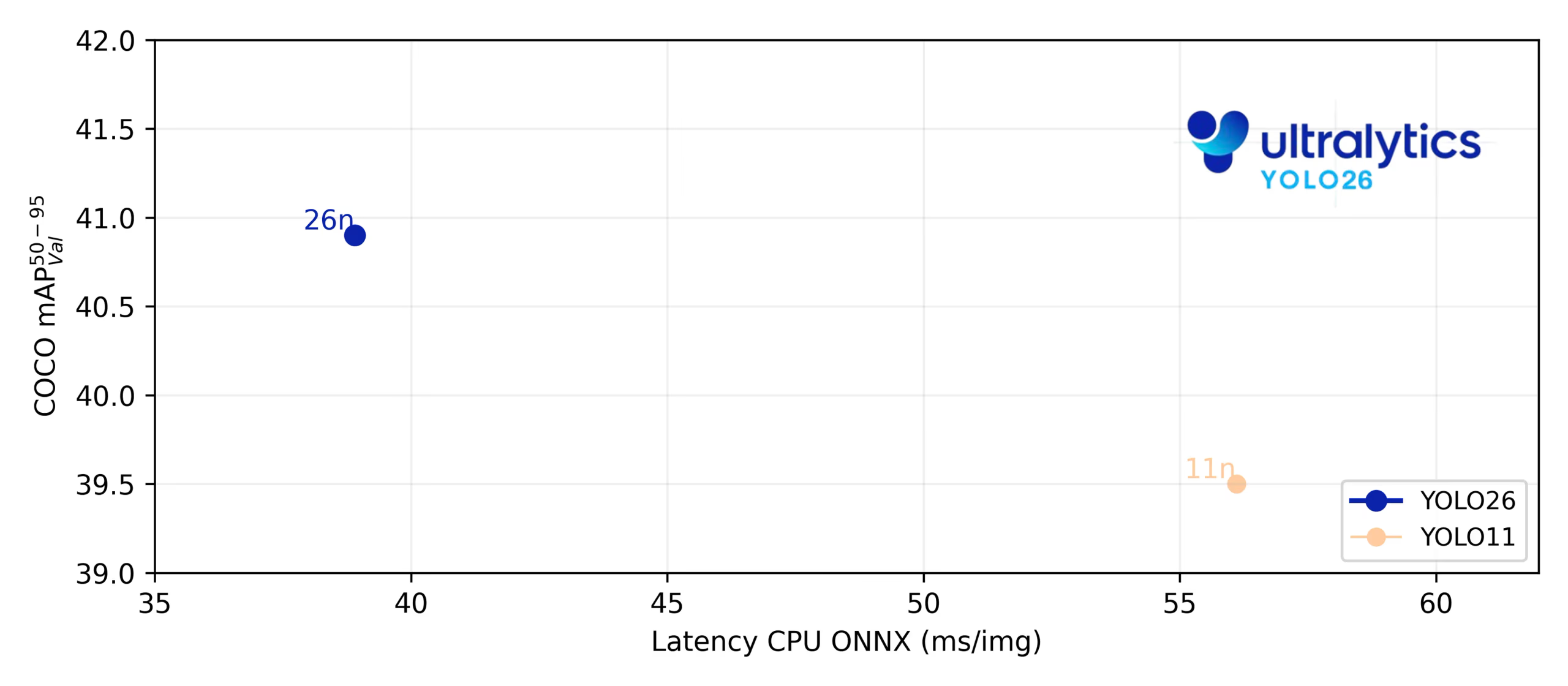
図4. YOLO26のCPU速度ベンチマーク。
この向上は、単一のコンポーネントを最適化するのではなく、推論パイプライン全体を簡素化することによって得られています。エンドツーエンドの実行によりポストプロセッシングのオーバーヘッドが排除され、より直接的なバウンディングボックス回帰手法によって計算量が減り、CPUファーストの設計選択が汎用プロセッサ上での実行効率を向上させています。
これらの変更を総合すると、レイテンシが短縮され、CPUの作業負荷が軽減され、現実のエッジハードウェア上でのより高速で一貫したパフォーマンスにつながります。
Link to this sectionYOLO26がエッジデプロイメントとエクスポートに与える影響#
YOLO26のパフォーマンス向上は、推論の高速化にとどまりません。モデルを簡素化しメモリオーバーヘッドを低減することで、エッジ環境全体でのデプロイが容易になり、動作の信頼性が向上します。
YOLO26のエンドツーエンド設計は、エクスポートも簡素化します。補助的なコンポーネントが少なく、外部のポストプロセッシングステップも存在しないため、エクスポートされたモデルは完全に自己完結しています。これによりプラットフォーム固有の依存関係が減り、ランタイムやハードウェアターゲットをまたいでの一貫した動作を確保しやすくなります。
実際に、これはYOLO26をカメラ、ロボット、組み込みシステムなどのエッジデバイスに、さまざまなエクスポート形式を使用してより簡単にデプロイできることを意味します。エクスポートしたものがそのまま実行され、統合ステップやデプロイ後の乖離のリスクが低減されます。
Link to this sectionエッジ推論の高速化がロボティクスと産業用ビジョンAIを可能にする#
これまでに、YOLO26のエッジファースト設計がシステムレベルでどのようにパフォーマンスを向上させるかを見てきました。しかし、真の影響は、ビジョンAIを現実世界のアプリケーションへより容易に統合できるようになった点にあります。
例えば、ロボティクスや産業環境では、ビジョンシステムは厳しいリアルタイム制約下で動作することがよくあります。限られた計算資源を使用し、クラウド接続に頼らずに、迅速かつ一貫した意思決定を行う必要があります。Ultralytics YOLO26を使用すれば、これらの要件を満たすことが現実的になります。
ロボットのナビゲーションや物体の操作といったアプリケーションは、より低いレイテンシとより予測可能な推論の恩恵を受け、ロボットが環境の変化にスムーズに応答できるようになります。同様に産業環境では、ビジョンモデルを生産ライン上で直接実行して、遅延や複雑さを追加することなく、欠陥の検出、コンポーネントの追跡、プロセスの監視を行うことができます。
エッジハードウェア上での高速かつ信頼性の高い推論を可能にすることで、YOLO26はビジョンAIをデプロイや維持の課題とするのではなく、ロボティクスや産業システムにおける自然な構成要素へと変えていきます。
Link to this section重要なポイント#
YOLO26は、レイテンシ、メモリ、信頼性といった現実世界の制約が可能性を定義するエッジ環境のために構築されました。CPUファーストの実行、エンドツーエンド推論、そしてよりシンプルなデプロイを前提としてモデルを設計することで、YOLO26はビジョンAIを現実のシステムに統合可能な実用的なものにしています。このエッジファーストのアプローチは、パフォーマンスと予測可能性が最も重視されるロボティクスや産業用ビジョンから、組み込みおよびオンデバイスAIに至るまで、幅広いアプリケーションを実現します。
成長を続ける私たちのコミュニティに参加し、実践的なAIリソースについてはGitHubリポジトリを探索してください。今日からビジョンAIを構築するために、ライセンスオプションを確認してください。ソリューションページにアクセスして、農業におけるAIがどのように農業を変革しているか、またヘルスケアにおけるビジョンAIがどのように未来を形作っているかを学びましょう。






