指向性バウンディングボックス(OBB)検出とは何か?
指向性バウンディングボックス(OBB)検出が、実世界のアプリケーションにおいて画像内の回転したオブジェクトを正確に識別することで、どのように物体検出を強化するかを探求します。
人間にとって、対象物がどのように配置され、どちらを向いているかに関わらず、それを認識することは自然なことです。交差点にある車であれ、港にある船であれ、それが何であり、どの方向を向いているかを容易に見分けることができます。しかし、人工知能 (AI) システムにとって、それはそれほど単純なことではありません。
例えば、画像や動画の理解に特化したAIの一分野であるコンピュータビジョンは、物体検出のようなタスクを可能にし、機械がシーン内の物体を識別して特定するのを助けます。従来の物体検出は、軸に沿ったバウンディングボックスを使用して物体の周囲を囲みます。これらのボックスは直線的な辺を持ち、直角に固定されています。このアプローチは、物体が直立しており、互いに接近しすぎていない場合にうまく機能します。
しかし、物体が傾いていたり、回転していたり、互いに密集していたりする場合、従来の物体検出では正確に捉えるのが難しいことがよくあります。こうしたより複雑な状況に対応するために、指向性バウンディングボックス (OBB) 検出のような手法が導入されました。標準的なバウンディングボックスとは異なり、OBBは物体の角度や形状に合わせて回転できるため、よりタイトで正確なフィットが可能になります。
OBB検出をサポートするUltralytics YOLO11のようなコンピュータビジョンモデルは、特に航空監視など、物体の向きが重要となるシナリオにおいて、幅広いリアルタイムアプリケーションを実現します。それだけでなく、OBB検出はヘルスケア、農業、文書解析にも使用されています。
本記事では、OBB検出とは何か、その仕組み、そして現実世界のどのようなシナリオで応用されているのかを解説します。それでは始めましょう!

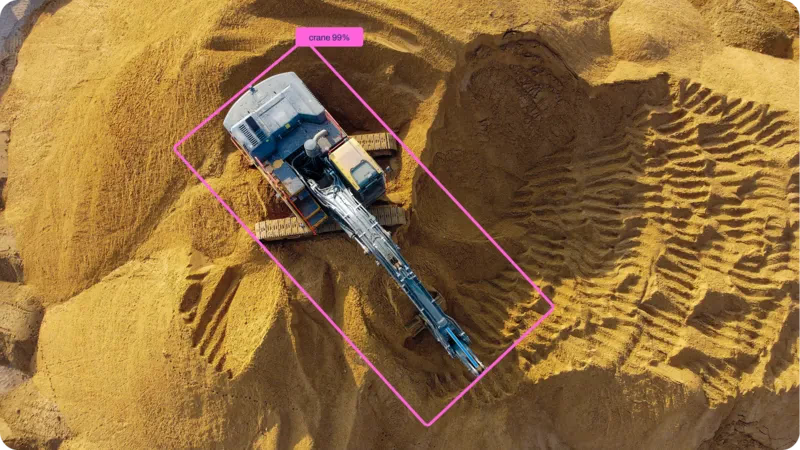
Fig 1。船のOBB検出にYOLO11を使用したデモの例。
Link to this section指向性バウンディングボックスとは何か?#
指向性バウンディングボックスは、画像内で検出された物体を表現するためにコンピュータビジョンで使用される長方形のボックスの一種です。標準的なバウンディングボックスは画像の水平軸および垂直軸に合わせて配置されますが、OBBは物体の実際の角度に合わせて回転させることができます。
この回転能力は、いくつかの利点をもたらします。OBBは物体の向きに密接に合わせることができるため、物体の形状や方向に沿ってボックスをタイトに適合させることができます。その結果、検出がより正確かつ精密になります。
OBBは、航空映像でカーブした道路を曲がる車、デスク上の傾いた本、医療スキャンで回転した腫瘍など、物体が完全に直立していない場合に特に役立ちます。OBBは物体の角度をより正確に一致させることで、検出性能を向上させ、背景の干渉を減らします。また、位置と同じくらい物体の向きが重要となるアプリケーションにおいて非常に優れています。
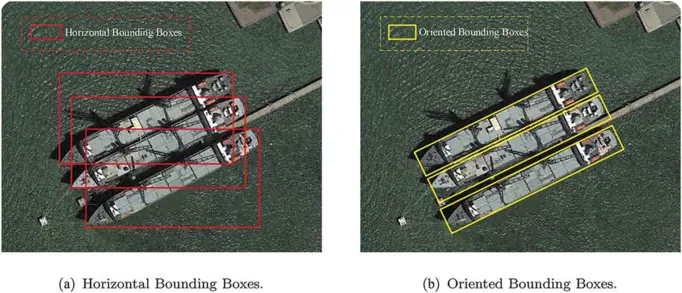
Fig 2。物体検出とOBB検出の比較。
Link to this sectionOBB検出と物体検出の比較#
OBB検出と従来の物体検出は、一見似ているように見えるかもしれませんが、それぞれ異なる方法で、異なる状況のために使用されます。例を挙げて、それらがどのように比較されるかを詳しく見てみましょう。
YOLO11のようなコンピュータビジョンモデルは、産業検査のような様々な現実世界のアプリケーションにおいて、物体を検出・分類するようにトレーニングできます。工場内の組立ラインで、異なる機械部品がコンベアベルト上を移動している様子を想像してください。一部の部品はきれいに配置されているかもしれませんが、振動や速度のために回転していたり、傾いていたり、重なっていたりするものもあるでしょう。
従来の物体検出では、画像の水平軸および垂直軸に沿った直立した長方形のボックスを使用します。そのため、部品が回転していると、ボックスが正しく適合せず、物体の一部を除外したり、逆に背景を多く含みすぎたりすることがあります。これにより、検出の精度が低下し、システムが部品を確実に識別するのが難しくなる可能性があります。
次に、代わりにOBB検出を使用している場合を考えてみましょう。この場合、モデルは各部品の正確な角度に合わせて回転するボックスを描画できます。傾いたギアや角度のついた部品は、その形状と方向にぴったりと収まるボックスによってタイトに囲まれます。これは、特に自動化された品質管理やロボットによる仕分けのようなユースケースにおいて、精度の向上、エラーの減少、そしてより信頼性の高い結果を意味します。
Link to this section主要なOBB検出モデル#
OBB検出とは何かを理解したところで、それをサポートする最も広く使用されているVision AIモデルをいくつか見てみましょう。
回転または傾いた物体を検出するために、いくつかの高度なコンピュータビジョンモデルが特別に開発されてきました。その中でも、Ultralytics YOLOモデルは、信頼性が高く効率的なOBB検出機能で特に知られています。
Ultralytics YOLOv5のような初期のバージョンは、標準的な物体検出向けに設計されていました。その後のイテレーションであるUltralytics YOLOv8や、より新しいYOLO11は、OBB検出に対するネイティブサポートを導入しました。特にYOLO11は、速度を犠牲にすることなく最先端の精度を提供し、リアルタイムアプリケーションにとって影響力のある選択肢となっています。
YOLO11n-obbなどの事前学習済みYOLO11 OBBモデルは、様々な角度や向きで現れる飛行機、船、テニスコートなどの多種多様な物体クラスでアノテーションされた航空画像から成るDOTAv1のようなデータセットで学習されています。
また、これらのモデルはナノ(n-obb)からエクストララージ(x-obb)まで5種類のサイズが用意されており、異なるパフォーマンスニーズに対応できます。この汎用性により、都市インフラの監視や機械の検査から、スキャンされた文書内の斜めのテキストの読み取りまで、様々な業界で応用することが可能です。
Link to this section指向性バウンディングボックス検出のためのYOLO11のカスタムトレーニング#
多くの現実世界の状況では、検出する必要のある物体が、標準的なトレーニングデータセットのものとは完全に異なる場合があります。例えば、生産ライン上の工具、製品パッケージ、回路基板上のコンポーネントなどは、回転していたり、不規則に配置されていたり、異なる形状をしていたりすることがあります。
これらのカスタムオブジェクトを、特に向きが重要となる場合に正確に検出するには、独自の画像とラベルを使用してYOLO11のようなモデルをトレーニングすることが重要です。このプロセスはカスタムトレーニングとして知られています。
YOLO11をOBB検出用にトレーニングするステップバイステップのプロセスを詳しく見ていきましょう。
- 画像収集: ターゲットとなる物体を、異なる角度、位置、および現実世界の環境から撮影した画像を集めます。
- 物体アノテーション: OBBサポートを備えたアノテーションツールを使用して、各物体の位置と向きの両方を捉えるために、回転バウンディングボックス(OBB)を用いてラベル付けします。
- データセット準備: 画像とラベルをYOLOディレクトリ構造に整理し、クラス名とデータセットパスを含むYAML設定ファイルを作成します。
- モデルトレーニング: ニーズに合ったYOLO11モデルのバージョンを選択し、モデルがラベル付けされた画像から学習できるようにトレーニングプロセスを実行します。
- 評価とデプロイ: トレーニングしたモデルを新しい画像でテストし、その精度を評価した上で、製造、航空監視、文書解析などの実用的なアプリケーションにデプロイします。
Link to this sectionOBB検出によって実現されるアプリケーション#
中心から外れていたり、傾いていたりする物体は、実際のシナリオではよくあることです。OBB検出がこれらの物体を正確に検出することで、どのように大きな違いを生むか、いくつか例を見てみましょう。
Link to this sectionOBB検出を用いたX線画像解析#
OBB検出は、精度を向上させることで医療画像解析を一段と進歩させることができます。医療画像には、腫瘍、臓器、骨などの解剖学的構造が含まれることがよくあります。これらの構造は、不規則な形状や様々な向きで現れることが多いです。OBBは物体の角度に合わせて回転できるため、診断や治療計画に不可欠な、より正確なローカリゼーションと測定を提供します。
このアプローチは、特に骨折のX線画像の解析において効果的です。そこでは骨の位置と整列状態が重要な要因となります。例えば、OBB検出は小児肘X線の解析に使用されています。骨の向きに合わせて調整することで、検出精度の向上に貢献しました。
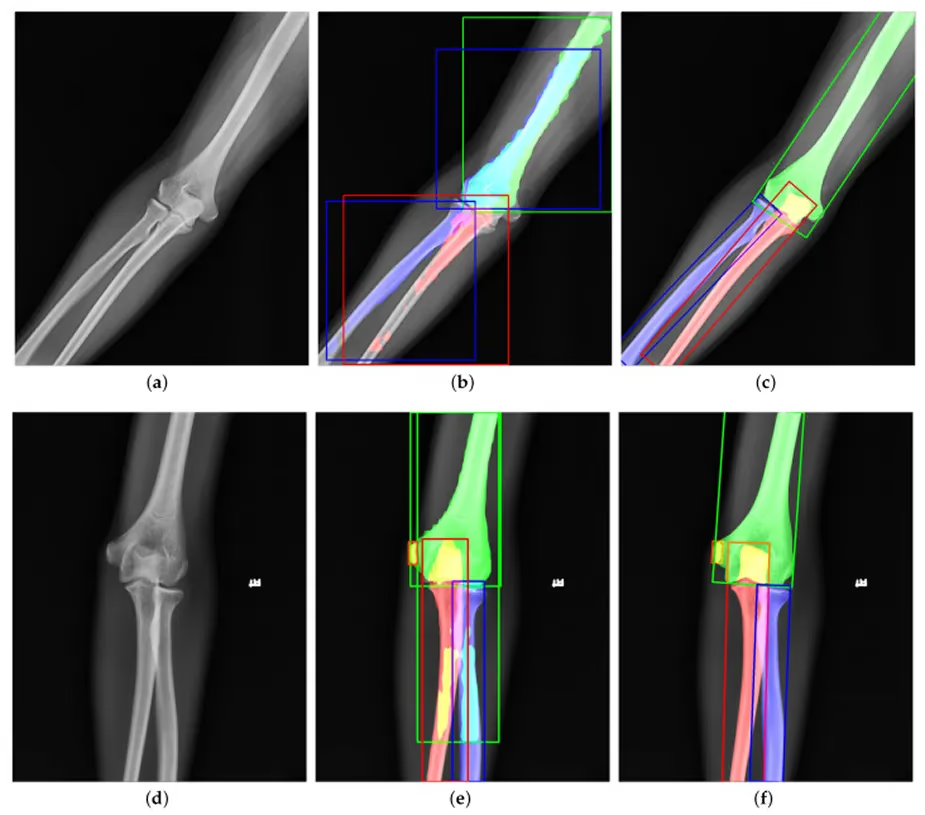
Fig 3。X線 (a, d) の物体検出 (b, e) および指向性バウンディングボックス検出 (c, f)。
Link to this sectionOBB検出による航空監視#
航空監視は、公共の安全、環境モニタリング、都市計画などの分野において不可欠なツールです。ドローンや衛星によって撮影された画像は、船、車両、建物などの物体を識別するのに役立ちます。しかし、これらの画像では、物体は小さく、不自然な角度で映っていることが多いため、正確に検出するのがより困難です。
OBB検出は、バウンディングボックスを傾けて各物体の角度に合わせることでこれを解決します。これにより、物体のサイズと向きの測定精度が向上し、都市計画、防衛、災害対応、環境モニタリングなどの分野におけるより良い意思決定をサポートします。
OBB検出の興味深い例として、海上監視における船舶追跡があります。衛星画像では、天候、照明、または動きのために、船が様々な角度やサイズで捉えられることがよくあります。OBBはこれらの変化に適応でき、特に小型または部分的に隠れた船舶の検出精度を向上させます。

Fig 4. 海上監視におけるOBB検出の使用に関する概観。
Link to this section農業におけるOBB検出の活用#
収穫後の作物の仕分けは、梱包されて市場に出荷される前に品質を保証するための重要なステップです。リンゴやオレンジのような丸い果物には多くのシステムがうまく機能しますが、ニンジンやマコモダケの茎のような長くて細い作物の取り扱いははるかに難しい場合があります。それらの形状は様々であり、異なる角度で配置されることが多いため、正確に検出して仕分けるのが困難です。
これに対処するため、研究者たちは指向性バウンディングボックス (OBB) 検出を使用してこれらの作物を等級分けするシステムを開発しました。このシステムは、傾いていたり重なっていたりする場合でも、1つの画像内の複数の作物を検出し、その品質と位置をリアルタイムで評価できます。
Link to this sectionOBB検出の長所と短所#
OBB検出を使用することの利点をいくつか挙げます:
- 下流タスクへの入力向上: インスタンスセグメンテーションや物体追跡のようなコンピュータビジョンタスクは、より正確な物体検出結果を与えることで、より良いパフォーマンスを発揮できます。
- 空間推論の強化: OBBは向きの角度を捉えることで、物体の整列状態や方向を理解することを可能にします。
- 混雑したシーンでの重複の削減: OBBは、忙しいシーンや雑然としたシーンであっても、物体をよりタイトに囲むことで曖昧さを軽減します。
複雑なシーンでの検出精度の向上に役立ちますが、OBB検出には考慮すべきいくつかの制限があります:
- ノイズに対する感度が高い: 角度予測における小さな誤差が、特に密集した物体や細長い物体の場合、検出精度に大きな影響を与える可能性があります。
- 専門的なツールが必要: すべてのラベル付けおよびトレーニングプラットフォームがネイティブでOBBをサポートしているわけではないため、扱うには追加のツールやセットアップが必要になる場合があります。
- データセットの入手可能性が限られている: 標準的な物体検出と比較して、現時点でOBBアノテーションが利用可能な公開データセットは少なく、開始したり結果を比較したりすることが少し難しくなる場合があります。
Link to this section重要なポイント#
指向性バウンディングボックス検出により、コンピュータビジョンソリューションが完全に真っ直ぐではない、あるいは整列していない物体を認識することが容易になります。物体の位置と向きの両方を捉えることで、OBB検出は医療画像の走査、農地の監視、衛星写真の解析など、現実世界のユースケース全体で精度を向上させます。
YOLO11のようなモデルがOBB検出をより身近なものにしていることで、多くの業界にとって実用的な選択肢になりつつあります。傾いている物体、重なっている物体、あるいは奇妙な形状の物体を扱う場合であっても、OBB検出は標準的な手法では見落とされがちな精度の余分なレイヤーを追加します。
AIについて興味がありますか?コンピュータビジョンのプロジェクトを始めるために、私たちのGitHubリポジトリを探索し、コミュニティと繋がり、ライセンスオプションを確認してください。小売業界のAIや物流業界のコンピュータビジョンといったイノベーションについての詳細は、ソリューションページをご覧ください。






