Ultralytics YOLO11を使用してOBB物体検出を行う方法
Ultralytics YOLO11がどのようにして傾き物体検出(OBB)を用いた物体検出を強化できるか、そしてこのコンピュータビジョンタスクがどのようなアプリケーションに最適であるかを解説します。
Ultralytics’ annual hybrid event, YOLO Vision 2024 (YV24), focused on discussing the latest breakthroughs in AI and computer vision. This was the perfect occasion to introduce our newest model, Ultralytics YOLO11. The model supports the same computer vision tasks as Ultralytics YOLOv8, making the shift to the new model effortless for users.
これまでYOLOv8を使用して、様々な角度から物体を検出するための指向性バウンディングボックス(OBB)物体検出を行っていたとします。現在は、コードを少し変更するだけでYOLO11に切り替えることができ、精度や効率の向上から処理速度に至るまで、YOLO11の改善点のメリットを享受できます。まだYOLO11のようなモデルを使用したことがない場合、OBB検出はYOLO11がどのように適用できるかを示す素晴らしい例であり、実際にインパクトを与える実用的なソリューションを提供します。
本記事では、OBB物体検出とは何か、どこに応用できるのか、そしてYOLO11を使用してOBBを検出する方法について解説します。また、YOLO11の新機能がどのようにこれらのプロセスを改善できるか、さらにそのOBB検出機能を最大限に活用するために、どのように推論を実行し、カスタムモデルをトレーニングするかについても順を追って説明します。
Link to this section次世代のYOLO11には、OBB物体検出のようなタスクが含まれています#
OBB物体検出は、従来の物体検出をさらに発展させ、さまざまな角度にある物体を検出します。画像の軸に沿った通常の境界ボックスとは異なり、OBBは物体の向きに合わせて回転します。OBB物体検出は、物体が必ずしも直立していない航空写真や衛星画像の分析に使用できます。都市計画、エネルギー、交通といった業界では、建物、車両、あるいはインフラストラクチャといった角度のある物体を正確に検出する能力が、具体的なメリットをもたらすコンピュータビジョンアプリケーションの基盤となり得ます。
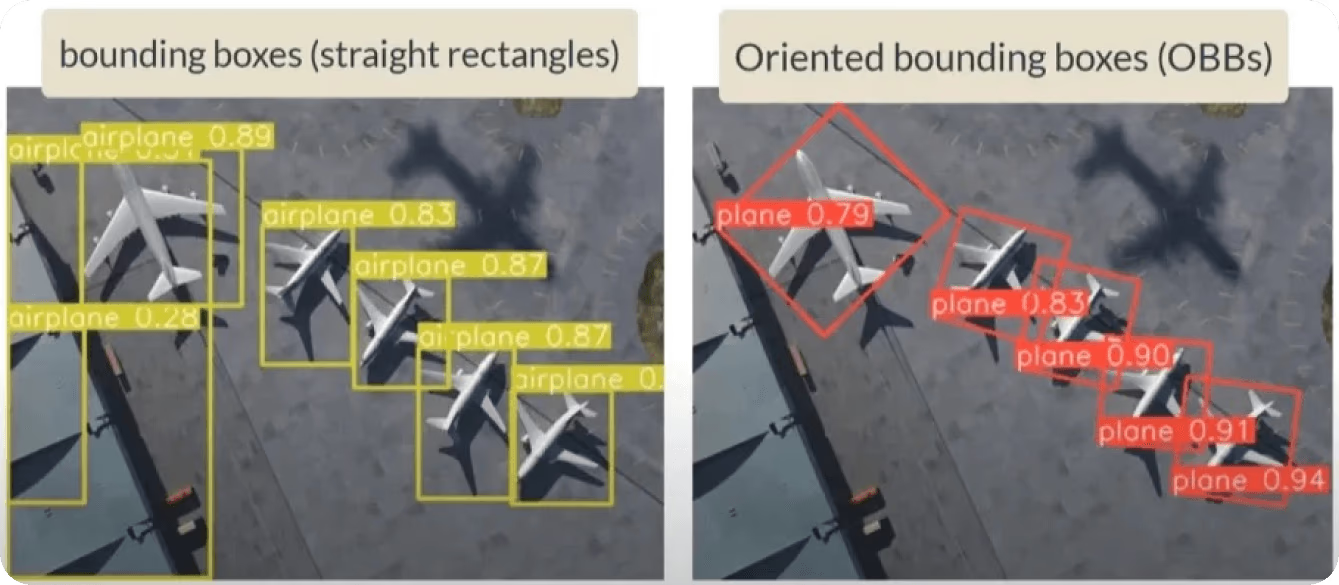
図1 通常のバウンディングボックスと指向性バウンディングボックスの比較。
YOLO11はOBB検出をサポートしており、DOTA v1.0データセットでトレーニングされ、飛行機、船舶、貯蔵タンクなどを様々な視点から検出します。YOLO11には、いくつかのモデルバリエーションがあり、YOLO11n-obb(Nano)、YOLO11s-obb(Small)、YOLO11m-obb(Medium)、YOLO11l-obb(Large)、YOLO11x-obb(Extra Large)など、ニーズに合わせて選択可能です。各モデルはサイズが異なり、速度、精度、計算能力のレベルも様々です。ユーザーは、自身のアプリケーションにおいて速度と精度の最適なバランスを提供するモデルを選択できます。
Link to this section検出に新たな視点をもたらすYOLO11のユースケース#
YOLO11の物体検出能力、特に指向性バウンディングボックスのサポートは、様々な業界にさらなる精度をもたらします。次に、YOLO11とOBB検出を実世界の状況でどのように活用し、様々な分野においてプロセスをより効率的、正確、かつ管理しやすくできるか、いくつかの例を見ていきましょう。
Link to this sectionYOLO11による都市計画とインフラ監視#
都市の設計やレイアウトに見惚れたことがあるなら、それは都市計画とインフラ監視の緻密な作業の賜物です。インフラ監視の多くの側面の一つは、貯蔵タンク、パイプライン、工業用地といった重要な構造物を特定し、管理することです。YOLO11は、都市計画家が航空写真を分析し、これらの重要な要素を迅速かつ正確に検出するのに役立ちます。
指向性バウンディングボックス物体検出は、航空画像でよくあるような、様々な角度から見た物体の検出を可能にするため、この分野で特に役立ちます。工業地帯を追跡し、環境への影響を管理し、インフラが適切に維持されていることを確認するには、精度が不可欠です。OBBは検出プロセスをより信頼性の高いものにし、計画家が都市の成長、安全性、持続可能性について情報に基づいた意思決定を行う手助けをします。YOLO11を使用することで、計画家は都市が円滑に機能し続けるために必要なインフラを監視および管理できるようになります。

図2. 航空映像で貯蔵タンクを検出するためにYOLO11を使用。
Link to this sectionドローン、YOLO11、およびエッジAIによるソーラーパネルの検査#
再生可能エネルギーやソーラーファームのような技術革新が普及するにつれ、定期的な検査の重要性が増しています。ソーラーパネルが効率的に機能しているかを確認する必要があります。時間が経つと、亀裂、汚れの蓄積、配置のずれなどが性能を低下させる可能性があります。日常的な点検は、これらの問題を早期に発見し、円滑な運用を維持するためのメンテナンスを行うのに役立ちます。
例えば、ソーラーパネルは、エッジAIが統合されたドローンとYOLO11を使用して損傷がないか検査できます。エッジで画像を分析することで、検査プロセスにさらなる精度と効率がもたらされます。ドローンの移動と視点のために、監視映像ではソーラーパネルが様々な角度から撮影されることがよくあります。このような場合、YOLO11のOBB検出により、ドローンはソーラーパネルを正確に識別できます。
Link to this sectionYOLO11はフリート管理のためのインサイトを提供できる#
港湾では毎週数百隻の船舶が取り扱われており、これほど大規模な船隊を管理するのは困難な場合があります。航空写真で船舶を分析する際はさらに難易度が上がります。なぜなら、船舶はしばしば様々な角度で映るからです。ここでYOLO11のOBB検出サポートが役立ちます。
OBB検出により、モデルは標準的な長方形のボックスよりも正確に、様々な角度の船舶を検出できます。OBBを伴うYOLO11を使用することで、海運会社はフリートの位置と状態をより簡単に特定でき、フリートの移動やサプライチェーン物流などの重要な詳細を追跡できます。このようなビジョンを活用したソリューションは、ルートの最適化、遅延の削減、海運ルート全体のフリート管理の改善に役立ちます。

図3. YOLO11を使用して角度のある船舶や港湾を検出。
Link to this sectionAI開発者向けYOLO11:指向性バウンディングボックスの検出#
OBB検出にYOLO11を使用したいAI開発者には、開始するための2つの簡単なオプションがあります。コードを扱うことに慣れている場合は、Ultralytics Pythonパッケージが最適な選択です。クラウドトレーニング機能付きの、ユーザーフレンドリーなノーコードソリューションを好む場合は、Ultralytics HUBがまさにそのために設計されたインハウスプラットフォームです。詳細については、Ultralytics HUBを使用してUltralytics YOLO11をトレーニングおよびデプロイする方法に関するガイドをご覧ください。
YOLO11のOBBサポートが適用できる例を確認したところで、次にUltralytics Pythonパッケージを探索し、それを使用して推論の実行およびカスタムモデルのトレーニングを行う方法を見ていきましょう。
Link to this sectionYOLO11を使用した推論の実行#
まず、PythonでYOLO11を使用するには、Ultralyticsパッケージをインストールする必要があります。好みや環境に応じて、pip、conda、またはDockerを使用してインストールできます。詳細な手順については、Ultralyticsインストールガイドを参照してください。インストール中に問題が発生した場合は、共通の問題ガイドが役立つトラブルシューティングのヒントを提供します。
Ultralyticsパッケージをインストールしたら、YOLO11の操作は非常に簡単です。推論の実行とは、学習済みモデルを使用して新しい画像に対して予測を行うプロセスを指します(リアルタイムでOBBを使って物体を検出するなど)。これは、新しい物体を認識するようにモデルを教えたり、特定のタスクでの性能を向上させたりするモデルトレーニングとは異なります。推論は、モデルを未知のデータに適用したい場合に使用されます。
以下の例では、モデルをロードし、画像上の指向性バウンディングボックスを予測するために使用する方法を説明します。より詳細な例や高度な使用のヒントについては、ベストプラクティスや詳細な指示について、公式のUltralyticsドキュメントを必ず確認してください。
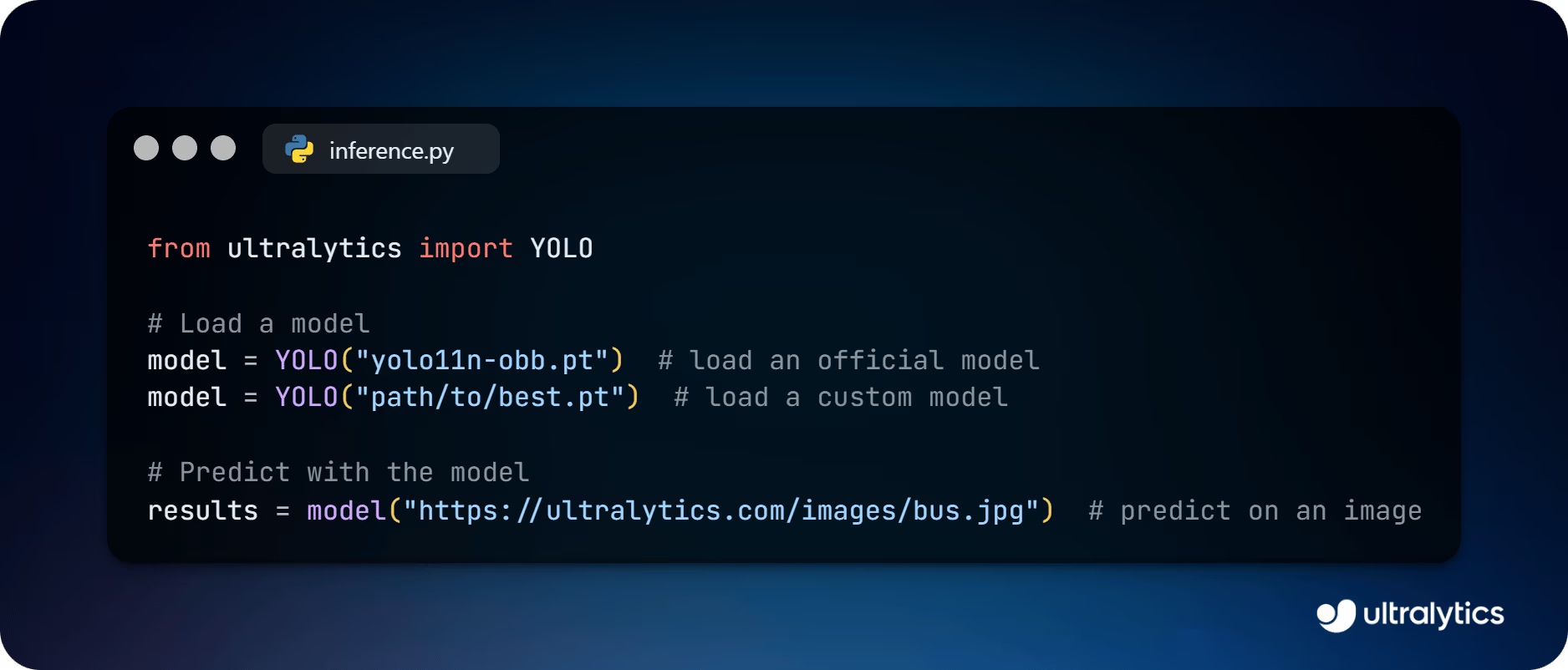
図4. YOLO11を使用した推論の実行を紹介するコードスニペット。
Link to this sectionカスタムYOLO11モデルのトレーニング#
Training a YOLO11 model means you can fine-tune its performance on specific datasets and tasks, such as oriented bounding box object detection. While pre-trained models like YOLO11 can be used for general object detection, training a custom model is essential when you need the model to detect unique objects or optimize performance on a specific dataset.
以下のコードスニペットでは、OBB検出用のYOLO11モデルをトレーニングする手順を網羅しています。
First, the model is initialized using pre-trained YOLO11 OBB-specific weights (yolo11n-obb.pt). Then, a training function is used to train the model on a custom dataset, with parameters such as the dataset configuration file, the number of training cycles, the training image size, and the hardware to run the training on (e.g., CPU or GPU). After training, the model's performance is validated to check metrics such as accuracy and loss.
Using the trained model, you can run inferences on new images to detect objects with OBB and visualize them. Also, the trained model can be converted to formats like ONNX for deployment using the export feature.
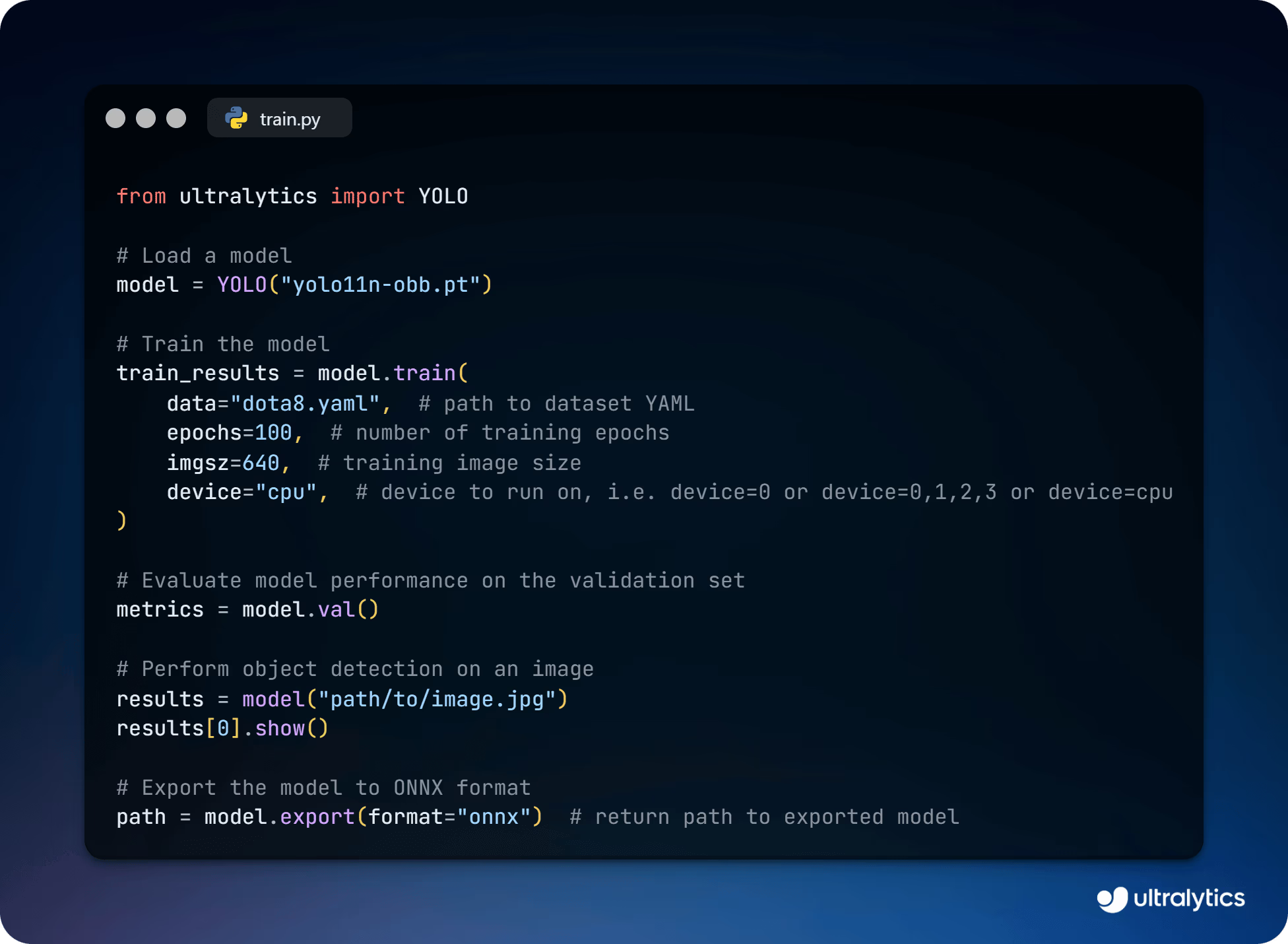
図5. OBB物体検出のためのYOLO11トレーニング例。
Link to this sectionYOLO11のAI進化への道#
Ultralytics YOLO11は、指向性バウンディングボックスのサポートにより、物体検出を次のレベルに引き上げます。様々な角度の物体を検出できることで、YOLO11は異なる業界の様々なアプリケーションで使用できます。例えば、都市計画、エネルギー、海運といった、ソーラーパネル検査やフリート監視などのタスクにおいて精度が不可欠な業界には最適です。より高速なパフォーマンスと向上した精度により、YOLO11はAI開発者が実世界の課題を解決する一助となります。
AIがより広く採用され、私たちの日常生活に統合されるにつれ、YOLO11のようなモデルがAIソリューションの未来を形作っていくでしょう。
ビジョンAIの可能性について学ぶには、拡大を続ける当社のコミュニティに参加し、GitHubリポジトリをご覧ください。私たちは、ヘルスケアから自動運転車に至るまで、様々な分野を再発明することでイノベーションを推進しています。






