Explorando vários tipos de dados para aplicações de visão AI
Descubra como tipos de dados visuais, como imagens térmicas, LiDAR e imagens infravermelhas, viabilizam diversas aplicações de visão computacional em vários setores.

Tecnologia como drones costumava ser limitada e acessível apenas a pesquisadores e especialistas, mas hoje em dia, hardware de ponta está se tornando mais acessível a um público mais amplo. Essa mudança está transformando a forma como coletamos dados visuais. Com tecnologias mais acessíveis, agora podemos capturar imagens e vídeos de uma variedade de fontes, além das câmeras tradicionais.
Paralelamente, a análise de imagens, viabilizada pela visão computacional, um ramo da inteligência artificial (IA), está evoluindo rapidamente, permitindo que máquinas interpretem e processem dados visuais de forma mais eficaz. Esse avanço abriu novas possibilidades para automação, detecção de objetos e análise em tempo real. As máquinas agora conseguem reconhecer padrões, rastrear movimentos e compreender entradas visuais complexas.
Alguns tipos principais de dados visuais incluem imagens RGB (Vermelho, Verde, Azul), que são comumente usadas para reconhecimento de objetos, termografia, que ajuda a detectar assinaturas de calor em condições de baixa luminosidade, e dados de profundidade, que permitem às máquinas entender ambientes 3D. Cada um desses tipos de dados desempenha um papel vital no fortalecimento de várias aplicações de visão com IA, desde vigilância até imagens médicas.
Neste artigo, exploraremos os principais tipos de dados visuais usados na visão com IA e como cada um contribui para melhorar a precisão, eficiência e desempenho em diversos setores. Vamos começar!
Link to this sectionO tipo mais comum de datasets de imagem e vídeo para IA#
Tipicamente, quando você usa um smartphone para tirar uma foto ou visualizar filmagens de CFTV, você está trabalhando com imagens RGB. RGB significa vermelho, verde e azul, e são os três canais de cor que representam informações visuais em imagens digitais.
Imagens e vídeos RGB são tipos de dados visuais intimamente relacionados usados em visão computacional, ambos capturados usando câmeras padrão. A principal diferença é que as imagens capturam um único momento, enquanto os vídeos são uma sequência de quadros que mostram como as coisas mudam ao longo do tempo.
Imagens RGB são geralmente usadas para tarefas de visão computacional como detecção de objetos, segmentação de instâncias e estimativa de pose, suportadas por modelos como Ultralytics YOLO11. Essas aplicações dependem da identificação de padrões, formas ou características específicas em um único quadro.
Vídeos, por outro lado, são essenciais quando movimento ou tempo são fatores importantes, como no reconhecimento de gestos, vigilância ou rastreamento de ações. Como os vídeos podem ser considerados uma série de imagens, modelos de visão computacional como o YOLO11 os processam quadro a quadro para entender o movimento e o comportamento ao longo do tempo.
Por exemplo, o YOLO11 pode ser usado para analisar imagens ou vídeos RGB para detectar ervas daninhas e contar plantas em campos agrícolas. Isso aprimora o monitoramento das plantações e ajuda a rastrear mudanças ao longo dos ciclos de crescimento para um gerenciamento agrícola mais eficiente.

Fig 1. O YOLO11 pode detectar e contar plantas para um monitoramento mais inteligente das plantações.
Link to this sectionDados de profundidade na visão com IA: LiDAR e percepção 3D#
Dados de profundidade adicionam uma terceira dimensão às informações visuais ao indicar a que distância os objetos estão da câmera ou sensor. Ao contrário das imagens RGB que apenas capturam cor e textura, os dados de profundidade fornecem contexto espacial. Eles mostram a distância entre os objetos e a câmera, tornando possível interpretar o layout 3D de uma cena.
Esse tipo de dado é capturado usando tecnologias como LiDAR, visão estéreo (usando duas câmeras para imitar a percepção de profundidade humana) e câmeras de Tempo de Voo (medindo o tempo que a luz leva para viajar até um objeto e voltar).
Dentre eles, o LiDAR (Light Detection and Ranging) é frequentemente o mais confiável para medição de profundidade. Ele funciona enviando pulsos de laser rápidos e medindo quanto tempo levam para retornar. O resultado é um mapa 3D altamente preciso, conhecido como nuvem de pontos, que destaca a forma, posição e distância dos objetos em tempo real.
Link to this sectionO papel crescente do LiDAR em sistemas de visão com IA#
A tecnologia LiDAR pode ser dividida em dois tipos principais, cada um projetado para aplicações e ambientes específicos. Aqui está uma visão mais detalhada de ambos os tipos:
- LiDAR Aéreo: Tipicamente usado para mapear grandes áreas, os scanners LiDAR aéreos são montados em drones ou aeronaves para capturar dados de alta resolução para mapeamento topográfico em larga escala. É ideal para pesquisar terrenos, florestas e paisagens.
- LiDAR Terrestre: Esse tipo de dado LiDAR é coletado de sensores montados em veículos ou plataformas fixas para aplicações como monitoramento de infraestrutura, construção e mapeamento interno. Ele fornece dados altamente detalhados para áreas menores e localizadas, sendo útil para tarefas como planejamento urbano e levantamento de estruturas específicas.
Uma aplicação impactante de dados LiDAR ocorre em veículos autônomos, onde desempenha um papel fundamental em tarefas como detecção de faixa, prevenção de colisões e identificação de objetos próximos. O LiDAR gera mapas 3D detalhados e em tempo real do ambiente, permitindo que o veículo veja objetos, calcule sua distância e navegue com segurança.
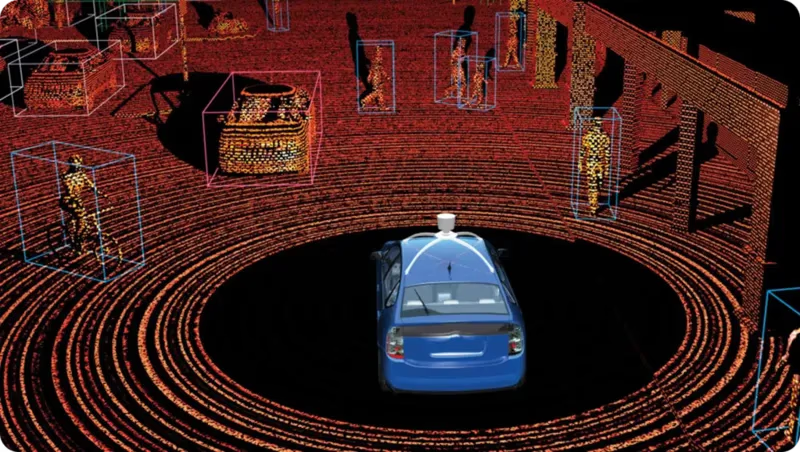
Fig 2. A tecnologia LiDAR permite que veículos autônomos mapeiem profundidade e detectem objetos.
Link to this sectionUsando dados térmicos e infravermelhos em aplicações de IA#
Imagens RGB capturam o que vemos no espectro de luz visível; no entanto, outras tecnologias de imagem, como a termografia e a imagem infravermelha, vão além disso. A imagem infravermelha captura luz infravermelha emitida ou refletida por objetos, tornando-a útil em condições de baixa luminosidade.
A termografia, por outro lado, detecta o calor emitido por objetos e mostra diferenças de temperatura, permitindo que funcione na escuridão total ou através de fumaça, neblina e outras obstruções. Esse tipo de dado é particularmente útil para monitorar e detectar problemas, especialmente em setores onde mudanças de temperatura podem sinalizar potenciais problemas.
Um exemplo interessante é o uso da termografia para monitorar componentes elétricos em busca de sinais de superaquecimento. Ao detectar diferenças de temperatura, câmeras térmicas podem identificar problemas antes que resultem em falha de equipamento, incêndios ou danos dispendiosos.
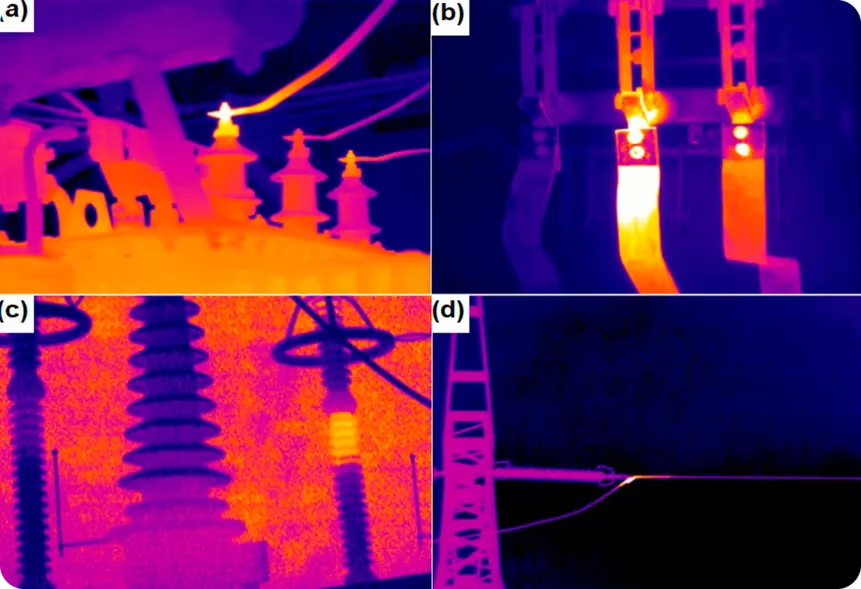
Fig 3. Um exemplo de termografia sendo usada para monitorar componentes elétricos.
Da mesma forma, imagens infravermelhas podem ajudar a detectar vazamentos em tubulações ou isolamentos ao identificar diferenças de temperatura que indicam gases ou fluidos escapando, o que é crucial para prevenir situações perigosas e melhorar a eficiência energética.
Link to this sectionImagem multiespectral e hiperespectral na IA#
Embora a imagem infravermelha e térmica capture aspectos específicos do espectro eletromagnético, a imagem multiespectral coleta luz de algumas faixas de comprimento de onda selecionadas, cada uma escolhida para um propósito específico, como detectar vegetação saudável ou identificar materiais de superfície.
A imagem hiperespectral leva isso um passo adiante ao capturar luz em centenas de faixas de comprimento de onda muito estreitas e contínuas. Isso fornece uma assinatura de luz detalhada para cada pixel na imagem, oferecendo uma compreensão muito mais profunda de qualquer material sendo observado.
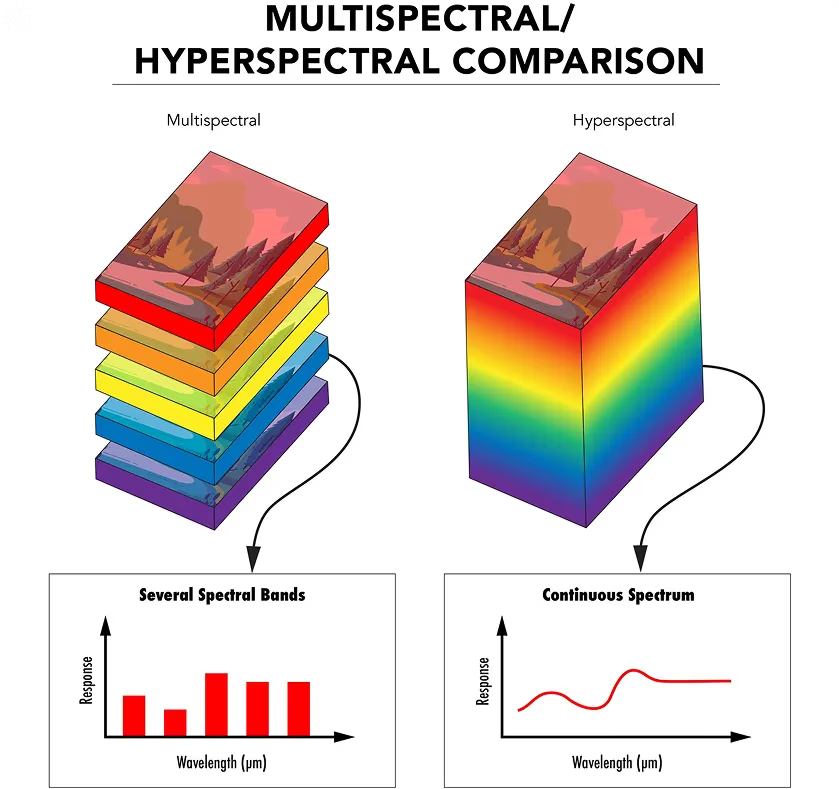
Fig 4. Comparando imagem multiespectral e hiperespectral.
Tanto a imagem multiespectral quanto a hiperespectral usam sensores e filtros especiais para capturar luz em diferentes comprimentos de onda. Os dados são então organizados em uma estrutura 3D chamada cubo espectral, com cada camada representando um comprimento de onda diferente.
Modelos de IA podem analisar esses dados para detectar características que câmeras comuns ou o olho humano não conseguem ver. Por exemplo, em fenotipagem de plantas, a imagem hiperespectral pode ser usada para monitorar a saúde e o crescimento de plantas detectando mudanças sutis em suas folhas ou caules, como deficiências de nutrientes ou estresse. Isso ajuda pesquisadores a avaliar a saúde das plantas e otimizar práticas agrícolas sem a necessidade de métodos invasivos.
Link to this sectionAnalisando imagens de radar e sonar usando IA#
Imagens de radar e sonar são tecnologias que detectam e mapeiam objetos enviando sinais e analisando seus reflexos, de forma semelhante ao LiDAR. Ao contrário da imagem RGB, que depende de ondas de luz para capturar informações visuais, o radar usa ondas eletromagnéticas, tipicamente ondas de rádio, enquanto o sonar usa ondas sonoras. Tanto sistemas de radar quanto de sonar emitem pulsos e medem o tempo que o sinal leva para retornar de um objeto, fornecendo informações sobre sua distância, tamanho e velocidade.
A imagem de radar é especialmente útil quando a visibilidade é ruim, como durante neblina, chuva ou à noite. Como não depende de luz, ela pode detectar aeronaves, veículos ou terrenos na escuridão total. Isso torna o radar uma escolha confiável na aviação, monitoramento climático e navegação autônoma.
Em comparação, a imagem de sonar é comumente usada em ambientes subaquáticos onde a luz não consegue chegar. Ela usa ondas sonoras que viajam pela água e ricocheteiam em objetos submersos, permitindo a detecção de submarinos, mapeamento de fundos oceânicos e a execução de missões de resgate subaquático. Avanços em visão computacional estão agora permitindo um aprimoramento adicional da detecção subaquática ao combinar dados de sonar com análises inteligentes para uma detecção e tomada de decisão melhoradas.
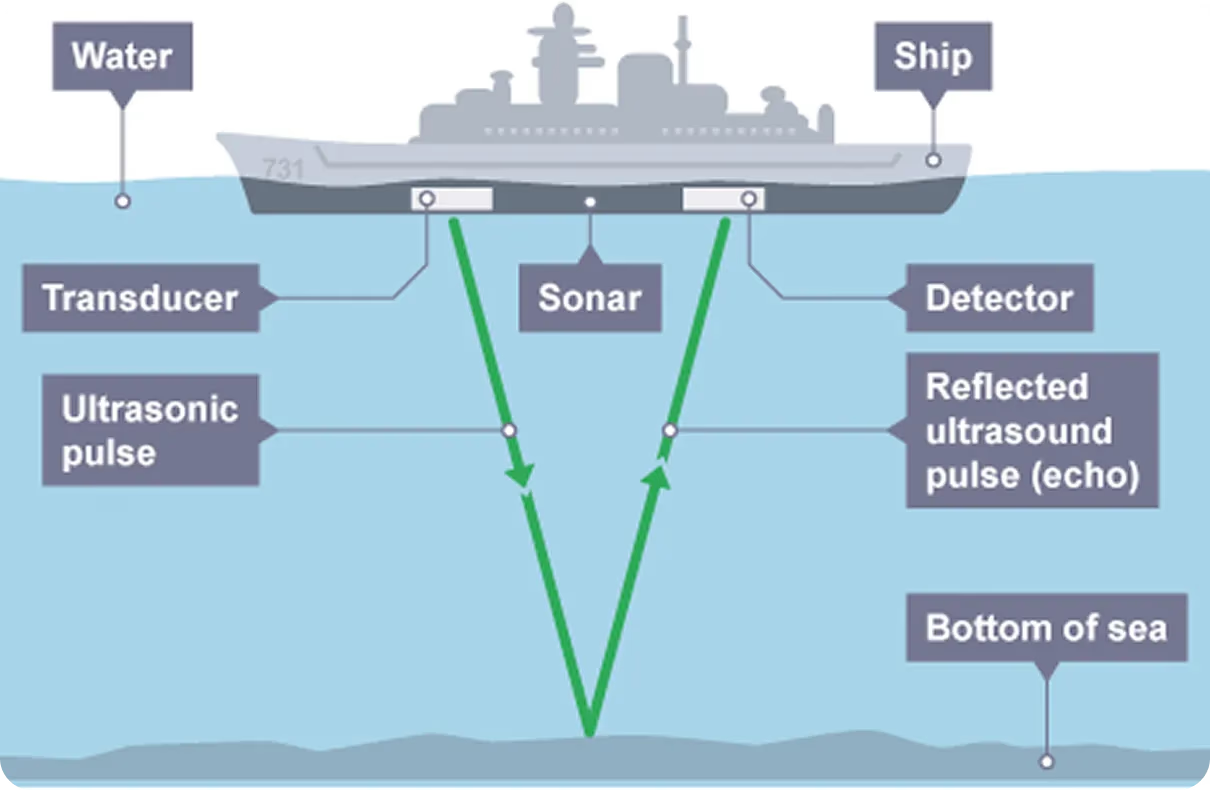
Fig 5. Como um sistema de SONAR usa pulsos de ultrassom para medir a profundidade do mar.
Link to this sectionDados visuais sintéticos e simulados para treinamento de modelos de IA#
Até agora, os diferentes tipos de dados que discutimos foram aqueles que podem ser coletados do mundo real. No entanto, dados visuais sintéticos e simulados são ambos tipos de conteúdo artificial. Dados sintéticos são gerados do zero usando modelagem 3D ou IA generativa para produzir imagens ou vídeos com aparência realista.

Fig 6. Um olhar sobre imagens geradas sinteticamente.
Dados simulados são semelhantes, mas envolvem a criação de ambientes virtuais que replicam como o mundo físico se comporta, incluindo reflexo de luz, formação de sombra e movimento de objetos. Embora todos os dados visuais simulados sejam sintéticos, nem todos os dados sintéticos são simulados. A principal diferença é que os dados simulados replicam comportamento realista, não apenas a aparência.
Esses tipos de dados são úteis para treinar modelos de visão computacional, particularmente quando dados do mundo real são difíceis de coletar ou quando situações específicas e raras precisam ser simuladas. Desenvolvedores podem criar cenas inteiras, escolher tipos de objetos, posições e iluminação, e adicionar automaticamente rótulos como caixas delimitadoras para treinamento. Isso ajuda a construir grandes e diversos datasets rapidamente, sem a necessidade de fotos reais ou rotulagem manual, que pode ser custosa e demorada.
Por exemplo, na saúde, dados sintéticos podem ser usados para treinar modelos para segmentar células de câncer de mama, onde coletar e rotular grandes datasets de imagens reais é difícil. Dados sintéticos e simulados fornecem flexibilidade e controle, preenchendo lacunas onde visuais do mundo real são limitados.
Link to this sectionEscolhendo o tipo certo de dados visuais para sua aplicação de IA#
Agora que vimos como funcionam diferentes tipos de dados visuais e o que podem fazer, vamos dar uma olhada mais de perto em quais tipos de dados são melhores para tarefas específicas:
- Imagens RGB: Perfeitas para tarefas gerais de visão computacional como classificação de imagem e detecção de objetos. Capturam cor e textura, mas são limitadas em condições desafiadoras como baixa luminosidade ou má visibilidade.
- Imagem LiDAR: Esse tipo de imagem oferece mapeamento 3D de alta precisão usando pulsos de laser. É excelente para aplicações que exigem medições de distância precisas, como robótica, veículos autônomos e inspeção de infraestrutura.
- Termografia: Como pode detectar diferenças de temperatura, é útil em condições de baixa visibilidade, como monitoramento noturno, combate a incêndios ou detecção de vazamentos de calor em máquinas e edifícios.
- Imagem multiespectral e hiperespectral: Útil para tarefas que exigem análise detalhada de materiais, como monitoramento agrícola, controle de qualidade farmacêutico ou sensoriamento remoto. Esses métodos fornecem percepções mais profundas ao capturar dados em uma ampla gama de comprimentos de onda além da luz visível.
- Imagem de radar e sonar: Preferidas em ambientes de baixa visibilidade. O radar usa ondas de rádio e é útil na aviação e navegação, enquanto o sonar usa ondas sonoras para operar na detecção subaquática.
- Dados visuais sintéticos e simulados: Ideais para treinar modelos de IA quando dados do mundo real são limitados, indisponíveis ou difíceis de rotular. Esses visuais artificiais ajudam a construir datasets diversos para cenários complexos como eventos raros ou condições críticas de segurança.
Às vezes, um único tipo de dado pode não fornecer precisão ou contexto suficiente em situações do mundo real. É aqui que a fusão de sensores multimodais se torna fundamental. Ao combinar RGB com outros tipos de dados como térmico, profundidade ou LiDAR, os sistemas podem superar limitações individuais, melhorando a confiabilidade e adaptabilidade.
Por exemplo, na automação de armazéns, usar RGB para reconhecimento de objetos, profundidade para medição de distância e térmico para detectar equipamentos superaquecendo torna as operações mais eficientes e seguras. Em última análise, os melhores resultados vêm da seleção ou combinação de tipos de dados com base nas necessidades específicas da sua aplicação.
Link to this sectionPrincipais pontos#
Ao construir modelos de visão com IA, escolher o tipo certo de dados visuais é crucial. Tarefas como detecção de objetos, segmentação e rastreamento de movimento dependem não apenas de algoritmos, mas também da qualidade dos dados de entrada. Datasets limpos, diversos e precisos ajudam a reduzir ruído e aprimorar o desempenho.
Ao combinar tipos de dados como RGB, profundidade, térmico e LiDAR, sistemas de IA obtêm uma visão mais completa do ambiente, tornando-os mais confiáveis em várias condições. À medida que a tecnologia continua a melhorar, ela provavelmente abrirá caminho para que a visão com IA se torne mais rápida, mais adaptável e mais impactante entre os setores.
Junte-se à nossa comunidade e explore nosso repositório GitHub para saber mais sobre visão computacional. Descubra várias aplicações relacionadas a IA na saúde e visão computacional no varejo em nossas páginas de soluções. Confira nossas opções de licenciamento para começar com visão computacional.






