Exploración de varios tipos de datos para aplicaciones de IA de visión
Descubre cómo los tipos de datos visuales, como la imagen térmica, LiDAR y las imágenes infrarrojas, permiten diversas aplicaciones de visión artificial en todos los sectores.

La tecnología como los drones solía ser limitada y solo accesible para investigadores y especialistas, pero hoy en día, el hardware de vanguardia es cada vez más accesible para un público más amplio. Este cambio está transformando la forma en que recopilamos datos visuales. Con una tecnología más accesible, ahora podemos capturar imágenes y vídeos de diversas fuentes, más allá de las cámaras tradicionales.
Paralelamente, el análisis de imágenes, impulsado por la visión artificial, una rama de la inteligencia artificial (IA), está evolucionando rápidamente, lo que permite a las máquinas interpretar y procesar datos visuales con mayor eficacia. Este avance ha abierto nuevas posibilidades para la automatización, la detección de objetos y el análisis en tiempo real. Ahora las máquinas pueden reconocer patrones, seguir movimientos y dar sentido a entradas visuales complejas.
Algunos tipos clave de datos visuales incluyen imágenes RGB (rojo, verde, azul), que se utilizan comúnmente para el reconocimiento de objetos; la termografía, que ayuda a detectar firmas térmicas en condiciones de baja luminosidad; y los datos de profundidad, que permiten a las máquinas entender entornos 3D. Cada uno de estos tipos de datos desempeña un papel vital en el impulso de diversas aplicaciones de IA de visión, desde la vigilancia hasta la imágenes médicas.
En este artículo, exploraremos los tipos clave de datos visuales utilizados en la IA de visión y cómo cada uno contribuye a mejorar la precisión, la eficiencia y el rendimiento en diversos sectores. ¡Empecemos!
Link to this sectionEl tipo más común de conjuntos de datos de imágenes y vídeos para IA#
Normalmente, cuando utilizas un smartphone para hacer una foto o ver imágenes de CCTV, estás trabajando con imágenes RGB. RGB significa rojo, verde y azul, y son los tres canales de color que representan la información visual en las imágenes digitales.
Las imágenes y los vídeos RGB son tipos de datos visuales estrechamente relacionados que se utilizan en la visión artificial, ambos capturados con cámaras estándar. La diferencia clave es que las imágenes capturan un momento único, mientras que los vídeos son una secuencia de fotogramas que muestran cómo cambian las cosas con el tiempo.
Las imágenes RGB se utilizan generalmente para tareas de visión artificial como la detección de objetos, la segmentación de instancias y la estimación de poses, respaldadas por modelos como Ultralytics YOLO11. Estas aplicaciones se basan en la identificación de patrones, formas o características específicas en un solo fotograma.
Los vídeos, por otro lado, son esenciales cuando el movimiento o el tiempo son factores importantes, como en el reconocimiento de gestos, la vigilancia o el seguimiento de acciones. Dado que los vídeos pueden considerarse una serie de imágenes, los modelos de visión artificial como YOLO11 los procesan fotograma a fotograma para comprender el movimiento y el comportamiento a lo largo del tiempo.
Por ejemplo, YOLO11 puede utilizarse para analizar imágenes o vídeos RGB con el fin de detectar malas hierbas y contar plantas en campos agrícolas. Esto mejora el seguimiento de los cultivos y ayuda a monitorizar los cambios a lo largo de los ciclos de crecimiento para una gestión agrícola más eficiente.

Fig 1. YOLO11 puede detectar y contar plantas para un seguimiento de cultivos más inteligente.
Link to this sectionDatos de profundidad en la IA de visión: LiDAR y percepción 3D#
Los datos de profundidad añaden una tercera dimensión a la información visual al indicar a qué distancia se encuentran los objetos de la cámara o el sensor. A diferencia de las imágenes RGB, que solo capturan el color y la textura, los datos de profundidad proporcionan un contexto espacial. Muestran la distancia entre los objetos y la cámara, lo que permite interpretar la disposición 3D de una escena.
Este tipo de datos se captura utilizando tecnologías como LiDAR, visión estéreo (utilizando dos cámaras para imitar la percepción de profundidad humana) y cámaras de tiempo de vuelo (que miden el tiempo que tarda la luz en viajar hasta un objeto y volver).
Entre ellos, el LiDAR (detección y medición por luz) suele ser el más fiable para la medición de la profundidad. Funciona enviando rápidos pulsos láser y midiendo cuánto tardan en rebotar. El resultado es un mapa 3D de alta precisión, conocido como nube de puntos, que destaca la forma, la posición y la distancia de los objetos en tiempo real.
Link to this sectionEl papel creciente del LiDAR en los sistemas de IA de visión#
La tecnología LiDAR puede dividirse en dos tipos principales, cada uno diseñado para aplicaciones y entornos específicos. Aquí tienes un análisis más detallado de ambos tipos:
- LiDAR aerotransportado: Utilizado normalmente para cartografiar grandes áreas, los escáneres LiDAR aerotransportados se montan en drones o aeronaves para capturar datos de alta resolución para la cartografía topográfica a gran escala. Es ideal para estudiar terrenos, bosques y paisajes.
- LiDAR terrestre: Este tipo de datos LiDAR se recopila a partir de sensores montados en vehículos o plataformas fijas para aplicaciones como la supervisión de infraestructuras, la construcción y la cartografía de interiores. Proporciona datos muy detallados de áreas más pequeñas y localizadas, lo que lo hace útil para tareas como la planificación urbana y la inspección de estructuras específicas.
Una aplicación impactante de los datos LiDAR se encuentra en los vehículos autónomos, donde desempeña un papel clave en tareas como la detección de carriles, la prevención de colisiones y la identificación de objetos cercanos. El LiDAR genera mapas 3D detallados y en tiempo real del entorno, lo que permite al vehículo ver objetos, calcular su distancia y navegar de forma segura.
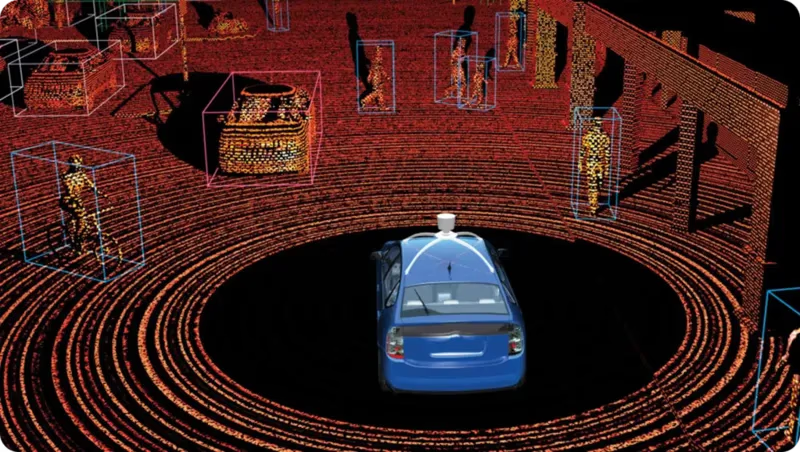
Fig 2. La tecnología LiDAR permite a los vehículos autónomos cartografiar la profundidad y detectar objetos.
Link to this sectionUso de datos térmicos e infrarrojos en aplicaciones de IA#
Las imágenes RGB capturan lo que vemos en el espectro de luz visible; sin embargo, otras tecnologías de imagen, como la térmica y la infrarroja, van más allá. La imagen infrarroja captura la luz infrarroja emitida o reflejada por los objetos, lo que la hace útil en condiciones de poca luz.
La termografía, por el contrario, detecta el calor emitido por los objetos y muestra las diferencias de temperatura, lo que le permite funcionar en total oscuridad o a través de humo, niebla y otras obstrucciones. Este tipo de datos es especialmente útil para la vigilancia y la detección de problemas, sobre todo en sectores donde los cambios de temperatura pueden indicar posibles fallos.
Un ejemplo interesante es el uso de la termografía para vigilar componentes eléctricos en busca de signos de sobrecalentamiento. Al detectar diferencias de temperatura, las cámaras térmicas pueden identificar problemas antes de que provoquen averías en los equipos, incendios o daños costosos.
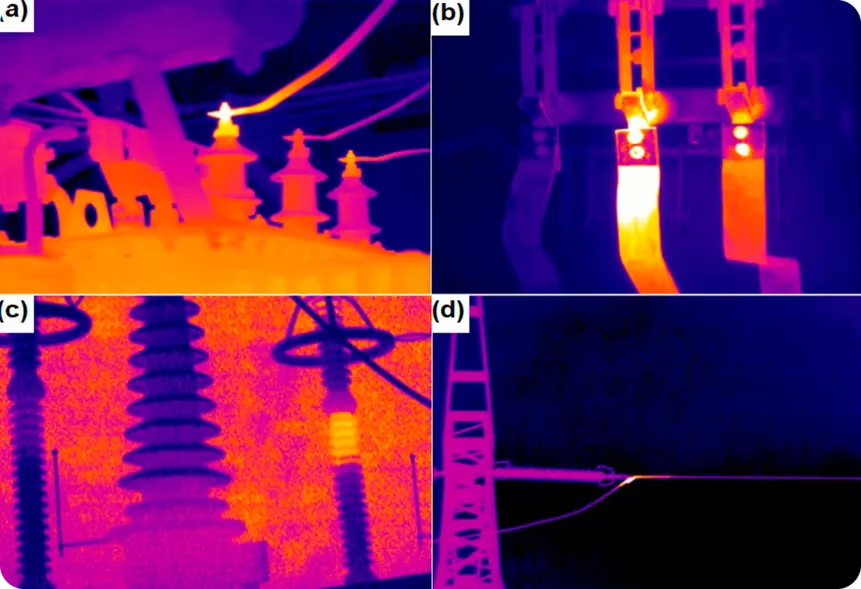
Fig 3. Un ejemplo de termografía utilizada para vigilar componentes eléctricos.
Del mismo modo, las imágenes infrarrojas pueden ayudar a detectar fugas en tuberías o aislamientos identificando las diferencias de temperatura que indican escapes de gases o fluidos, lo cual es crucial para prevenir situaciones peligrosas y mejorar la eficiencia energética.
Link to this sectionImágenes multiespectrales e hiperespectrales en IA#
Mientras que las imágenes infrarrojas y térmicas capturan aspectos específicos del espectro electromagnético, la imagen multiespectral recopila luz de unos pocos rangos de longitud de onda seleccionados, cada uno elegido para un propósito específico, como detectar vegetación sana o identificar materiales de superficie.
La imagen hiperespectral va un paso más allá al capturar luz a través de cientos de rangos de longitud de onda muy estrechos y continuos. Esto proporciona una firma lumínica detallada para cada píxel de la imagen, ofreciendo una comprensión mucho más profunda de cualquier material que se esté observando.
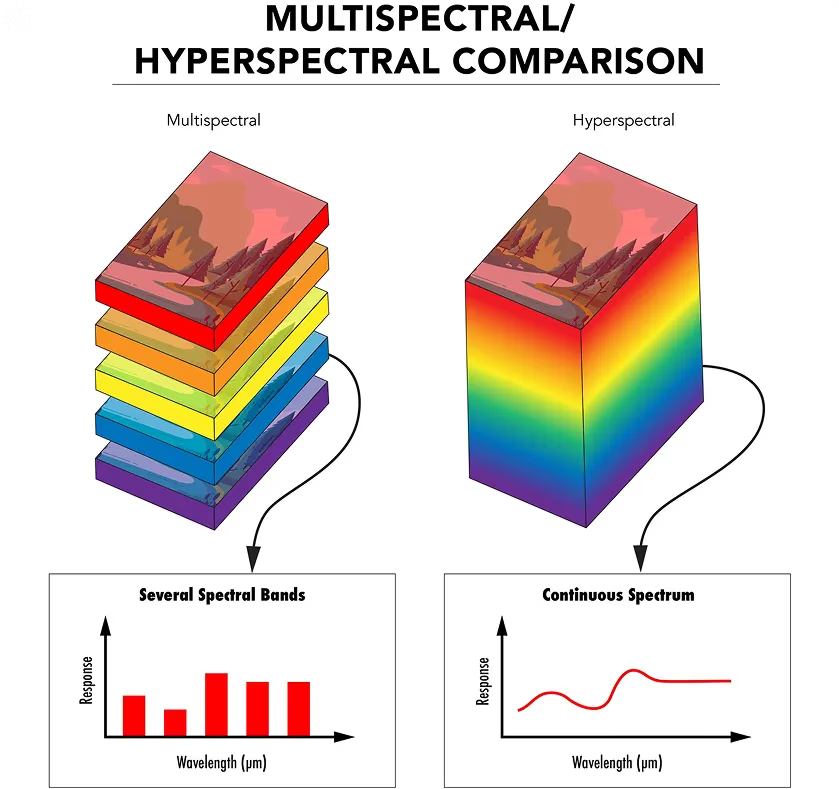
Fig 4. Comparación de imágenes multiespectrales e hiperespectrales.
Tanto las imágenes multiespectrales como las hiperespectrales utilizan sensores y filtros especiales para capturar luz a diferentes longitudes de onda. Los datos se organizan entonces en una estructura 3D llamada cubo espectral, donde cada capa representa una longitud de onda diferente.
Los modelos de IA pueden analizar estos datos para detectar características que las cámaras normales o el ojo humano no pueden ver. Por ejemplo, en el fenotipado de plantas, la imagen hiperespectral puede utilizarse para controlar la salud y el crecimiento de las plantas detectando cambios sutiles en sus hojas o tallos, como deficiencias de nutrientes o estrés. Esto ayuda a los investigadores a evaluar la salud de las plantas y a optimizar las prácticas agrícolas sin necesidad de métodos invasivos.
Link to this sectionAnálisis de imágenes de radar y sonar mediante IA#
Las imágenes de radar y sonar son tecnologías que detectan y cartografían objetos enviando señales y analizando sus reflejos, de forma similar al LiDAR. A diferencia de las imágenes RGB, que dependen de las ondas luminosas para capturar información visual, el radar utiliza ondas electromagnéticas, normalmente ondas de radio, mientras que el sonar utiliza ondas sonoras. Tanto los sistemas de radar como los de sonar emiten pulsos y miden el tiempo que tarda la señal en rebotar en un objeto, proporcionando información sobre su distancia, tamaño y velocidad.
Las imágenes de radar son especialmente útiles cuando la visibilidad es escasa, como en caso de niebla, lluvia o durante la noche. Como no dependen de la luz, pueden detectar aviones, vehículos o terrenos en total oscuridad. Esto hace que el radar sea una opción fiable en la aviación, la vigilancia meteorológica y la navegación autónoma.
En comparación, las imágenes por sonar se utilizan habitualmente en entornos submarinos donde la luz no puede llegar. Utilizan ondas sonoras que viajan a través del agua y rebotan en los objetos sumergidos, lo que permite la detección de submarinos, la cartografía de los fondos oceánicos y la ejecución de misiones de rescate submarino. Los avances en visión artificial permiten ahora seguir mejorando la detección submarina combinando datos de sonar con análisis inteligente para mejorar la detección y la toma de decisiones.
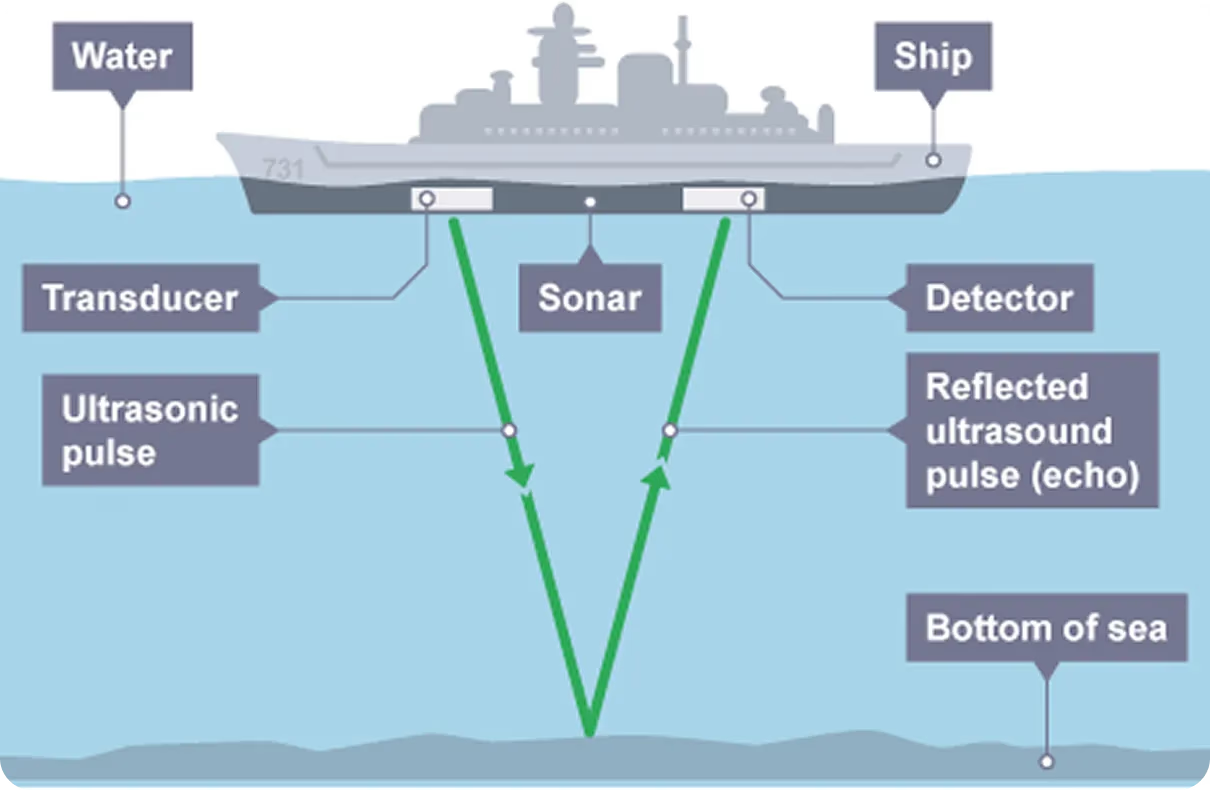
Fig 5. Cómo utiliza un sistema SONAR pulsos de ultrasonido para medir la profundidad del mar.
Link to this sectionDatos visuales sintéticos y simulados para el entrenamiento de modelos de IA#
Hasta ahora, los diferentes tipos de datos que hemos analizado han sido los que se pueden recopilar del mundo real. Sin embargo, los datos visuales sintéticos y simulados son ambos tipos de contenido artificial. Los datos sintéticos se generan desde cero mediante modelado 3D o IA generativa para producir imágenes o vídeos de aspecto realista.

Fig 6. Un vistazo a imágenes generadas sintéticamente.
Los datos simulados son similares, pero implican la creación de entornos virtuales que replican cómo se comporta el mundo físico, incluida la reflexión de la luz, la formación de sombras y el movimiento de los objetos. Aunque todos los datos visuales simulados son sintéticos, no todos los datos sintéticos son simulados. La diferencia clave es que los datos simulados replican un comportamiento realista, no solo el aspecto.
Estos tipos de datos son útiles para entrenar modelos de visión artificial, sobre todo cuando es difícil recopilar datos del mundo real o cuando hay que simular situaciones específicas y poco frecuentes. Los desarrolladores pueden crear escenas completas, elegir tipos de objetos, posiciones e iluminación, y añadir automáticamente etiquetas como cuadros delimitadores para el entrenamiento. Esto ayuda a crear grandes y diversos conjuntos de datos rápidamente, sin necesidad de fotos reales o etiquetado manual, lo que puede resultar costoso y llevar mucho tiempo.
Por ejemplo, en el ámbito sanitario, los datos sintéticos pueden utilizarse para entrenar modelos que segmenten células de cáncer de mama, donde recopilar y etiquetar grandes conjuntos de datos de imágenes reales resulta difícil. Los datos sintéticos y simulados ofrecen flexibilidad y control, cubriendo los vacíos donde los datos visuales del mundo real son limitados.
Link to this sectionCómo elegir el tipo de datos visuales adecuado para tu aplicación de IA#
Ahora que hemos visto cómo funcionan los distintos tipos de datos visuales y qué pueden hacer, analicemos más detenidamente qué tipos de datos son los mejores para tareas específicas:
- Imágenes RGB: Son perfectas para tareas generales de visión artificial como la clasificación de imágenes y la detección de objetos. Capturan el color y la textura, pero tienen limitaciones en condiciones difíciles como la poca luz o la mala visibilidad.
- Imágenes LiDAR: Este tipo de imagen ofrece una cartografía 3D de alta precisión mediante pulsos láser. Es ideal para aplicaciones que requieren mediciones precisas de la distancia, como la robótica, los vehículos autónomos y la inspección de infraestructuras.
- Termografía: Como puede detectar diferencias de temperatura, es útil en condiciones de baja visibilidad, como la vigilancia nocturna, la extinción de incendios o la detección de fugas de calor en maquinaria y edificios.
- Imágenes multiespectrales e hiperespectrales: Son útiles para tareas que requieren un análisis detallado de materiales, como la monitorización agrícola, el control de calidad farmacéutico o la teledetección. Estos métodos proporcionan una visión más profunda al capturar datos en un amplio rango de longitudes de onda más allá de la luz visible.
- Imágenes de radar y sonar: Se prefieren en entornos de baja visibilidad. El radar utiliza ondas de radio y resulta útil en aviación y navegación, mientras que el sonar utiliza ondas sonoras para operar en la detección submarina.
- Datos visuales sintéticos y simulados: Son ideales para el entrenamiento de modelos de IA cuando los datos del mundo real son limitados, no están disponibles o son difíciles de etiquetar. Estos elementos visuales artificiales ayudan a crear conjuntos de datos diversos para escenarios complejos, como eventos poco frecuentes o condiciones críticas para la seguridad.
A veces, un solo tipo de datos puede no proporcionar suficiente precisión o contexto en situaciones del mundo real. Aquí es donde la fusión de sensores multimodales se vuelve clave. Combinando RGB con otros tipos de datos como los térmicos, de profundidad o LiDAR, los sistemas pueden superar las limitaciones individuales, mejorando la fiabilidad y la adaptabilidad.
Por ejemplo, en la automatización de almacenes, el uso de RGB para el reconocimiento de objetos, profundidad para la medición de distancias y térmica para detectar equipos que se sobrecalientan hace que las operaciones sean más eficientes y seguras. En última instancia, los mejores resultados provienen de seleccionar o combinar tipos de datos en función de las necesidades específicas de tu aplicación.
Link to this sectionConclusiones clave#
Al crear modelos de IA de visión, elegir el tipo correcto de datos visuales es crucial. Tareas como la detección de objetos, la segmentación y el seguimiento del movimiento dependen no solo de los algoritmos, sino también de la calidad de los datos de entrada. Unos conjuntos de datos limpios, diversos y precisos ayudan a reducir el ruido y a mejorar el rendimiento.
Al combinar tipos de datos como RGB, profundidad, térmicos y LiDAR, los sistemas de IA obtienen una visión más completa del entorno, lo que los hace más fiables en diversas condiciones. A medida que la tecnología siga mejorando, probablemente allanará el camino para que la IA de visión sea más rápida, adaptable y eficaz en todos los sectores.
Únete a nuestra comunidad y explora nuestro repositorio de GitHub para aprender más sobre visión artificial. Descubre diversas aplicaciones relacionadas con la IA en la sanidad y la visión artificial en el comercio minorista en nuestras páginas de soluciones. Consulta nuestras opciones de licencia para empezar con la IA de visión.






