ビジョンAIアプリケーションのためのさまざまなデータタイプの探求
熱画像、LiDAR、赤外線画像などの視覚データタイプが、業界を横断して多様なコンピュータビジョンアプリケーションをどのように実現しているかをご覧ください。

ドローンのような技術は以前は制限があり、研究者や専門家しか利用できませんでしたが、今日では最先端のハードウェアがより多くの人々に利用可能になりつつあります。この変化は、ビジュアルデータの収集方法を変えています。技術が利用しやすくなったことで、従来のカメラだけでなく、さまざまなソースから画像や動画をキャプチャできるようになりました。
これと並行して、人工知能(AI)の一分野であるコンピュータビジョンによって実現される画像解析が急速に進化しており、マシンがビジュアルデータをより効果的に解釈・処理できるようになっています。この進歩により、自動化、物体検出、リアルタイム分析の新たな可能性が開かれました。マシンは現在、パターンを認識し、動きを追跡し、複雑なビジュアル入力を理解できるようになっています。
ビジュアルデータの主な型には、物体認識によく使用されるRGB(赤、緑、青)画像、低光量条件下での熱シグネチャの検出に役立つサーマルイメージング、マシンが3D環境を理解できるようにする深度データなどがあります。これらのデータ型はそれぞれ、監視から医療画像診断に至るまで、ビジョンAIのさまざまなアプリケーションを支える上で重要な役割を果たしています。
この記事では、ビジョンAIで使用される主要なビジュアルデータ型を解説し、それぞれがどのようにしてさまざまな業界全体での精度、効率、パフォーマンスの向上に貢献しているかを探ります。それでは始めましょう!
Link to this section最も一般的なAI用画像・動画データセット#
通常、スマートフォンで写真を撮ったり、CCTV映像を見たりする場合、RGB画像を扱っています。RGBは赤(Red)、緑(Green)、青(Blue)の略で、デジタル画像内のビジュアル情報を表現する3つのカラーチャンネルです。
RGB画像と動画は、どちらも標準的なカメラを使用してキャプチャされる、コンピュータビジョンで使用される密接に関連したビジュアルデータ型です。主な違いは、画像が単一の瞬間をキャプチャするのに対し、動画は物事が時間とともにどのように変化するかを示すフレームのシーケンスである点です。
RGB画像は、一般的に物体検出、インスタンスセグメンテーション、ポーズ推定といったコンピュータビジョンタスクに使用され、Ultralytics YOLO11のようなモデルによってサポートされています。これらのアプリケーションは、単一フレーム内のパターン、形状、または特定のフィーチャの識別に基づいています。
一方で動画は、ジェスチャー認識、監視、アクションの追跡など、動きや時間が要素となる場合に不可欠です。動画は一連の画像とみなすことができるため、YOLO11のようなコンピュータビジョンモデルは、時間経過に伴う動きや行動を理解するためにフレームごとに処理を行います。
例えば、YOLO11を使用してRGB画像や動画を分析し、農地の雑草を検出したり植物の数を数えたりすることができます。これにより作物の監視が強化され、効率的な農場管理のために成長サイクル全体を通じた変化を追跡できるようになります。

図1。YOLO11は、よりスマートな作物監視のために植物を検出・カウントできます。
Link to this sectionビジョンAIにおける深度データ:LiDARと3D認識#
深度データは、物体がカメラやセンサーからどれだけ離れているかを示すことにより、ビジュアル情報に3次元を加えます。色とテクスチャのみをキャプチャする RGB画像とは異なり、深度データは空間的なコンテキストを提供します。これにより物体とカメラ間の距離が示され、シーンの3Dレイアウトを解釈することが可能になります。
この種のデータは、LiDAR、ステレオビジョン(人間の深度認識を模倣するために2つのカメラを使用)、およびTime-of-Flight(光が物体に到達して戻ってくるまでの時間を測定)カメラのような技術を使用してキャプチャされます。
これらの中で、LiDAR(Light Detection and Ranging)は多くの場合、深度測定において最も信頼性が高いものです。これは、高速なレーザーパルスを送信し、反射して戻ってくるまでの時間を測定することで機能します。その結果、点群と呼ばれる非常に正確な3Dマップが得られ、リアルタイムで物体の形状、位置、距離が強調されます。
Link to this sectionビジョンAIシステムにおけるLiDARの役割の拡大#
LiDAR技術は2つの主要なタイプに分けられ、それぞれ特定のアプリケーションや環境向けに設計されています。両方のタイプを詳しく見ていきましょう。
- 空中LiDAR: 通常、広範囲のマッピングに使用され、空中LiDARスキャナーはドローンや航空機に搭載され、大規模な地形マッピングのための高解像度データをキャプチャします。地形、森林、景観の調査に最適です。
- 地上LiDAR: このタイプのLiDARデータは、インフラ監視、建設、屋内マッピングなどのアプリケーション向けに、車両や固定プラットフォームに搭載されたセンサーから収集されます。より小さく限定されたエリア向けに非常に詳細なデータを提供するため、都市計画や特定の構造物の調査などのタスクに役立ちます。
LiDARデータの強力なアプリケーションは自動運転車にあり、車線検出、衝突回避、周辺物体の識別といったタスクで重要な役割を果たします。LiDARは環境のリアルタイムな詳細3Dマップを生成し、車両が物体を視認し、距離を計算し、安全に走行できるようにします。
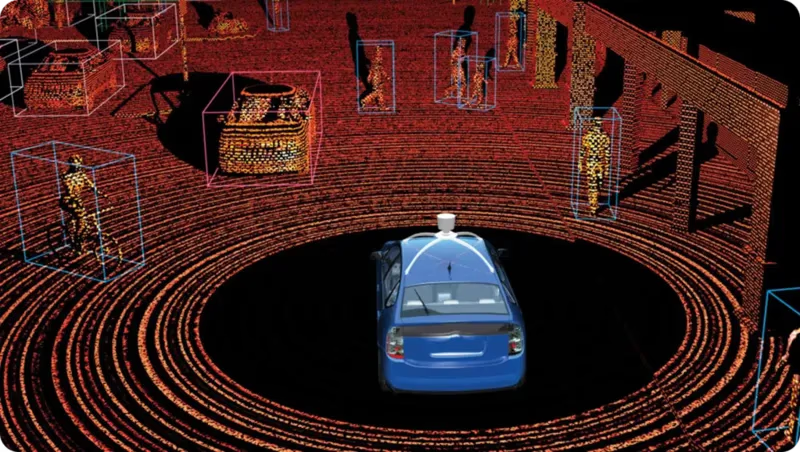
図2。LiDAR技術により、自動運転車は深度をマッピングし物体を検出できます。
Link to this sectionAIアプリケーションにおけるサーマルおよび赤外線データの利用#
RGB画像は可視光スペクトルで見えるものをキャプチャしますが、サーマルイメージングや赤外線イメージングなどの他の画像技術は、これを超えています。赤外線イメージングは物体から放射または反射される赤外線をキャプチャするため、低光量条件下で役立ちます。
対照的に、サーマルイメージングは物体から放射される熱を検出し、温度差を表示するため、完全な暗闇や、煙、霧、その他の障害物越しでも機能します。この種のデータは、特に温度変化が潜在的な問題の兆候となり得る業界において、監視や問題検出に特に役立ちます。
興味深い例として、過熱の兆候を監視するために電気部品にサーマルイメージングが使用されているケースがあります。温度差を検出することで、サーマルカメラは機器の故障、火災、または高額な損害につながる前に問題を特定できます。
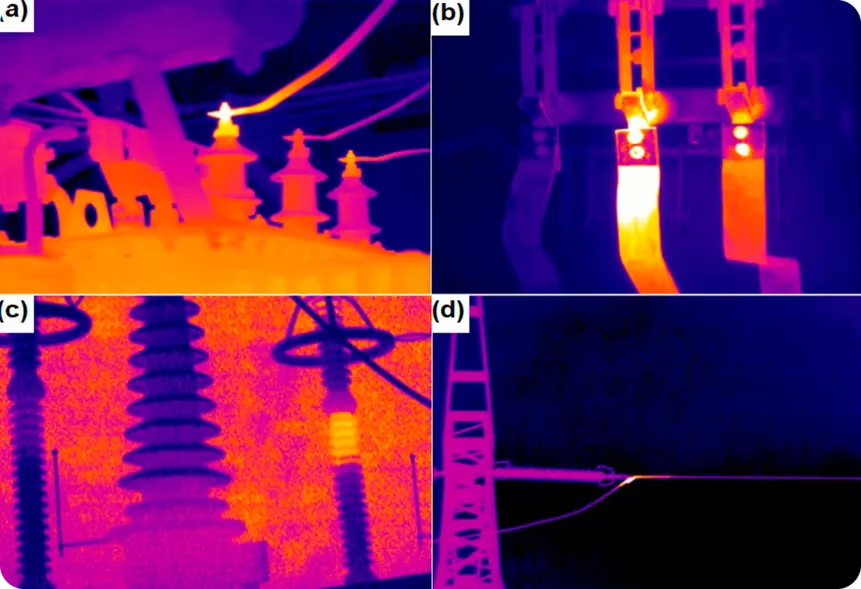
図3。電気部品の監視にサーマルイメージングが使用されている例。
同様に、赤外線画像は、漏出しているガスや液体を示す温度差を特定することで、パイプラインや断熱材の漏れを検出するのに役立ちます。これは危険な状況を防ぎ、エネルギー効率を向上させる上で極めて重要です。
Link to this sectionAIにおけるマルチスペクトルおよびハイパースペクトルイメージング#
赤外線やサーマルイメージングは電磁スペクトルの特定の側面をキャプチャしますが、マルチスペクトルイメージングは、健康な植生の検出や表面材料の識別など、特定の目的のために選択されたいくつかの波長範囲から光を収集します。
ハイパースペクトルイメージングは、これを一歩進めて、数百もの非常に狭く連続した波長範囲にわたって光をキャプチャします。これにより画像内の各ピクセルに対して詳細な光シグネチャが提供され、観察対象の材料についてより深い理解が得られます。
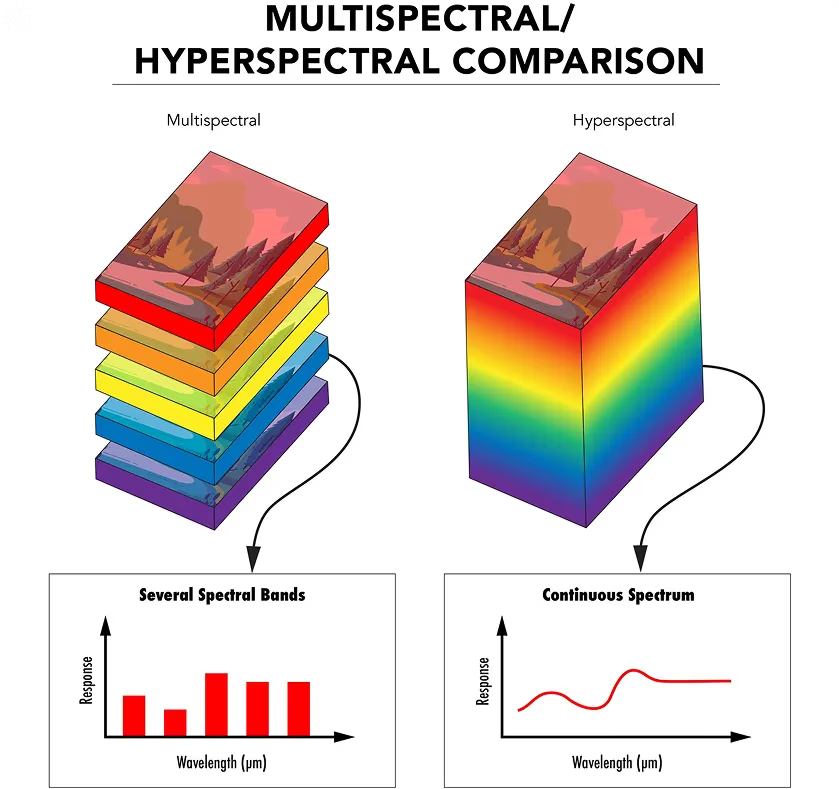
図4。マルチスペクトルおよびハイパースペクトルイメージングの比較。
マルチスペクトルおよびハイパースペクトルイメージングはどちらも、特殊なセンサーとフィルターを使用して異なる波長で光をキャプチャします。データはその後、スペクトルキューブと呼ばれる3D構造に整理され、各層が異なる波長を表します。
AIモデルはこのデータを分析して、通常のカメラや人間の目には見えない特徴を検出できます。例えば、植物フェノタイピングでは、ハイパースペクトルイメージングを使用して、葉や茎の栄養不足やストレスといった微妙な変化を検出することで、植物の健康状態や成長を監視できます。これにより、研究者は侵襲的な方法を必要とせずに植物の健康状態を評価し、農業実践を最適化することができます。
Link to this sectionAIを使用したレーダーおよびソナーイメージングの分析#
レーダーおよびソナーイメージングは、LiDARと同様に信号を送信し、その反射を分析することで物体を検出・マッピングする技術です。光波に依存してビジュアル情報をキャプチャするRGBイメージングとは異なり、レーダーは通常無線波などの電磁波を使用し、ソナーは音波を使用します。どちらのシステムもパルスを放射し、物体で信号が反射して戻ってくるまでの時間を測定することで、距離、サイズ、速度に関する情報を提供します。
レーダーイメージングは、霧、雨、夜間など、視界が悪い場合に特に役立ちます。光に依存しないため、完全な暗闇の中でも航空機、車両、地形を検出できます。これにより、レーダーは航空、気象監視、自律航行において信頼できる選択肢となっています。
比較として、ソナーイメージングは、光が届かない水中環境で一般的に使用されます。水の中を伝わり、水中の物体に反射する音波を使用することで、潜水艦の検出、海底のマッピング、水中救助任務の遂行が可能になります。コンピュータビジョンの進歩により、ソナーデータとインテリジェントな分析を組み合わせることで、水中検出がさらに強化され、検出と意思決定が向上しています。
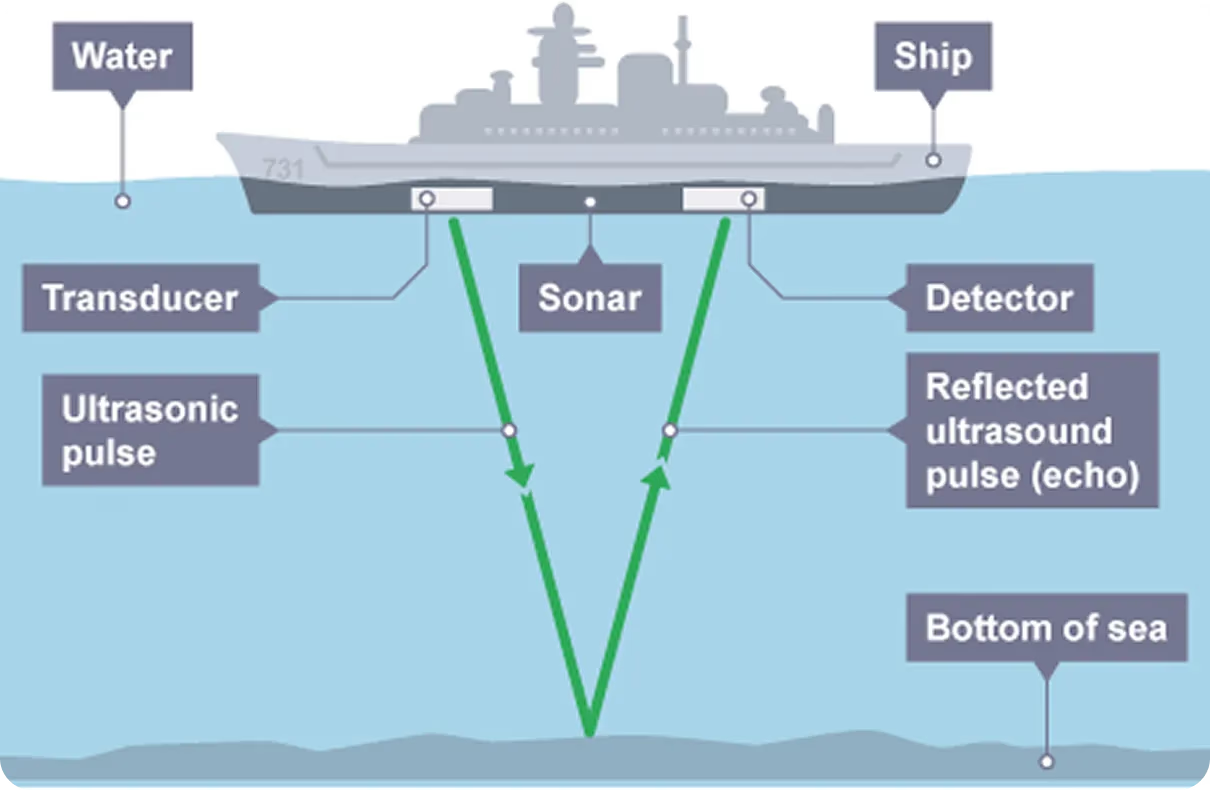
図5。 SONARシステムが超音波パルスを使用して水深を測定する仕組み。
Link to this sectionAIモデルトレーニング用の合成およびシミュレートされたビジュアルデータ#
これまでに説明したさまざまなデータ型は、現実世界から収集できるものでした。しかし、合成データとシミュレートされたビジュアルデータは、どちらも人工的なコンテンツの一種です。合成データは、3Dモデリングや生成AIを使用してゼロから作成され、リアルに見える画像や動画を生成します。

図6。合成生成された画像の例。
シミュレートされたデータも同様ですが、光の反射、影の形成、物体の動きなど、物理世界がどのように振る舞うかを再現する仮想環境を作成することが含まれます。すべてのシミュレートされたビジュアルデータは合成ですが、すべての合成データがシミュレートされているわけではありません。主な違いは、シミュレートされたデータは外観だけでなく、現実的な挙動を再現しているという点です。
これらのデータ型は、特に現実世界のデータの収集が困難な場合や、特定の珍しい状況をシミュレートする必要がある場合に、コンピュータビジョンモデルのトレーニングに役立ちます。開発者はシーン全体を作成し、物体のタイプ、位置、照明を選択し、トレーニング用のバウンディングボックスのようなラベルを自動的に追加できます。これにより、コストと時間がかかる可能性のある実際の写真撮影や手動ラベル付けを行わずに、多様な大規模データセットを迅速に構築できます。
例えば、医療分野では、合成データを使用して乳がん細胞をセグメンテーションするためのモデルをトレーニングできます。ここでは、実際の画像の大きなデータセットを収集しラベル付けすることが困難です。合成およびシミュレートされたデータは、現実世界のビジュアルが制限されている状況を補い、柔軟性と制御性を提供します。
Link to this sectionAIアプリケーションに適したビジュアルデータの選択#
さまざまなビジュアルデータ型がどのように機能し、何ができるかを見てきました。次に、どのデータ型が特定のタスクに最適かについて詳しく見ていきましょう。
- RGB画像: 画像分類や物体検出といった一般的なコンピュータビジョンのタスクに最適です。色とテクスチャをキャプチャしますが、低光量や視界不良といった過酷な条件下では制限があります。
- LiDARイメージング: この種のイメージングは、レーザーパルスを使用して高精度の3Dマッピングを提供します。ロボット工学、自動運転車、インフラ点検など、正確な距離測定を必要とするアプリケーションに最適です。
- サーマルイメージング: 温度差を検出できるため、夜間の監視、消防、機械や建物の熱漏れの検出など、視界が悪い状況で役立ちます。
- マルチスペクトルおよびハイパースペクトルイメージング: 農業監視、医薬品の品質管理、リモートセンシングなど、詳細な材料分析を必要とするタスクに役立ちます。これらの方法は、可視光を超えた幅広い波長にわたってデータをキャプチャすることで、より深い洞察を提供します。
- レーダーおよびソナーイメージング: 視界の悪い環境で推奨されます。レーダーは無線波を使用し、航空や航行に役立ちます。一方、ソナーは音波を使用して動作し、水中検出に適しています。
- 合成およびシミュレートされたビジュアルデータ: 現実世界のデータが制限されている、利用できない、またはラベル付けが困難な場合のAIモデルのトレーニングに最適です。これらの人工的なビジュアルは、珍しいイベントや安全性が重要な状況などの複雑なシナリオに向けた多様なデータセットを構築するのに役立ちます。
現実世界の状況では、単一のデータ型では十分な精度やコンテキストが得られない場合があります。ここで、マルチモーダルセンサーフュージョンが重要になります。RGBとサーマル、深度、LiDARなどの他のデータ型を組み合わせることで、システムは個々の制限を克服し、信頼性と適応性を向上させることができます。
例えば、倉庫の自動化において、物体認識にRGB、距離測定に深度、過熱機器の検出にサーマルを使用することで、業務はより効率的かつ安全になります。最終的に、最良の結果はアプリケーションの特定のニーズに基づいてデータ型を選択または組み合わせることで得られます。
Link to this section重要なポイント#
ビジョンAIモデルを構築する際、適切なタイプのビジュアルデータを選択することが不可欠です。物体検出、セグメンテーション、動き追跡といったタスクは、アルゴリズムだけでなく、入力データの品質にも依存します。クリーンで多様かつ正確なデータセットは、ノイズを減らしパフォーマンスを向上させるのに役立ちます。
RGB、深度、サーマル、LiDARなどのデータ型を組み合わせることで、AIシステムは環境のより完全な全体像を把握できるようになり、さまざまな条件下でより信頼性が高まります。技術が向上し続けるにつれて、ビジョンAIはより高速で適応性が高く、業界全体でより大きな影響を与えるものになるでしょう。
私たちのコミュニティに参加し、GitHubリポジトリを探索して、コンピュータビジョンについて詳しく学びましょう。AI in healthcareやcomputer vision in retailに関連するさまざまなアプリケーションをソリューションページで確認してください。ビジョンAIを始めるには、ライセンスオプションをご覧ください。






