製造におけるロボティクスの進化と未来
製造業におけるロボティクスは、機械学習と自動化を活用したAI駆動型システムへと進化しています。製造プロセスをどのように変革できるかを発見してください。

産業分野の仕事には、重い部品を持ち上げたり組み立てたりするなど、同じ物理的な作業を繰り返すものがよくあります。このような手作業は危険を伴う可能性があります。2023年には、米国だけでも5,283件の労働災害による死亡事故が報告されています。
しかし、スマート産業用ロボットや、人工知能(AI)やコンピュータビジョンといった技術の利用拡大に伴い、これらのリスクの高い作業の多くが現在では機械によって処理されるようになっています。製造現場のロボットは、重量物の運搬や設備の点検を行い、人間と協力して工場の安全性と効率性を向上させることができるようになっています。
この記事では、産業用ロボットがいかに工場の働き方を変え、より安全で生産性の高い職場環境の構築に貢献しているかを見ていきます。それでは始めましょう!
Link to this section産業用ロボットとは何か?#
産業用ロボットは、製造業務を支援するために特別に設計されたスマートマシンです。特に製造現場のロボットは通常、自動車や航空機の部品といった重量物の持ち上げを行うか、電子回路の組み立てや製品の梱包など、細かな作業を非常に高速で行うように構築されています。
ターミネーターやアイ, ロボットのようなSF映画によく登場する人型ロボットとは異なり、産業用ロボットは一般的に固定式で、単一のロボットアームを備えています。通常、このロボットアームは複数の方向に動かすことができ、溶接、組み立て、資材の移動など、製造におけるさまざまなジョブに対応できるようにプログラムされます。
産業用ロボットは、休憩を必要とせずに反復的な作業を迅速かつ正確に行うのが特に得意であり、工場や倉庫での使用に最適です。その結果、世界中の工場で400万台以上のロボットが使用されています。
Link to this section産業用ロボットの種類#
工場のロボットはますます一般的になっており、幅広いタスクをこなすようになっています。ここでは、いくつかの産業用ロボットの種類と、工場の作業をより効率的かつ安全にするためにそれらがどのように活用されているかを紹介します。
-
直交座標ロボット: ガントリーロボットとも呼ばれるこれらのロボットは、X、Y、Z軸に沿った3つのスライドジョイントを使用して直線状に動きます。そのシンプルな設計により高い精度が得られるため、製造および自動化タスクに最適です。
-
多関節ロボット: これらの関節式アームを持つロボットは、複数の回転関節を使用して人間の腕の動きを模倣します。柔軟性があり広い可動範囲を提供するため、組み立て、塗装、梱包に一般的に使用されます。
-
デルタロボット: 三角形のベースに3つの軽量アームが接続されたデルタロボットは、速度と敏捷性を重視して作られています。特に梱包業界における高速ピッキングおよび配置作業に適しています。
-
極座標ロボット: 最も初期の産業用ロボットの一種である極座標ロボットは、回転ジョイントと直線ジョイントを組み合わせて、球状の動作範囲を実現します。広い多方向へのリーチが必要な作業に役立ちます。
-
SCARAロボット: 「Selective Compliance Assembly Robot Arm(水平多関節ロボット)」の略であるSCARAロボットは、2つの回転関節と1つの直線関節を使用します。電子機器の組み立てや食品加工など、高速で正確な水平および垂直方向の動きを必要とする作業に最適です。
Link to this section製造におけるロボット工学の歴史#
産業用ロボットがいかに違いを生み出しているかについて具体的な例を見ていく前に、製造におけるロボットの進化を振り返り、長年にわたって産業用ロボット工学がどのように変化してきたかについて理解を深めましょう。
-
初期の製造(ロボット以前の時代): ロボットが登場する前、製造業は完全に手作業と基本的なツールに依存していました。産業革命により蒸気機関、機械、流れ作業が導入され生産性は向上しましたが、依然として多くの作業は反復的で危険、かつ労働集約的なままでした。
-
産業用ロボットの導入(1950年代〜1980年代): 1954年、ジョージ・デボルが初のプログラム可能なロボット「Unimate」を発明しました。1961年までに、ゼネラルモーターズはダイカストおよび溶接のためにこれを導入し、実用化された最初の産業用ロボットとなりました。これは大きな転換点となり、特に自動車製造において、危険で反復的な作業が自動化されました。
-
拡大と洗練(1990年代〜2000年代): ロボットはより高速で正確になり、かつ低コストになりました。その利用は電子機器、製薬、食品加工などの産業へと拡大しました。柔軟な自動化により、最小限の再プログラミングでロボットが複数のタスクを処理できるようになりました。
-
協働ロボットの台頭(2010年代〜現在): 協働ロボット、あるいはコボットが登場し、人間と安全に並んで働くようになりました。内蔵センサー、AI、およびカメラシステムにより、環境に適応し、複雑または繊細な作業を支援することができます。
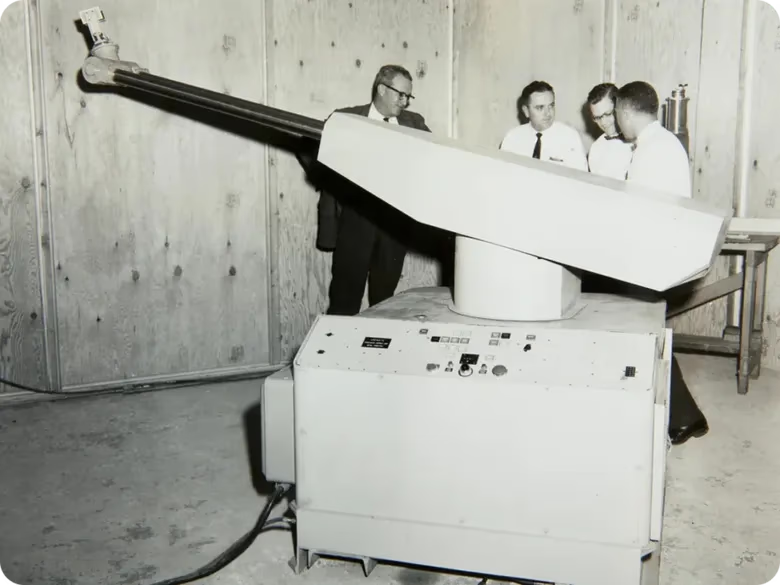
図1:ジョージ・デボルのUnimateロボット。(ソース)
今後の展望として、産業用ロボットはさらに賢く、適応性が高くなるでしょう。研究者やエンジニアは、ロボットが学習し、新しい状況に適応し、人々をサポートしながらダイナミックな方法でより緊密に協力できるようにする技術の開発に積極的に取り組んでいます。
Link to this section産業用ロボットの例#
次に、製造現場におけるロボットの現実的な例と、それらがどのように活用されているかを探ります。
Link to this section航空機製造における産業用ロボット#
航空機製造には、ボーイング777のような大型機の場合、特に複雑で繊細なプロセスが伴います。例えば、1機の777を組み立てるには60,000本以上のリベットが必要です。従来、この作業には2人の作業員が必要でした。1人がリベットガンを操作し、もう1人がパネルの裏側にスチール製のバーを当てて留め具を固定するというものです。
このような作業は身体的な負担が大きく、腕、背中、肩の怪我につながる可能性があります。さらに、航空機製造においては精度が極めて重要であり、許容される誤差はほとんどありません。
こうしたワークフローを強化するために、ボーイングは産業用ロボットを採用しました。ワシントン州エバレットの777工場で、同社はFuselage Automated Upright Build (FAUB)システムを導入しました。これは、胴体セクションの穴あけとリベット打ちを自動化するために設計されたロボット組立プロセスです。

図2:ボーイング機の胴体で作業するFAUBロボット。(ソース)
一度プログラムされると、これらのロボットはリベット用の何万もの完璧な穴をドリルで開けることができます。固定式の治具を使用した旧式のセットアップとは異なり、FAUBロボットは移動可能で、ガイド付き車両に乗って組立ライン沿いに移動できます。作業員が胴体パネルを配置すると、ロボットがドリルとリベット打ちを引き継ぎ、速度と精度の両方を向上させます。このアプローチは、ロボット業界の最近の発展に合致しており、製造におけるより賢く、より安全で、より効率的なソリューションを追求し続けています。
Link to this section産業用ロボットによって実現された食品製造#
製造現場のロボットは、食品業界でも広く採用されています。例えば、ドイツのネスレの工場では、ベビーフードの製造が完全に自動化された梱包ラインを通じて管理されています。ロボットは、充填・密封されたフードトレイを殺菌用クレートへ移動させ、その後、出荷用の梱包へと移動させるなどのタスクを処理します。これにより、作業全体がより速く、より安全で、より信頼性の高いものになっています。
また、ネスレはボストン・ダイナミクス社のSpotのようなモバイルロボットを使用して、施設全体のメンテナンス問題を監視しています。特定のエリアでしか問題を検知できない従来の固定式センサーとは異なり、Spotは工場内を自由に移動できます。このモバイルで柔軟な自動化というコンセプトは、ロボット業界における成長トレンドです。
Spotは階段を登り、狭い場所を移動し、起伏のある床にも対応できます。特殊なセンサーを備えており、モーターやコンプレッサーなどの工場の機械を熱、騒音、その他の警告サインがないかチェックするのに役立ちます。また、Spotは問題を早期に容易に発見できるため、深刻になる前に問題に対処するのに役立ちます。

図3:食品製造施設を点検する産業用ロボット、Spot。(ソース)
Link to this section産業用ロボットの助けを借りた自動車製造#
産業用ロボットは常に自動車製造の主要な部分を占めてきました。実際、米国内のすべての産業用ロボットの設置の33%が自動車業界で行われています。
この興味深い例として、2013年のBMWスパータンバーグ工場があります。この施設では、安全柵なしで人間とロボットがドア組立ラインで並んで作業を行っており、これはBMWの施設として初めて、定期的な生産ラインでこの種の直接的な人間とロボットの協働を採用した事例となりました。
BMW X3モデルのドア内部に吸音材と防湿材を取り付けるために4台のロボットが使用されました。作業員がまず粘着シートを配置して軽く位置を合わせると、ロボットが引き継ぎ、ローラーヘッドを使用して高い精度で作業を完了させます。
システムは完全に自動化されており、プロセス中に加えられる正確な圧力を測定できるため、品質の継続的な監視が可能です。もしロボットの作業が中断された場合でも、人間の作業員が簡単に介入して手作業で作業を完了させることができ、遅延なく生産を維持できます。

図4:自動車工場で作業員と並んで働くロボット。(ソース)
Link to this section製造におけるロボット工学の利点#
次に、製造でロボットを使用する主な利点について詳しく見ていきましょう。
-
精度と正確さ: 産業用ロボットは、高レベルの精度と速度を提供します。中にはミクロン単位の精度でタスクを実行できるものもあります。
-
信頼性: 故障なしで最大100,000時間の寿命を持ち、産業用ロボットは中断することなく長期間稼働できます。
-
職場の安全性の向上: ロボットは、閉鎖空間での作業や危険物の取り扱いといった危険な作業も担当し、怪我による労働損失日数を35%削減するのに役立ちます。
-
生産性の向上: 人間とは異なり、ロボットは休憩、休暇、休養を必要としません。24時間稼働できるため、生産性を大幅に向上させることができます。
-
コスト効率: これらのロボットの購入と設置には最初は費用がかかるかもしれませんが、長期的には大きなコスト削減につながります。人件費を削減し、潜在的なエラーを減らし、怪我に関連する費用を削減します。
-
スケーラビリティ: ロボットを一度セットアップすれば、メーカーは余分な人員を雇ったり大きな変更を加えたりすることなく、より簡単に生産を拡大できます。つまり、メーカーは高まる需要に迅速に対応し、変化する市場において柔軟性を保つことができます。
Link to this section製造におけるロボット工学の課題と限界#
産業用ロボットは多くの利点を提供しますが、特に専門知識とメンテナンスの面でいくつかの課題も伴います。工場のこれらのロボットには、それらをプログラム、操作、保守するための熟練した専門家が必要です。
今日の産業現場で使用されている多くのロボットがAIや機械学習を活用しているにもかかわらず、故障を防ぐには定期的な整備が必要です。製造チームにそのような知識がまだない場合、スタッフのトレーニングは費用と時間がかかる場合があります。
興味深いことに、これらの課題に対する解決策もビジョンAI、より具体的にはコンピュータビジョンの形で提供されています。これはAIの一分野で、視覚データの理解に焦点を当てています。例えば、Ultralytics YOLO11のようなコンピュータビジョンモデルをトレーニングして、産業用ロボットの検出や追跡を行うことができます。YOLO11を使用してこれらのロボットを追跡することで得られた知見は、早期の問題発見(予測メンテナンスと呼ばれます)に使用できます。これにより、専門家による監視の必要性が減り、予期せぬ故障が軽減されます。
さらに、コンピュータビジョンはリアルタイムのデジタルツインの作成もサポートできます。デジタルツインは、物理的な機械やロボットの仮想モデルであり、製造環境から収集された視覚データを使用して構築されます。
デジタルツインにより、メーカーは設備をリアルタイムで監視し、問題が中断を引き起こす前に特定し、実際の生産を中断することなくプロセスの改善をテストできます。この技術は、より一貫したパフォーマンスを促進し、意思決定を改善し、コストのかかるダウンタイムを削減します。
Link to this section人工知能と機械学習技術#
産業用ロボットを使用する際の課題について議論する中で、多くのロボットが現在AIや機械学習によって動かされていることを見てきました。しかし、これは実際にどのように機能し、ロボット工学におけるAIの役割とは何でしょうか?
従来の産業用ロボットは、固定された反復的なタスクに限定されていました。これらはあらかじめプログラムされた指示に従うため、生産ラインの変更に容易に適応できません。そのため、柔軟性、速度、正確さが不可欠な環境では効率が低下します。
AIがなければ、ロボットは製品の欠陥をリアルタイムで検出したり、材料や位置のわずかな変化に適応したりすることができず、多くの場合、プロセスの遅延、エラーの増加、ダウンタイムの増大につながります。製造におけるAIは、ロボットが単純なプログラム済みのタスクを超えて活用されることを可能にしています。
具体的には、製造における機械学習により、ロボットは環境からのデータを分析し、パターンを認識し、時間の経過とともにパフォーマンスを向上させることができます。例えば、ビジョン対応ロボットは、組立ライン上の異なる物体を識別し、見ているものに基づいて動きを調整し、さらにはリアルタイムで欠陥や異常を検出できます。舞台裏では、コンピュータビジョンがこのイノベーションの原動力となっています。
通常、ビジョン対応ロボットには、Ultralytics YOLO11のようなコンピュータビジョンモデルを実行するために必要なハードウェアインフラが備わっています。カメラやコンピュータビジョンと統合されると、ロボットは基盤となるモデルの機能を得ます。YOLO11の場合、これはロボットが物体検出、追跡、セグメンテーションといったコンピュータビジョンタスクを実行できることを意味します。
Link to this sectionモノのインターネット(IoT)の影響#
産業用ロボットに関連するもう一つの概念は、製造におけるIoTとエッジコンピューティングです。IoTは、データを収集して(主にインターネットを介して)共有する接続デバイスのネットワークを指します。一方、エッジコンピューティングは、中央サーバーにすべてを送信する必要なく、ロボットやセンサーなどのソースで直接データを処理します。
産業用IoT(IIoT)デバイスが大量のデータを収集する場合、分析のためにクラウド上の中央システムに送信すると、遅延(レイテンシ)が生じ、処理が遅くなる可能性があります。しかし、IoTとエッジコンピューティングを併用することで、メーカーはデータを即座に処理できるため、リアルタイムの応答が可能となり、自動化を促進できます。
製造においてAIとIoTが連携している明確な例が予測メンテナンスです。スマート工場において、インダストリー4.0の主な目標の1つは、機器の故障が起こる前に予測することです。
これを達成するには、IIoTデバイスが完全に機能し、信頼できる必要があります。エッジコンピューティング、AI、コンピュータビジョンを組み合わせることで、これらのデバイスは自身の状態を継続的に監視し、メンテナンスや充電が必要な時期を検出し、必要なアクションを自動的にトリガーできます。これにより、機械がスムーズに稼働し、計画外のダウンタイムが削減され、全体的な効率が向上します。
Link to this section自動化とロボット工学はいかに製造効率を向上させるか#
AI、コンピュータビジョン、IoT、エッジコンピューティングといった技術について理解が深まった今、これらを連携させて製造の自動化をより効率的にする方法を探ってみましょう。
自動化の主な目標は、プロセスを合理化し、より高速で、より信頼性が高く、人為的ミスが発生しにくいものにすることです。例えば、スマートフォンなどの家電製品を組み立てる工場を考えてみましょう。ビジョン対応ロボットアームは、小さな部品を回路基板上に正確に配置する繊細なタスクを処理できます。
同時に、AIを活用したビジョンシステムは組立の各ステップを検査し、配置ミスや半田付け不良などの欠陥をリアルタイムで特定できます。その間、IoTセンサーは温度、埃、振動といった環境要因を監視し、それらが繊細な部品の品質に影響を与える可能性がないか確認できます。
エッジコンピューティングを使用すると、システムはデータを即座に処理し、クラウドベースの応答を待たずに、ラインの一時停止やロボットの再校正といったその場での調整を行えます。これらを組み合わせることで、自動製造は、より高速で正確、かつ適応性の高い生産ラインを構築でき、製品品質の向上と運用コストの削減を実現します。
Link to this sectionロボット工学は製造の未来をどのように変革しているか?#
産業用ロボットの未来は、製造におけるビジョンAIやIoTといった技術が大きな役割を担い、急速に進歩しています。これらのツールにより、ロボットは作業対象を見て、欠陥を見つけ、製品品質を確認し、問題が発生した際に予測することができます。多くのメーカーが、業務をより効率的で一貫したものにするために、すでにこれらのシステムを使用しています。
産業用ロボット市場は着実に成長しており、この成長はロボット工学の絶え間ない改良、熟練したエンジニアへのアクセスのしやすさ、シミュレーションや仮想テストの利用によって支えられています。これらの開発により、実運用に向けたロボットの設計や微調整が迅速化されています。より多くの工場がデジタルツールと自動化を取り入れるにつれ、柔軟性や信頼性が高まり、将来の課題に対処する準備が整いつつあります。
当社のコミュニティやGitHubリポジトリに参加して、AIについてさらに詳しく探求してください。ソリューションページをチェックして、小売業におけるAIや農業におけるコンピュータビジョンについて読んでみてください。ライセンスオプションを確認し、今すぐコンピュータビジョンを使った構築を始めましょう!






