Die Vorteile von Ultralytics YOLO11 als ankerfreier Detektor
Verstehe, wie Ultralytics YOLO11 die ankerfreie Objekterkennung unterstützt und welche Vorteile diese Modellarchitektur für verschiedene Anwendungen mit sich bringt.

Wenn wir einen Blick auf die Geschichte der Vision AI-Modelle werfen, sehen wir, dass das Konzept der Objekterkennung – eine zentrale Aufgabe der Computer Vision, die das Identifizieren und Lokalisieren von Objekten innerhalb eines Bildes oder Videos umfasst – bereits seit den 1960er Jahren existiert. Der Hauptgrund für ihre heutige Bedeutung bei modernsten Innovationen liegt jedoch darin, dass sich Techniken zur Objekterkennung und Modellarchitekturen seitdem rasant weiterentwickelt und verbessert haben.
In einem früheren Artikel haben wir die Evolution der Objekterkennung und den Weg, der zu den Ultralytics YOLO-Modellen führte, besprochen. Heute konzentrieren wir uns auf einen spezifischeren Meilenstein auf dieser Reise: den Sprung von anchor-basierten zu anchor-freien Detektoren.
Anchor-basierte Detektoren stützen sich auf vordefinierte Boxen, sogenannte „Anchors“, um vorherzusagen, wo sich Objekte in einem Bild befinden. Im Gegensatz dazu überspringen anchor-freie Detektoren diese vordefinierten Boxen und sagen Objektpositionen stattdessen direkt vorher.
Obwohl dieser Wandel wie eine einfache, logische Änderung erscheinen mag, hat er tatsächlich zu wesentlichen Verbesserungen bei der Genauigkeit und Effizienz der Objekterkennung geführt. In diesem Artikel erfahren wir, wie anchor-freie Detektoren die Computer Vision durch Fortschritte wie Ultralytics YOLO11 neu gestaltet haben.
Link to this sectionWas sind anchor-basierte Detektoren?#
Anchor-basierte Detektoren verwenden vordefinierte Boxen, bekannt als Anchors, um Objekte in einem Bild zu lokalisieren. Stell dir diese Anchors wie ein Raster aus Boxen unterschiedlicher Größe und Form vor, die über das Bild gelegt werden. Das Modell passt diese Boxen dann an, um sie an die erkannten Objekte anzupassen. Wenn das Modell beispielsweise ein Auto identifiziert, modifiziert es die Anchor-Box, um Position und Größe des Autos präziser abzubilden.
Jeder Anchor ist mit einem möglichen Objekt im Bild verknüpft, und während des Trainings lernt das Modell, wie die Anchor-Boxen angepasst werden müssen, um Lage, Größe und Seitenverhältnis des Objekts besser zu treffen. Dies ermöglicht es dem Modell, Objekte in verschiedenen Skalierungen und Ausrichtungen zu erkennen. Die Auswahl des richtigen Sets an Anchor-Boxen kann jedoch zeitaufwendig sein, und der Prozess der Feinabstimmung ist fehleranfällig.
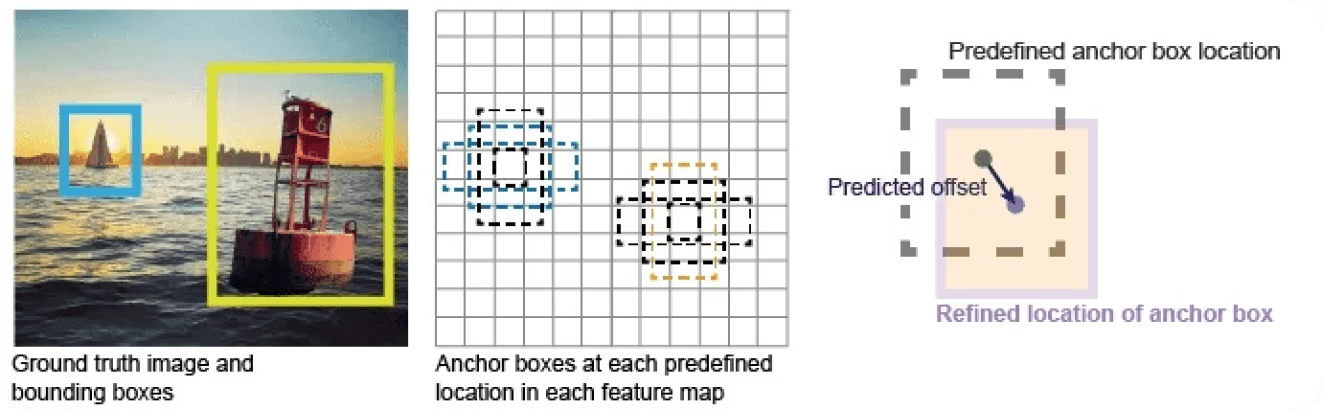
Abb. 1. Was ist eine Anchor-Box?
Obwohl anchor-basierte Detektoren, wie YOLOv4, in vielen Anwendungen gut funktioniert haben, haben sie einige Nachteile. Anchor-Boxen decken beispielsweise nicht immer Objekte unterschiedlicher Formen oder Größen optimal ab, was es für das Modell schwieriger macht, kleine oder unregelmäßig geformte Objekte zu erkennen. Der Prozess der Auswahl und Feinabstimmung der Anchor-Box-Größen kann zudem zeitaufwendig sein und erfordert viel manuellen Aufwand. Abgesehen davon haben anchor-basierte Modelle oft Schwierigkeiten bei der Erkennung von verdeckten oder überlappenden Objekten, da sich die vordefinierten Boxen nicht gut an diese komplexeren Szenarien anpassen lassen.
Link to this sectionDer Wandel zur anchor-freien Objekterkennung#
Anchor-freie Detektoren gewannen 2018 mit Modellen wie CornerNet und CenterNet an Aufmerksamkeit. Diese verfolgten einen neuen Ansatz bei der Objekterkennung, indem sie die Notwendigkeit vordefinierter Anchor-Boxen eliminierten. Im Gegensatz zu herkömmlichen Modellen, die auf Anchor-Boxen verschiedener Größen und Formen angewiesen sind, um die Position von Objekten vorherzusagen, sagen anchor-freie Modelle Objektstandorte direkt vorher. Sie konzentrieren sich auf Schlüsselpunkte oder Merkmale des Objekts, wie den Mittelpunkt, was den Erkennungsprozess vereinfacht und ihn schneller und genauer macht.
So funktionieren anchor-freie Modelle im Allgemeinen:
- Keypoint-Erkennung: Anstatt vordefinierte Boxen zu verwenden, identifizieren manche Modelle wichtige Punkte auf einem Objekt, wie etwa das Zentrum oder spezifische Ecken. Diese Keypoints helfen Modellen dabei, die Position und Größe des Objekts zu bestimmen.
- Zentrum-Vorhersage: Einige Modelle konzentrieren sich darauf, das Zentrum eines Objekts vorherzusagen. Sobald das Zentrum lokalisiert ist, kann das Modell von dort aus die Größe und Position des gesamten Objekts ableiten.
- Heatmap-Regression: Viele anchor-freie Modelle nutzen Heatmaps, wobei jedes Pixel einen möglichen Standort eines Objekts repräsentiert. Stärkere Heatmap-Werte deuten auf ein höheres Vertrauen hin, dass an diesem Punkt ein Objekt vorhanden ist.
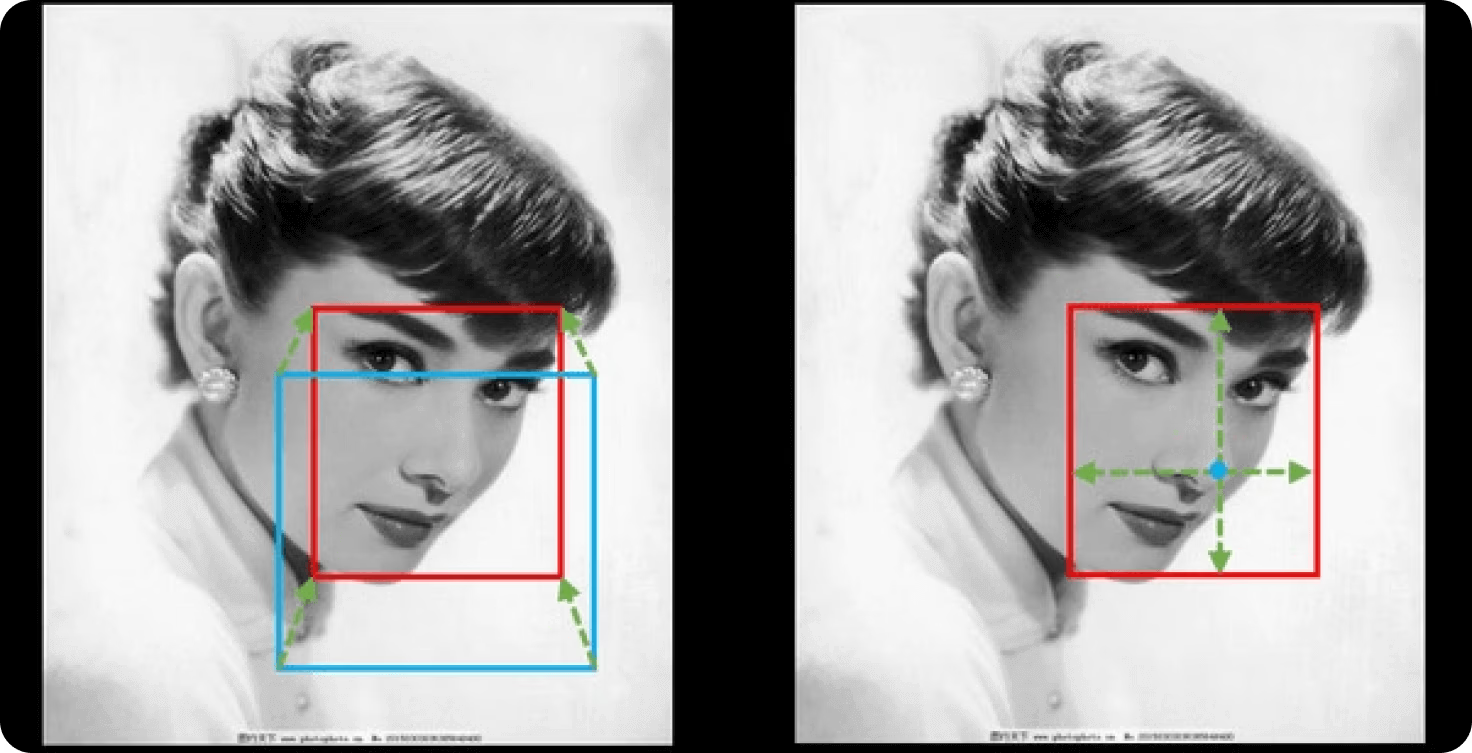
Abb. 2. Anchor-basierte Erkennung vs. anchor-freie Erkennung.
Da anchor-freie Modelle nicht auf Anchor-Boxen angewiesen sind, haben sie ein einfacheres Design. Das bedeutet, sie sind rechnerisch effizienter. Da sie nicht mehrere Anchor-Boxen verarbeiten müssen, können sie Objekte schneller erkennen – ein wichtiger Vorteil bei Echtzeitanwendungen wie autonomem Fahren und Videoüberwachung.
Anchor-freie Modelle sind zudem deutlich besser darin, kleine, unregelmäßige oder verdeckte Objekte zu handhaben. Da sie sich auf die Erkennung von Schlüsselpunkten konzentrieren, anstatt zu versuchen, Anchor-Boxen anzupassen, sind sie viel flexibler. Dies ermöglicht es ihnen, Objekte präzise in unübersichtlichen oder komplexen Umgebungen zu erkennen, wo anchor-basierte Modelle möglicherweise versagen.
Link to this sectionUltralytics YOLO11: Ein anchor-freier Detektor#
Ursprünglich für Geschwindigkeit und Effizienz konzipiert, haben sich YOLO-Modelle allmählich von anchor-basierten Methoden hin zur anchor-freien Erkennung verlagert, was Modelle wie YOLO11 schneller, flexibler und besser geeignet für eine breite Palette von Echtzeitanwendungen macht.
Hier ist ein kurzer Überblick darüber, wie sich das anchor-freie Design über verschiedene YOLO-Versionen hinweg entwickelt hat:
- Ultralytics YOLOv5u: Führte den „Anchor-Free Split Ultralytics Head“ ein, wodurch vordefinierte Anchor-Boxen nicht mehr nötig waren. Stattdessen sagt das Modell direkt vorher, wo sich Objekte im Bild befinden, was den Prozess vereinfacht und Flexibilität sowie Geschwindigkeit verbessert.
- YOLOv6: Eine neue Methode namens „Anchor-Aided Training“ (AAT) wurde eingesetzt, bei der Anchors nur während des Trainings verwendet wurden. Dies ermöglichte dem Modell, während des Trainings von der Struktur anchor-basierter Methoden zu profitieren, während zur Laufzeit für bessere Geschwindigkeit und Anpassungsfähigkeit die anchor-freie Erkennung genutzt wurde.
- Ultralytics YOLOv8: Vollständiger Umstieg auf anchor-freie Erkennung durch die Verwendung des „Anchor-Free Split Ultralytics Head“. Dies machte das Modell schneller und genauer, insbesondere bei kleinen oder unförmigen Objekten, die nicht gut in Anchor-Boxen passen.
- Ultralytics YOLO11: Baut auf dem anchor-freien Ansatz von YOLOv8 auf und optimiert die Erkennung weiter, indem Anchor-Boxen vollständig eliminiert werden. Dies führt zu einer schnelleren, genaueren Erkennung für Echtzeitanwendungen wie Tierverhaltensüberwachung und Einzelhandelsanalytik.
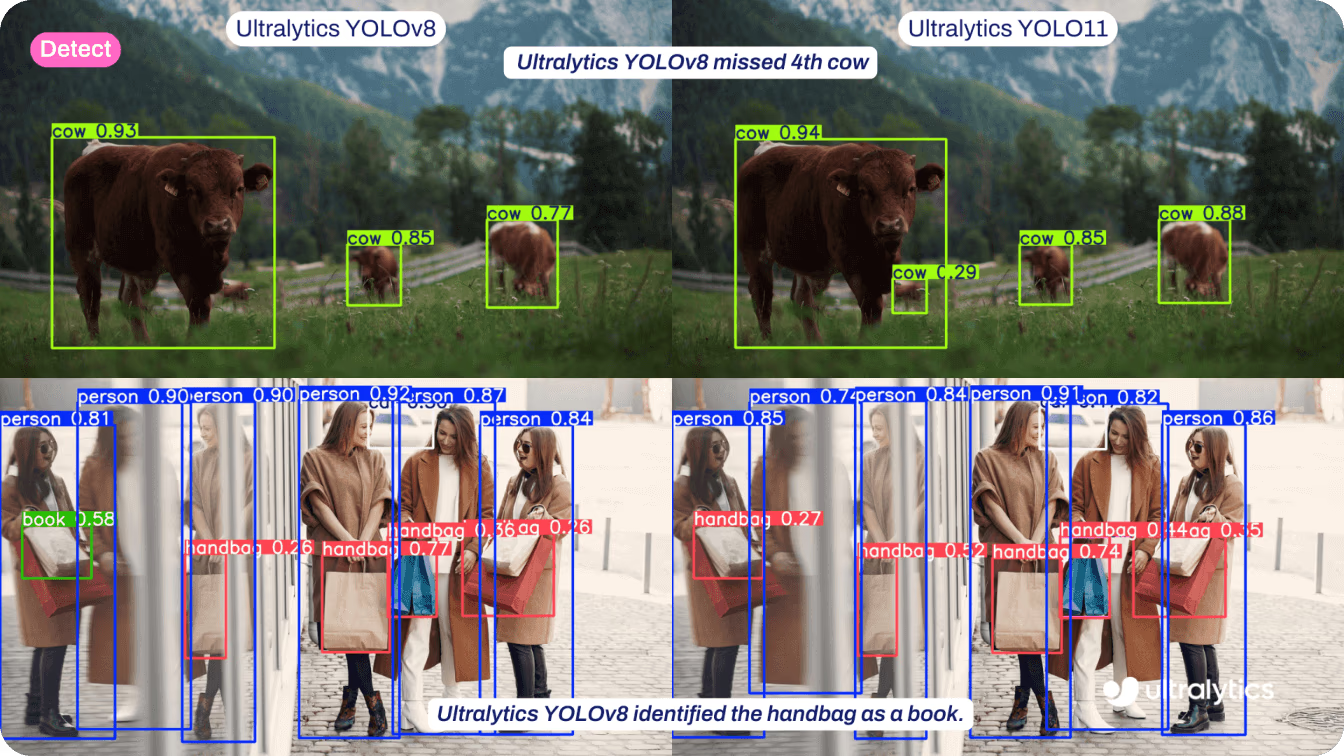
Abb. 3. Vergleich zwischen Ultralytics YOLOv8 und Ultralytics YOLO11.
Link to this sectionReale Anwendungen von YOLO11#
Ein großartiges Beispiel für die Vorteile der anchor-freien Erkennung mit YOLO11 findet sich bei autonomen Fahrzeugen. In selbstfahrenden Autos ist es für die Sicherheit entscheidend, Fußgänger, andere Fahrzeuge und Hindernisse schnell und präzise zu erkennen. Der anchor-freie Ansatz von YOLO11 vereinfacht den Erkennungsprozess, indem er direkt die Schlüsselpunkte von Objekten vorhersagt, wie die Mitte eines Fußgängers oder die Grenzen eines anderen Fahrzeugs, anstatt sich auf vordefinierte Anchor-Boxen zu verlassen.

Abb. 4. Vorteile der anchor-freien Erkennung in YOLO11 (Bild vom Autor).
YOLO11 muss kein Raster von Anchors an jedes Objekt anpassen oder einpassen, was rechenintensiv und langsam sein kann. Stattdessen konzentriert es sich auf Schlüsselmerkmale, was es schneller und effizienter macht. Wenn zum Beispiel ein Fußgänger den Weg des Fahrzeugs kreuzt, kann YOLO11 schnell dessen Position bestimmen, indem es Schlüsselpunkte lokalisiert – selbst wenn die Person teilweise verdeckt ist oder sich bewegt. Die Fähigkeit, sich ohne Anchor-Boxen an unterschiedliche Formen und Größen anzupassen, ermöglicht es YOLO11, Objekte zuverlässiger und bei höheren Geschwindigkeiten zu erkennen, was für die Entscheidungsfindung in Echtzeit bei Systemen für autonomes Fahren lebenswichtig ist.
Weitere Anwendungen, bei denen die anchor-freien Fähigkeiten von YOLO11 besonders hervorstechen, sind:
- Einzelhandel und Bestandsverwaltung: YOLO11 erleichtert die Überwachung von Produkten in Regalen, selbst wenn diese gestapelt oder teilweise verdeckt sind. Dies unterstützt eine schnellere, genauere Bestandsverfolgung und reduziert Fehler.
- Medizinische Bildgebung: YOLO11 ist auch im Gesundheitswesen effektiv, wo es Tumore oder andere Anomalien in medizinischen Scans erkennen kann. Die Fähigkeit, mit unregelmäßig geformten Objekten zu arbeiten, trägt zur Verbesserung der Genauigkeit bei der Diagnose komplexer Krankheitsbilder bei.
- Wildtierüberwachung: In der Wildtierforschung kann YOLO11 Tiere in dichten Wäldern oder schwierigem Gelände verfolgen und Forschern dabei helfen, das Verhalten zu beobachten oder vom Aussterben bedrohte Arten zu schützen.
- Sportanalytik: YOLO11 kann eingesetzt werden, um Spieler, Ballbewegungen oder andere Elemente bei Sportereignissen in Echtzeit zu verfolgen und Teams, Trainern und Sendern wertvolle Einblicke zu liefern.
Link to this sectionÜberlegungen bei der Arbeit mit anchor-freien Modellen#
Obwohl anchor-freie Modelle wie YOLO11 viele Vorteile bieten, bringen sie gewisse Einschränkungen mit sich. Eine der praktischen Hauptüberlegungen ist, dass auch anchor-freie Modelle Schwierigkeiten mit Verdeckungen oder stark überlappenden Objekten haben können. Die Begründung dafür ist, dass Computer Vision das menschliche Sehen replizieren möchte, und genau wie wir manchmal Schwierigkeiten haben, verdeckte Objekte zu identifizieren, können auch KI-Modelle vor ähnlichen Herausforderungen stehen.
Ein weiterer interessanter Faktor betrifft die Verarbeitung von Modellvorhersagen. Obwohl die Architektur anchor-freier Modelle einfacher ist als bei anchor-basierten, ist in bestimmten Fällen eine zusätzliche Verfeinerung erforderlich. Beispielsweise können Post-Processing-Techniken wie Non-Maximum Suppression (NMS) notwendig sein, um überlappende Vorhersagen zu bereinigen oder die Genauigkeit in überfüllten Szenen zu verbessern.
Link to this sectionDie Zukunft der KI mit YOLO11 verankern#
Der Wandel von anchor-basiert zu anchor-freier Erkennung war ein bedeutender Fortschritt in der Objekterkennung. Mit anchor-freien Modellen wie YOLO11 wird der Prozess vereinfacht, was zu Verbesserungen bei Genauigkeit und Geschwindigkeit führt.
Durch YOLO11 haben wir gesehen, wie die anchor-freie Objekterkennung bei Echtzeitanwendungen wie selbstfahrenden Autos, Videoüberwachung und medizinischer Bildgebung glänzt, wo schnelle und präzise Erkennung entscheidend ist. Dieser Ansatz ermöglicht es YOLO11, sich leichter an unterschiedliche Objektgrößen und komplexe Szenen anzupassen und bietet eine bessere Leistung in verschiedenen Umgebungen.
Während sich die Computer Vision weiterentwickelt, wird die Objekterkennung nur noch schneller, flexibler und effizienter werden.
Entdecke unser GitHub-Repository und tritt unserer aktiven Community bei, um bei allen Themen rund um KI auf dem Laufenden zu bleiben. Schau dir an, wie Vision AI Sektoren wie Fertigung und Landwirtschaft beeinflusst.






