Los beneficios de que Ultralytics YOLO11 sea un detector sin anclas
Comprende cómo Ultralytics YOLO11 soporta la detección de objetos sin anclas y los beneficios que esta arquitectura de modelo aporta a diversas aplicaciones.

Si echamos un vistazo a la historia de los modelos de IA de visión, el concepto de detección de objetos —una tarea fundamental de visión artificial que implica identificar y localizar objetos dentro de una imagen o vídeo— existe desde la década de 1960. Sin embargo, la razón clave de su importancia en las innovaciones de vanguardia actuales es que las técnicas de detección de objetos y las arquitecturas de modelos han avanzado y mejorado rápidamente desde entonces.
En un artículo anterior, hablamos de la evolución de la detección de objetos y el camino que ha llevado a los modelos Ultralytics YOLO. Hoy nos centraremos en explorar un hito más específico en este viaje: el salto de los detectores basados en anclas a los detectores libres de anclas.
Los detectores basados en anclas dependen de cuadros predefinidos, llamados "anclas", para predecir dónde están los objetos en una imagen. Por el contrario, los detectores libres de anclas omiten estos cuadros predefinidos y, en su lugar, predicen las ubicaciones de los objetos directamente.
Aunque este cambio pueda parecer un cambio lógico y sencillo, en realidad ha conducido a mejoras importantes en la precisión y eficiencia de la detección de objetos. En este artículo, entenderemos cómo los detectores libres de anclas han remodelado la visión artificial a través de avances como Ultralytics YOLO11.
Link to this section¿Qué son los detectores basados en anclas?#
Los detectores basados en anclas utilizan cuadros predefinidos, conocidos como anclas, para ayudar a localizar objetos en una imagen. Imagina estas anclas como una cuadrícula de cuadros de diferentes tamaños y formas colocados sobre la imagen. El modelo ajusta entonces estos cuadros para adaptarlos a los objetos que detecta. Por ejemplo, si el modelo identifica un coche, modificará el cuadro de ancla para que coincida con la posición y el tamaño del coche de forma más precisa.
Cada anchor está asociado a un posible objeto en la imagen y, durante el training, el modelo aprende a ajustar las anchor boxes para que coincidan mejor con la ubicación, el tamaño y la relación de aspecto del objeto. Esto permite que el modelo detecte objetos a diferentes escalas y orientaciones. Sin embargo, seleccionar el conjunto correcto de anchor boxes puede llevar mucho tiempo y el proceso de ajustarlas puede ser propenso a errores.
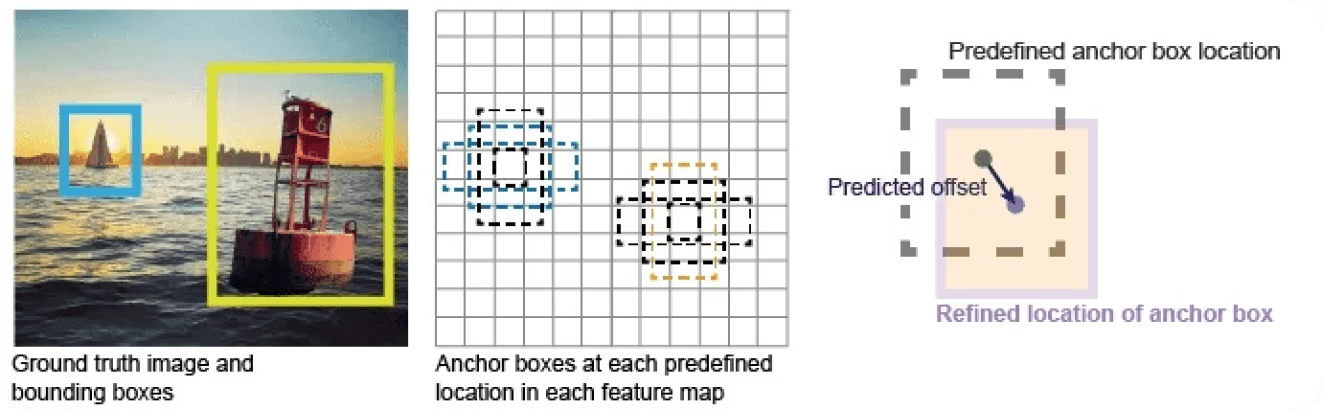
Fig 1. ¿Qué es un cuadro de ancla?
Aunque los detectores basados en anclas, como YOLOv4, han funcionado bien en muchas aplicaciones, tienen algunos inconvenientes. Por ejemplo, los cuadros de ancla no siempre se alinean bien con objetos de diferentes formas o tamaños, lo que hace más difícil para el modelo detectar objetos pequeños o de formas irregulares. El proceso de selección y ajuste fino de los tamaños de los cuadros de ancla también puede llevar mucho tiempo y requiere mucho esfuerzo manual. Además de esto, los modelos basados en anclas suelen tener dificultades para detectar objetos que están ocluidos o superpuestos, ya que los cuadros predefinidos pueden no adaptarse bien a estos escenarios más complejos.
Link to this sectionEl cambio a la detección de objetos libre de anclas#
Los detectores libres de anclas empezaron a ganar atención en 2018 con modelos como CornerNet y CenterNet, que adoptaron un nuevo enfoque para la detección de objetos al eliminar la necesidad de cuadros de ancla predefinidos. A diferencia de los modelos tradicionales que se basan en cuadros de ancla de diferentes tamaños y formas para predecir dónde están los objetos, los modelos libres de anclas predicen las ubicaciones de los objetos directamente. Se centran en puntos clave o características del objeto, como el centro, lo que simplifica el proceso de detección y lo hace más rápido y preciso.
Así es como funcionan generalmente los modelos libres de anclas:
- Detección de puntos clave: En lugar de utilizar cuadros predefinidos, algunos modelos identifican puntos importantes en un objeto, como el centro o esquinas específicas. Estos puntos clave ayudan a los modelos a determinar dónde está el objeto y qué tamaño tiene.
- Predicción del centro predicción: Algunos modelos se centran en predecir el centro de un objeto. Una vez localizado el centro, el modelo puede predecir el tamaño y la posición de todo el objeto a partir de ahí.
- Regresión de mapas de calor: Muchos modelos libres de anclas utilizan mapas de calor, donde cada píxel representa una posible ubicación de un objeto. Valores de mapa de calor más fuertes indican una mayor confianza de que un objeto está presente en ese punto.
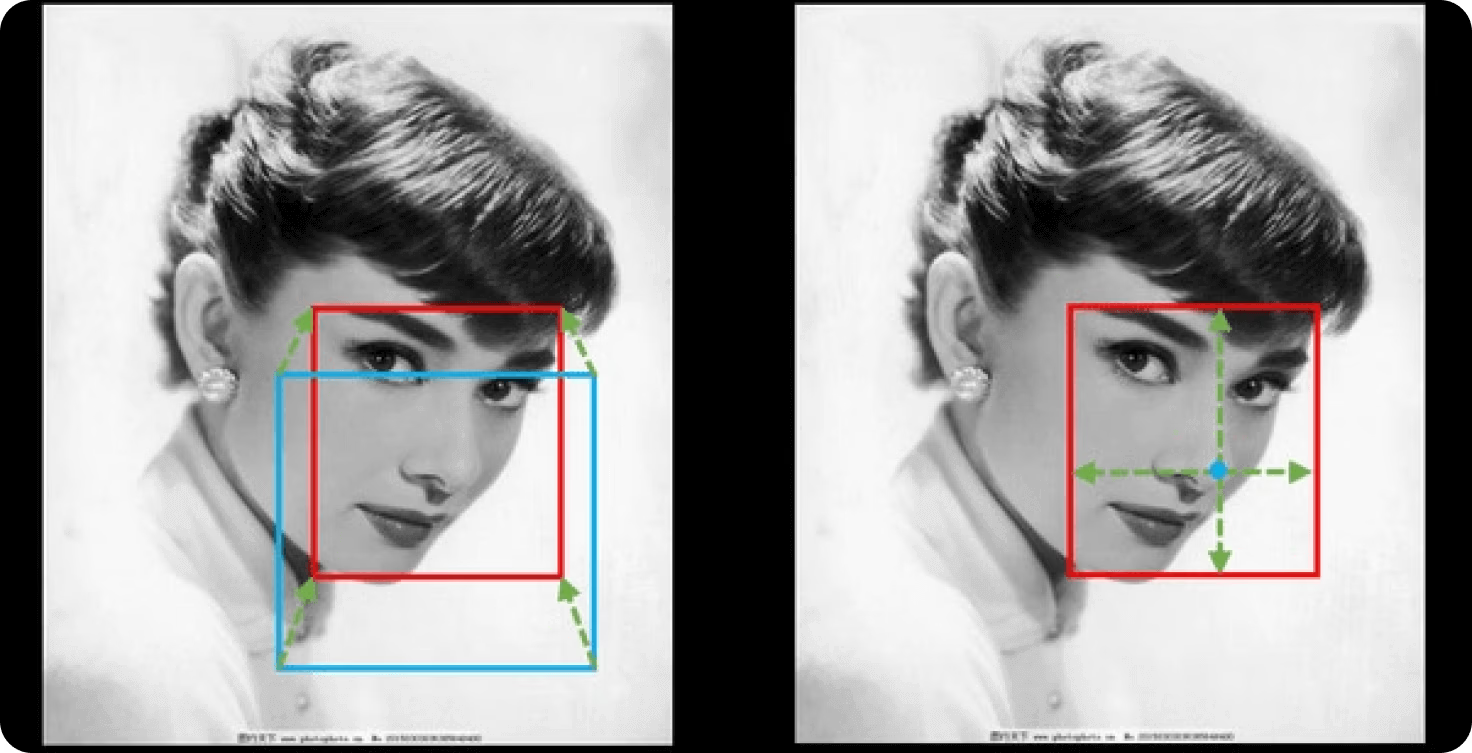
Fig 2. Detección basada en anclas frente a detección libre de anclas.
Debido a que los modelos libres de anclas no dependen de cuadros de ancla, tienen un diseño más sencillo. Esto significa que son computacionalmente más eficientes. Como no tienen que procesar múltiples cuadros de ancla, pueden detectar objetos más rápidamente, una ventaja importante en aplicaciones en tiempo real como la conducción autónoma y la videovigilancia.
Los modelos anchor-free también son mucho mejores manejando objetos pequeños, irregulares u ocluidos. Dado que se centran en detectar puntos clave en lugar de intentar ajustar anchor boxes, son mucho más flexibles. Esto les permite detectar objetos con precisión en entornos complejos o abarrotados donde los modelos basados en anchors pueden fallar.
Link to this sectionUltralytics YOLO11: Un detector libre de anclas#
Diseñados originalmente para la velocidad y la eficiencia, los modelos YOLO han pasado gradualmente de métodos basados en anclas a la detección libre de anclas, haciendo que modelos como YOLO11 sean más rápidos, más flexibles y mejor adaptados a una amplia gama de aplicaciones en tiempo real.
Aquí tienes un rápido vistazo a cómo ha evolucionado el diseño libre de anclas a través de las diferentes versiones de YOLO:
- Ultralytics YOLOv5u: Introdujo el cabezal Ultralytics Split libre de anclas, eliminando la necesidad de cuadros de ancla predefinidos. En su lugar, el modelo predice directamente dónde están los objetos en una imagen, simplificando el proceso y mejorando la flexibilidad y la velocidad.
- YOLOv6: Se utilizó un nuevo método llamado entrenamiento asistido por anclas (AAT, por sus siglas en inglés), donde las anclas se utilizaban solo durante el entrenamiento. Esto permitió al modelo beneficiarse de la estructura de los métodos basados en anclas durante el entrenamiento, mientras seguía utilizando la detección libre de anclas en tiempo de ejecución para mejorar la velocidad y la adaptabilidad.
- Ultralytics YOLOv8: Cambió totalmente a la detección libre de anclas mediante el uso del cabezal Ultralytics Split libre de anclas. Esto hizo que el modelo fuera más rápido y preciso, especialmente para objetos pequeños o con formas extrañas que no encajan bien con los cuadros de ancla.
- Ultralytics YOLO11: Se basa en el enfoque libre de anclas de YOLOv8, optimizando aún más la detección al eliminar por completo los cuadros de ancla. Esto resulta en una detección más rápida y precisa para aplicaciones en tiempo real como el monitoreo del comportamiento animal y el análisis minorista.
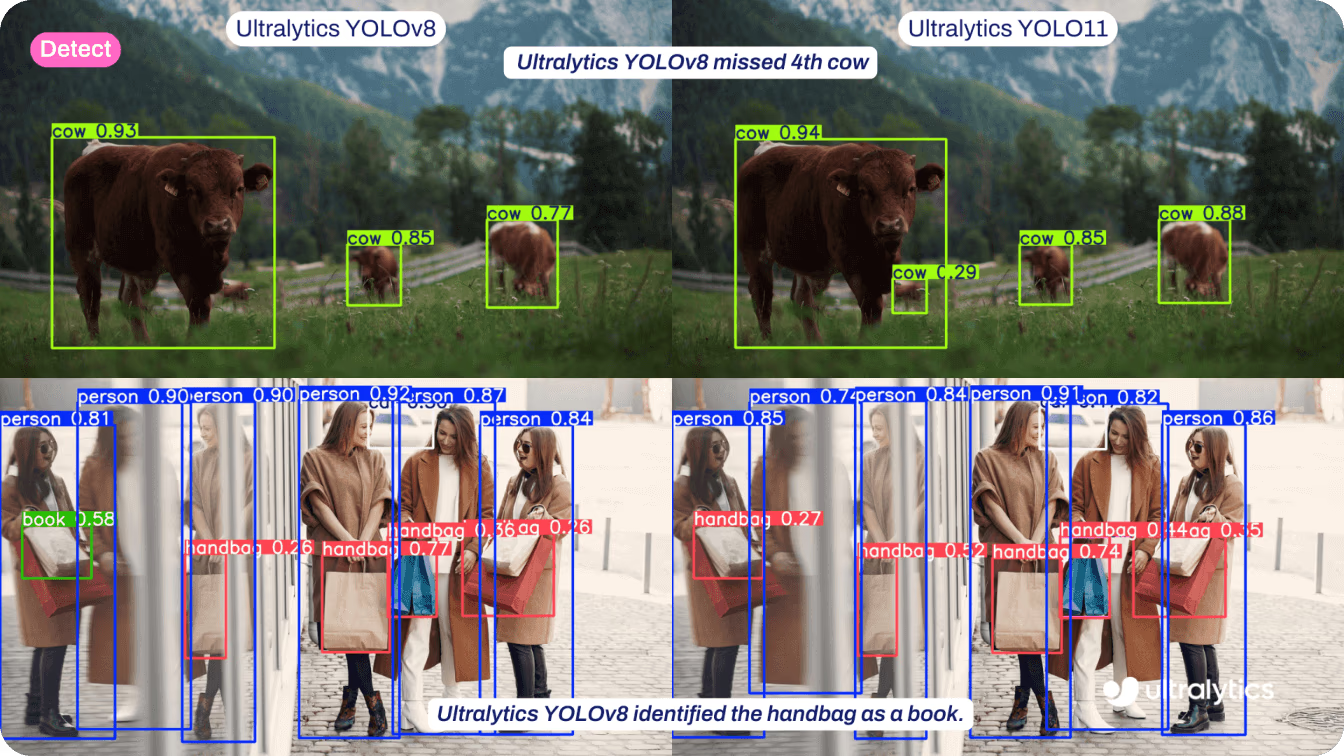
Fig 3. Comparación de Ultralytics YOLOv8 y Ultralytics YOLO11.
Link to this sectionAplicaciones del mundo real de YOLO11#
Un gran ejemplo de los beneficios de la detección libre de anclas utilizando YOLO11 es en los vehículos autónomos. En los coches de conducción autónoma, detectar peatones, otros vehículos y obstáculos de forma rápida y precisa es crucial para la seguridad. El enfoque libre de anclas de YOLO11 simplifica el proceso de detección al predecir directamente los puntos clave de los objetos, como el centro de un peatón o los límites de otro vehículo, en lugar de depender de cuadros de ancla predefinidos.

Fig 4. Beneficios de la detección libre de anclas en YOLO11 (Imagen del autor).
YOLO11 no necesita ajustar o encajar una cuadrícula de anclas en cada objeto, lo que puede ser costoso computacionalmente y lento. En su lugar, se centra en características clave, haciéndolo más rápido y eficiente. Por ejemplo, cuando un peatón se cruza en la trayectoria del vehículo, YOLO11 puede identificar rápidamente su ubicación señalando puntos clave, incluso si la persona está parcialmente oculta o en movimiento. La capacidad de adaptarse a diferentes formas y tamaños sin cuadros de ancla permite a YOLO11 detectar objetos de forma más fiable y a mayores velocidades, lo cual es vital para la toma de decisiones en tiempo real en sistemas de conducción autónoma.
Otras aplicaciones donde las capacidades libres de anclas de YOLO11 destacan realmente incluyen:
- Venta al por menor y gestión de inventario: YOLO11 facilita el monitoreo de los productos en las estanterías, incluso cuando están apilados o parcialmente bloqueados. Esto ayuda a un seguimiento del inventario más rápido y preciso, y reduce los errores.
- Imagenología médica: YOLO11 también es eficaz en el cuidado de la salud, donde puede detectar tumores u otras anomalías en exploraciones médicas. Su capacidad para trabajar con objetos de forma irregular ayuda a mejorar la precisión en el diagnóstico de enfermedades complejas.
- Monitoreo de vida silvestre: En la investigación de la vida silvestre, YOLO11 puede rastrear animales en bosques densos o terrenos difíciles, ayudando a los investigadores a monitorear el comportamiento o proteger especies en peligro de extinción.
- Análisis deportivo: YOLO11 se puede utilizar para rastrear jugadores, movimientos del balón u otros elementos en tiempo real durante eventos deportivos para proporcionar información valiosa a equipos, entrenadores y locutores.
Link to this sectionConsideraciones a tener en cuenta al trabajar con modelos libres de anclas#
Aunque los modelos libres de anclas como YOLO11 ofrecen muchas ventajas, tienen ciertas limitaciones. Una de las principales consideraciones prácticas a tener en cuenta es que incluso los modelos libres de anclas pueden tener dificultades con oclusiones u objetos muy superpuestos. La razón de esto es que la visión artificial pretende replicar la visión humana, y al igual que a nosotros a veces nos cuesta identificar objetos ocluidos, los modelos de IA pueden enfrentarse a retos similares.
Otro factor interesante está relacionado con el procesamiento de las predicciones del modelo. Aunque la arquitectura de los modelos libres de anclas es más sencilla que la de los basados en anclas, en ciertos casos es necesario un refinamiento adicional. Por ejemplo, pueden ser necesarias técnicas de postprocesamiento como la supresión no máxima (NMS, por sus siglas en inglés) para limpiar predicciones superpuestas o mejorar la precisión en escenas concurridas.
Link to this sectionAnclando el futuro de la IA con YOLO11#
El cambio de la detección basada en anclas a la libre de anclas ha sido un avance significativo en la detección de objetos. Con modelos libres de anclas como YOLO11, el proceso se simplifica, lo que lleva a mejoras tanto en precisión como en velocidad.
A través de YOLO11, hemos visto cómo la detección de objetos libre de anclas destaca en aplicaciones en tiempo real como coches de conducción autónoma, videovigilancia e imagenología médica, donde una detección rápida y precisa es crucial. Este enfoque permite a YOLO11 adaptarse más fácilmente a diferentes tamaños de objetos y escenas complejas, proporcionando un mejor rendimiento en diversos entornos.
A medida que la visión artificial sigue evolucionando, la detección de objetos solo será más rápida, más flexible y más eficiente.
Explora nuestro repositorio de GitHub y únete a nuestra dinámica comunidad para mantenerte al día de todo lo relacionado con la IA. Echa un vistazo a cómo la IA de visión está impactando en sectores como la fabricación y la agricultura.






