La evolución de la detección de objetos y los modelos YOLO de Ultralytics
Acompáñanos a echar la vista atrás a la evolución de la detección de objetos. Nos centraremos en cómo han avanzado los modelos YOLO (You Only Look Once) en los últimos años.
La visión artificial es una subdisciplina de la inteligencia artificial (IA) que se centra en enseñar a las máquinas a ver y entender imágenes y vídeos, de forma similar a como los humanos perciben el mundo real. Aunque reconocer objetos o identificar acciones es algo natural para los humanos, estas tareas requieren técnicas de visión artificial específicas y especializadas cuando se trata de máquinas. Por ejemplo, una tarea clave en visión artificial es la detección de objetos, que consiste en identificar y localizar objetos dentro de imágenes o vídeos.
Desde los años 60, los investigadores han trabajado en mejorar la forma en que los ordenadores pueden detectar objetos. Los primeros métodos, como la coincidencia de plantillas, consistían en deslizar una plantilla predefinida sobre una imagen para encontrar coincidencias. Aunque innovadores, estos enfoques tenían dificultades con los cambios en el tamaño, orientación y la iluminación de los objetos. Hoy en día, disponemos de modelos avanzados como Ultralytics YOLO11 que pueden detectar incluso objetos pequeños y parcialmente ocultos, conocidos como objetos ocluidos, con una precisión impresionante.
A medida que la visión artificial sigue evolucionando, es importante mirar atrás para ver cómo se han desarrollado estas tecnologías. En este artículo, exploraremos la evolución de la detección de objetos y arrojaremos luz sobre la transformación de los modelos YOLO (You Only Look Once). ¡Comencemos!
Link to this sectionLos orígenes de la visión artificial#
Antes de adentrarnos en la detección de objetos, echemos un vistazo a cómo empezó la visión artificial. Los orígenes de la visión artificial se remontan a finales de los años 50 y principios de los 60, cuando los científicos empezaron a investigar cómo el cerebro procesa la información visual. En experimentos con gatos, los investigadores David Hubel y Torsten Wiesel descubrieron que el cerebro reacciona a patrones simples como bordes y líneas. Esto formó la base de la idea detrás de la extracción de características: el concepto de que los sistemas visuales detectan y reconocen características básicas en las imágenes, como los bordes, antes de pasar a patrones más complejos.
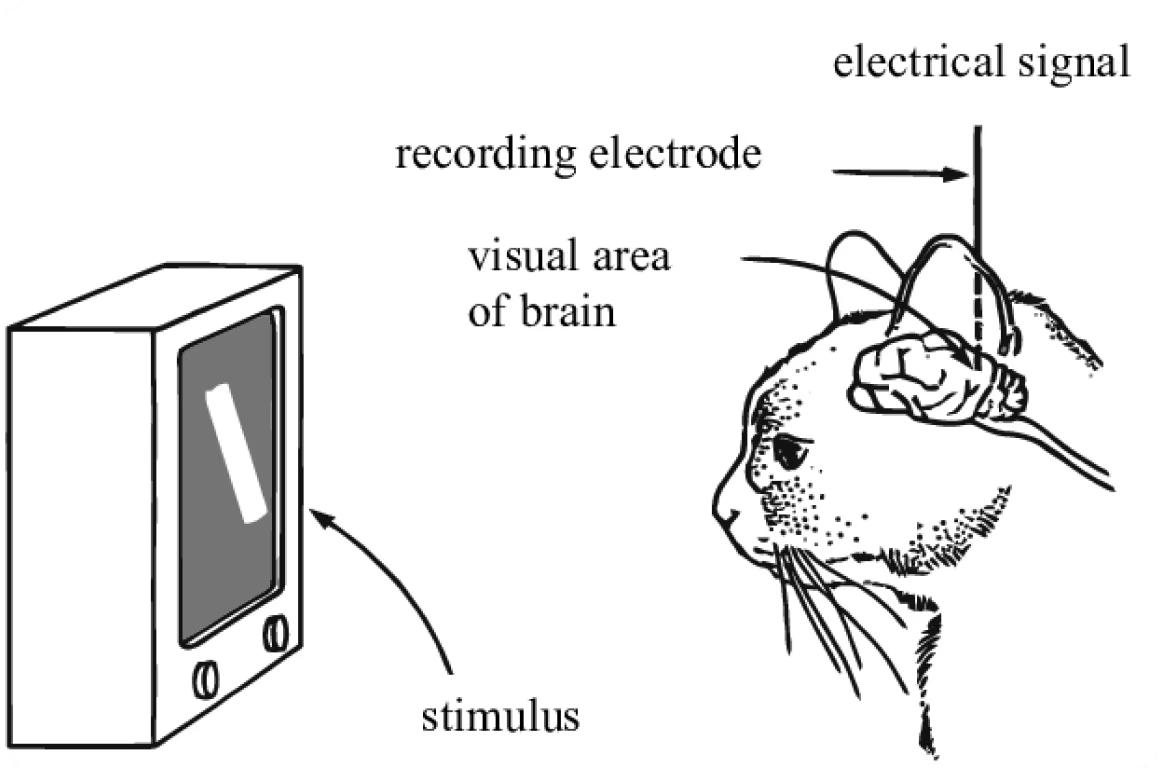
Fig 1. Aprender cómo reacciona el cerebro de un gato ante las barras de luz ayudó a desarrollar la extracción de características en visión artificial.
Al mismo tiempo, surgió una nueva tecnología capaz de convertir imágenes físicas a formatos digitales, lo que despertó el interés por cómo las máquinas podían procesar la información visual. En 1966, el Summer Vision Project del Instituto Tecnológico de Massachusetts (MIT) impulsó aún más las cosas. Aunque el proyecto no tuvo un éxito total, su objetivo era crear un sistema capaz de separar el primer plano del fondo en imágenes. Para muchos en la comunidad de visión por IA, este proyecto marca el inicio oficial de la visión artificial como campo científico.
Link to this sectionEntender la historia de la detección de objetos#
A medida que la visión artificial avanzaba a finales de los 90 y principios de los 2000, los métodos de detección de objetos pasaron de técnicas básicas como la coincidencia de plantillas a enfoques más avanzados. Un método popular fue Haar Cascade, que se utilizó ampliamente para tareas como la detección de rostros. Funcionaba escaneando imágenes con una ventana deslizante, comprobando características específicas como bordes o texturas en cada sección de la imagen, y luego combinando estas características para detectar objetos como rostros. Haar Cascade era mucho más rápido que los métodos anteriores.
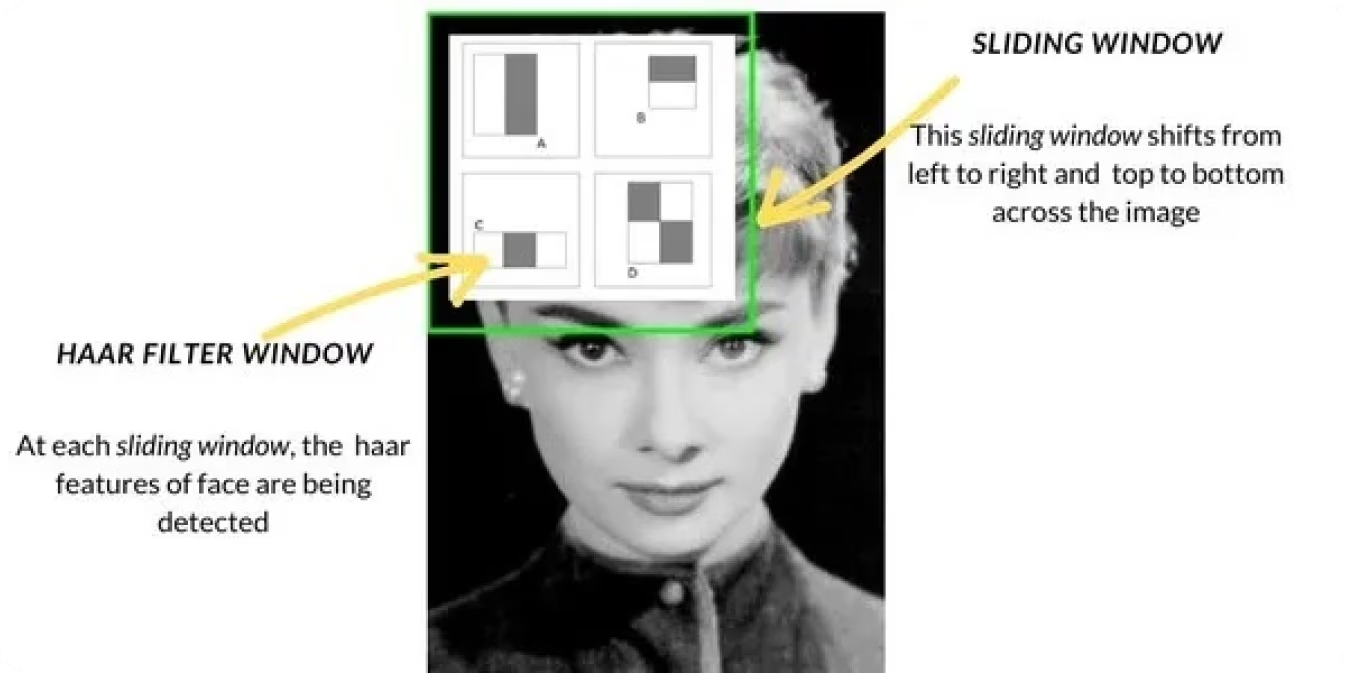
Fig 2. Uso de Haar Cascade para la detección de rostros.
Junto a estos, también se introdujeron métodos como el histograma de gradientes orientados (HOG) y las máquinas de vectores de soporte (SVM). HOG utilizaba la técnica de ventana deslizante para analizar cómo cambiaban la luz y las sombras en pequeñas secciones de una imagen, ayudando a identificar objetos en función de sus formas. Las SVM entonces clasificaban estas características para determinar la identidad del objeto. Estos métodos mejoraron la precisión, pero seguían teniendo dificultades en entornos del mundo real y eran más lentos en comparación con las técnicas actuales.
Link to this sectionLa necesidad de una detección de objetos en tiempo real#
En la década de 2010, el auge del aprendizaje profundo y las redes neuronales convolucionales (CNN) supuso un cambio importante en la detección de objetos. Las CNN hicieron posible que los ordenadores aprendieran automáticamente características importantes a partir de grandes cantidades de datos, lo que hizo que la detección fuera mucho más precisa.
Los primeros modelos como R-CNN (redes neuronales convolucionales basadas en regiones) supusieron una gran mejora en la precisión, ayudando a identificar objetos con mayor precisión que los métodos antiguos.
Sin embargo, estos modelos eran lentos porque procesaban las imágenes en múltiples etapas, lo que los hacía poco prácticos para aplicaciones en tiempo real en ámbitos como los coches autónomos o la videovigilancia.
Centrándose en acelerar el proceso, se desarrollaron modelos más eficientes. Modelos como Fast R-CNN y Faster R-CNN ayudaron perfeccionando la forma en que se elegían las regiones de interés y reduciendo el número de pasos necesarios para la detección. Aunque esto hizo que la detección de objetos fuera más rápida, seguía sin ser lo suficientemente rápida para muchas aplicaciones del mundo real que necesitaban resultados instantáneos. La creciente demanda de detección en tiempo real impulsó el desarrollo de soluciones aún más rápidas y eficientes que pudieran equilibrar tanto la velocidad como la precisión.

Fig 3. Comparación de las velocidades de R-CNN, Fast R-CNN y Faster R-CNN.
Link to this sectionModelos YOLO (You Only Look Once): Un hito importante#
YOLO es un modelo de detección de objetos que redefinió la visión artificial al permitir la detección en tiempo real de múltiples objetos en imágenes y vídeos, lo que lo hace bastante único respecto a los métodos de detección anteriores. En lugar de analizar cada objeto detectado individualmente, la arquitectura de YOLO trata la detección de objetos como una única tarea, prediciendo tanto la ubicación como la clase de los objetos de una sola vez mediante CNN.
El modelo funciona dividiendo una imagen en una cuadrícula, donde cada parte es responsable de detectar objetos en su área respectiva. Realiza múltiples predicciones para cada sección y filtra los resultados con menor confianza, manteniendo solo los más precisos.
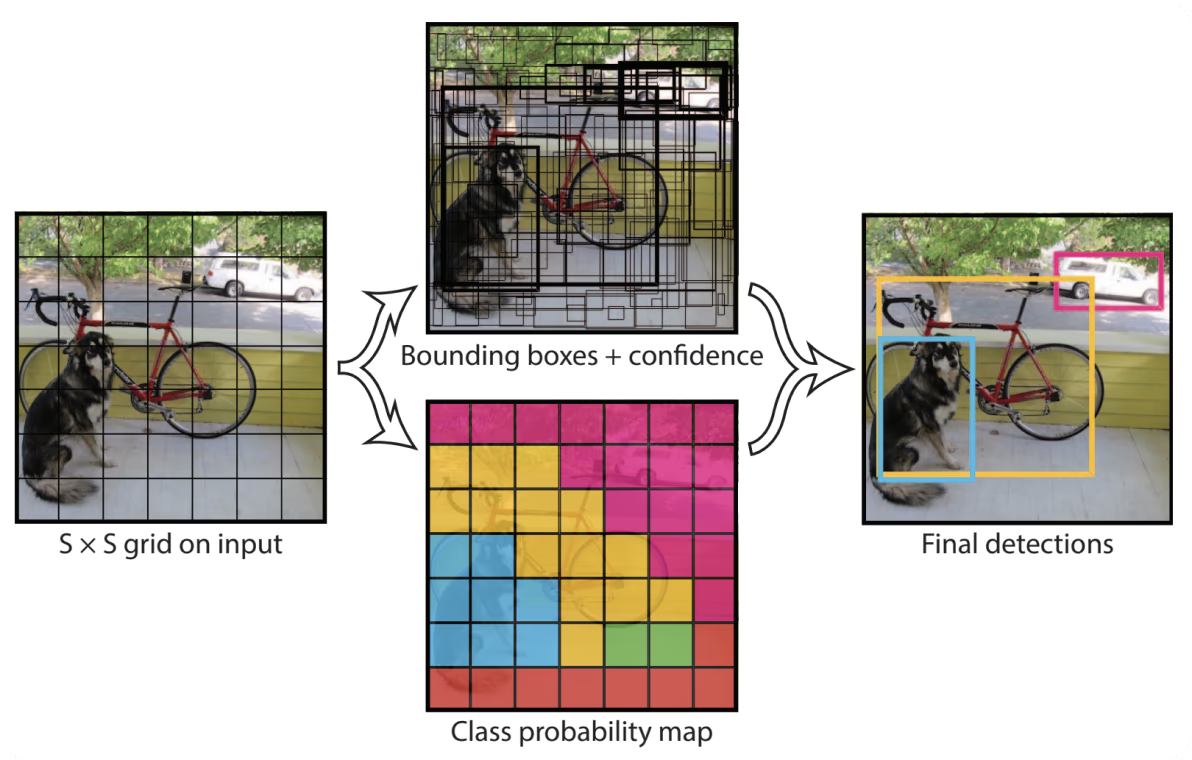
Fig 4. Descripción general de cómo funciona YOLO.
La introducción de YOLO en las aplicaciones de visión artificial hizo que la detección de objetos fuera mucho más rápida y eficiente que los modelos anteriores. Debido a su velocidad y precisión, YOLO se convirtió rápidamente en una opción popular para soluciones en tiempo real en industrias como la fabricación, la sanidad y la robótica.
Otro punto importante a destacar es que, como YOLO era de código abierto, los desarrolladores e investigadores pudieron mejorarlo continuamente, lo que dio lugar a versiones aún más avanzadas.
Link to this sectionEl camino de YOLO a YOLO11#
Los modelos YOLO han mejorado constantemente con el paso del tiempo, basándose en los avances de cada versión. Junto con un mejor rendimiento, estas mejoras han hecho que los modelos sean más fáciles de usar para personas con diferentes niveles de experiencia técnica.
Por ejemplo, cuando se introdujo Ultralytics YOLOv5, el despliegue de modelos se simplificó con PyTorch, permitiendo que una gama más amplia de usuarios trabajara con IA avanzada. Combinó precisión y facilidad de uso, dando a más personas la capacidad de implementar la detección de objetos sin necesidad de ser expertos en programación.
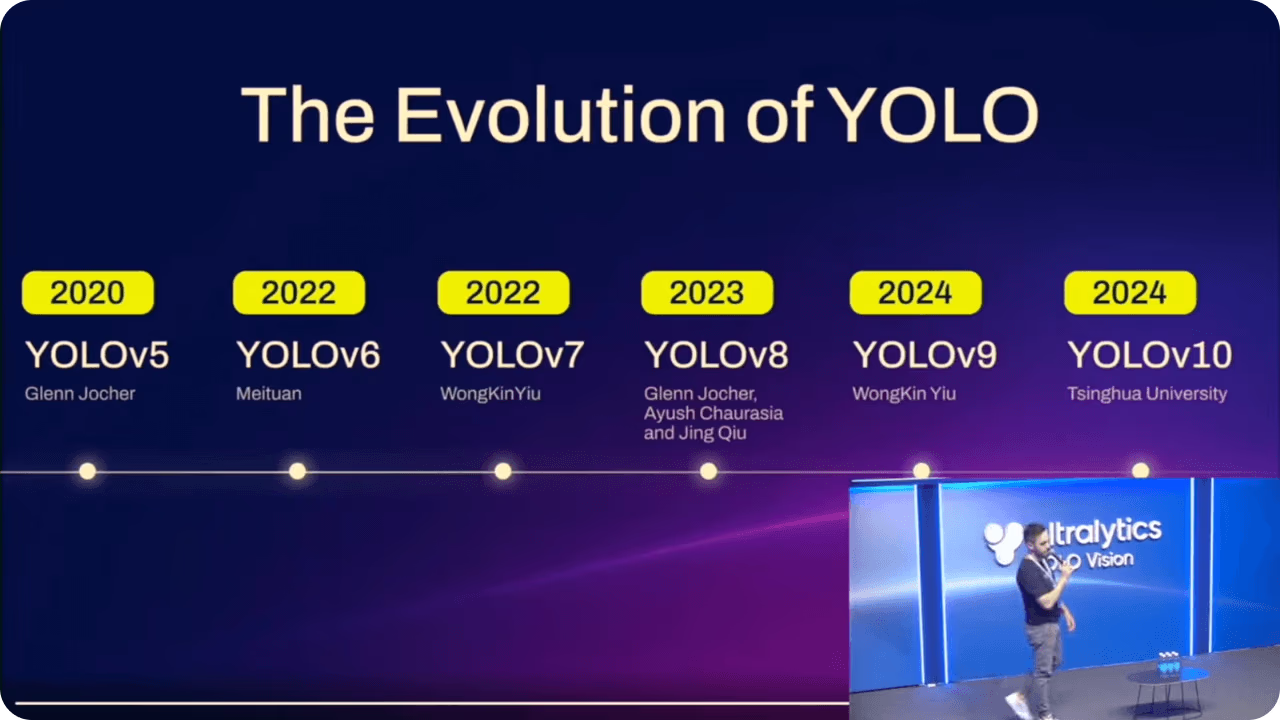
Fig 5. La evolución de los modelos YOLO.
Ultralytics YOLOv8 continuó este progreso añadiendo soporte para tareas como la segmentación de instancias y haciendo que los modelos fueran más flexibles. Se hizo más fácil utilizar YOLO tanto para aplicaciones básicas como para las más complejas, lo que lo hace útil en toda una serie de escenarios.
Con el último modelo, Ultralytics YOLO11, se han realizado nuevas optimizaciones. Al reducir el número de parámetros a la vez que mejora la precisión, es ahora más eficiente para tareas en tiempo real. Tanto si eres un desarrollador experimentado como si eres nuevo en la IA, YOLO11 ofrece un enfoque avanzado de la detección de objetos que es fácilmente accesible.
Link to this sectionConociendo YOLO11: Nuevas características y mejoras#
YOLO11, lanzado en el evento híbrido anual de Ultralytics, YOLO Vision 2024 (YV24), admite las mismas tareas de visión artificial que YOLOv8, como la detección de objetos, la segmentación de instancias, la clasificación de imágenes y la estimación de poses. Por lo tanto, los usuarios pueden cambiar fácilmente a este nuevo modelo sin necesidad de ajustar sus flujos de trabajo. Además, la arquitectura mejorada de YOLO11 hace que las predicciones sean aún más precisas. De hecho, YOLO11m logra una precisión media media (mAP) más alta en el conjunto de datos COCO con un 22% menos de parámetros que YOLOv8m.
YOLO11 también está diseñado para ejecutarse de forma eficiente en una gama de plataformas, desde teléfonos inteligentes y otros dispositivos de borde hasta sistemas en la nube más potentes. Esta flexibilidad garantiza un rendimiento fluido en diferentes configuraciones de hardware para aplicaciones en tiempo real. Además, YOLO11 es más rápido y eficiente, lo que reduce los costes computacionales y acelera los tiempos de inferencia. Tanto si utilizas el paquete de Python de Ultralytics como el HUB de Ultralytics sin código, es fácil integrar YOLO11 en tus flujos de trabajo existentes.
Link to this sectionEl futuro de los modelos YOLO y la detección de objetos#
El impacto de la detección de objetos avanzada en las aplicaciones en tiempo real y la IA de borde ya se nota en todos los sectores. A medida que sectores como el del petróleo y el gas, la sanidad y el comercio minorista dependen cada vez más de la IA, la demanda de una detección de objetos rápida y precisa sigue aumentando. YOLO11 pretende responder a esta demanda permitiendo una detección de alto rendimiento incluso en dispositivos con potencia de cálculo limitada.
A medida que crece la IA de borde, es probable que los modelos de detección de objetos como YOLO11 se vuelvan aún más esenciales para la toma de decisiones en tiempo real en entornos donde la velocidad y la precisión son críticas. Con las continuas mejoras en diseño y adaptabilidad, el futuro de la detección de objetos parece encaminado a traer aún más innovaciones en una gran variedad de aplicaciones.
Link to this sectionConclusiones clave#
La detección de objetos ha recorrido un largo camino, evolucionando desde métodos simples hasta las avanzadas técnicas de aprendizaje profundo que vemos hoy en día. Los modelos YOLO han sido el núcleo de este progreso, ofreciendo una detección en tiempo real más rápida y precisa en diferentes sectores. YOLO11 se basa en este legado, mejorando la eficiencia, reduciendo los costes computacionales y mejorando la precisión, lo que lo convierte en una opción fiable para una gran variedad de aplicaciones en tiempo real. Con los continuos avances en IA y visión artificial, el futuro de la detección de objetos parece brillante, con margen para aún más mejoras en velocidad, precisión y adaptabilidad.
¿Tienes curiosidad por la IA? ¡Mantente conectado con nuestra comunidad para seguir aprendiendo! Echa un vistazo a nuestro repositorio de GitHub para descubrir cómo estamos utilizando la IA para crear soluciones innovadoras en industrias como la manufactura y la atención sanitaria. 🚀






