Cómo mejorar el mAP del modelo en objetos pequeños: Una guía rápida
Aprende cómo mejorar el mAP del modelo en objetos pequeños con consejos prácticos sobre calidad de datos, aumento, estrategias de entrenamiento, evaluación y despliegue.
A medida que la adopción de la inteligencia artificial (IA), el aprendizaje automático y la visión artificial sigue creciendo, los sistemas de detección de objetos se utilizan en todas partes, desde cámaras de tráfico inteligentes hasta drones y herramientas de análisis minorista. A menudo, se espera que estos sistemas detecten objetos de todos los tamaños, ya sea un camión grande cerca de la cámara o un peatón diminuto a gran distancia.
Normalmente, localizar objetos grandes y claramente visibles es más sencillo. Por el contrario, detectar objetos pequeños es más difícil.
Cuando un objeto ocupa solo una porción diminuta de la imagen, hay muy poca información visual con la que trabajar. Un peatón lejano en una transmisión de tráfico o un vehículo pequeño capturado desde una vista aérea puede contener solo unos pocos píxeles, pero esos píxeles pueden transmitir información crítica.
Los modelos de visión artificial como los modelos Ultralytics YOLO confían en patrones visuales para reconocer objetos, y cuando esos patrones son limitados o poco claros, el rendimiento se resiente. Los detalles importantes pueden perderse durante el procesamiento, lo que hace que las predicciones sean más sensibles a errores de localización. Incluso un ligero desplazamiento en un cuadro delimitador puede convertir una detección correcta en una fallida.
Esta brecha queda clara al observar el rendimiento del modelo. La mayoría de los modelos de detección y segmentación manejan bien los objetos medianos y grandes, pero los objetos pequeños a menudo reducen la precisión general.
El rendimiento del aprendizaje profundo se mide habitualmente utilizando la precisión media, o mAP. Esta métrica refleja tanto la precisión de las detecciones como la calidad con la que los cuadros predichos se alinean con los objetos reales.
Combina la precisión, que muestra cuántos objetos predichos son correctos, y el recuerdo, que muestra cuántos objetos reales se detectan con éxito, a través de diferentes niveles de confianza y umbrales de Intersection over Union, o IoU (una métrica que mide cuánto se solapa el cuadro delimitador predicho con el cuadro real).
Anteriormente, hemos explorado la detección de objetos pequeños y por qué es un problema tan difícil para los modelos de visión artificial. En este artículo, desarrollaremos esa base y nos centraremos en cómo mejorar el mAP cuando hay objetos pequeños involucrados. ¡Empecemos!
Link to this section¿Por qué los objetos pequeños son más difíciles de detectar?#
Cuando se trata de aplicaciones que involucran detectores de objetos, un objeto pequeño se define por cuánto espacio ocupa en una imagen, no necesariamente por lo pequeño que parezca al ojo humano. Si ocupa solo una parte diminuta de la imagen, contiene muy poca información visual, lo que hace que sea más difícil para un algoritmo de visión artificial detectarlo con precisión.
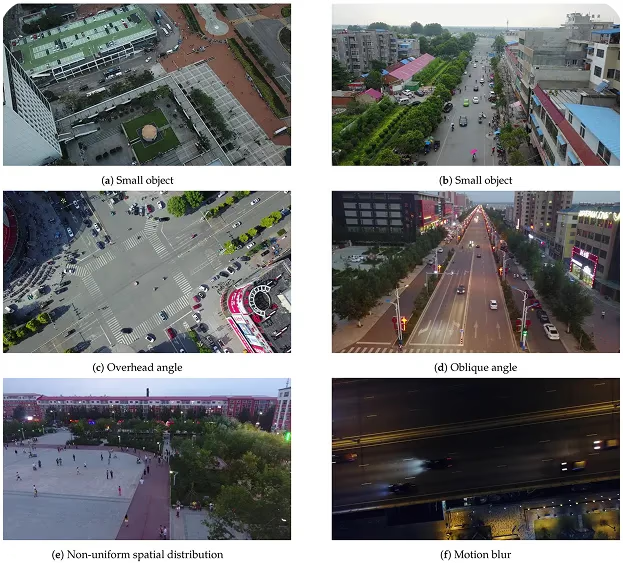
Fig 1. Imágenes de ejemplo que muestran objetos pequeños que ocupan áreas de píxeles limitadas (Fuente)
Con menos píxeles con los que trabajar, los detalles importantes como bordes, formas y texturas pueden ser poco claros o perderse fácilmente. A medida que la imagen es procesada por el modelo, se redimensiona y simplifica para resaltar patrones útiles.
Aunque esto ayuda al modelo a comprender la escena general, también puede reducir aún más los detalles finos. Para los objetos pequeños, esos detalles son a menudo esenciales para una detección correcta.
Estos desafíos se vuelven aún más evidentes al observar las métricas de evaluación. Los objetos pequeños son especialmente sensibles a los errores de localización. Incluso un cuadro delimitador ligeramente desalineado puede caer por debajo del umbral requerido de Intersection over Union, o IoU.
Cuando eso ocurre, una predicción que parece razonable puede contarse como incorrecta. Esto reduce tanto la precisión como el recuerdo, lo que en última instancia disminuye la precisión media, o mAP.
Debido a que estos factores están estrechamente relacionados, mejorar el rendimiento a menudo requiere pensar en todo el sistema. Eso significa equilibrar cuidadosamente la resolución de la imagen, la extracción de características, el diseño del modelo y los ajustes de evaluación para que los pequeños detalles visuales se conserven e interpreten mejor.
Link to this sectionLa importancia de la calidad del conjunto de datos y las anotaciones#
Cuando se trata de la detección de objetos pequeños, la calidad de un conjunto de datos a menudo marca la mayor diferencia en el rendimiento. Los objetos pequeños ocupan solo una parte diminuta de una imagen, lo que significa que hay muy poca información visual disponible para que el modelo aprenda de ella. Debido a esto, los datos de entrenamiento se vuelven especialmente importantes. Si el conjunto de datos no incluye suficientes ejemplos claros y representativos, el modelo de detección de objetos tendrá dificultades para reconocer patrones consistentes.
Los conjuntos de datos que funcionan bien para la detección de objetos pequeños suelen contener imágenes de alta resolución, apariciones frecuentes de objetivos pequeños y condiciones visuales consistentes. Aunque los conjuntos de datos genéricos como el conjunto de datos COCO son puntos de partida útiles, a menudo no coinciden con la escala, la densidad o el contexto de casos de uso específicos del mundo real. En tales casos, recopilar datos de entrenamiento específicos del dominio se vuelve necesario para mejorar el rendimiento del modelo.
La calidad de la anotación también juega un papel fundamental. Las anotaciones establecen la verdad fundamental al especificar las etiquetas de objeto correctas y las ubicaciones de los cuadros delimitadores que el modelo aprende a predecir.
Para objetos pequeños, los cuadros delimitadores deben dibujarse con cuidado y consistencia. Incluso diferencias leves en la colocación del cuadro pueden afectar notablemente la precisión de la localización porque los objetos pequeños son altamente sensibles a los cambios a nivel de píxel.
Las anotaciones pobres o inconsistentes pueden reducir significativamente el mAP. Si los objetos están mal etiquetados, el modelo aprende patrones incorrectos, lo que puede aumentar los falsos positivos.
Si los objetos aparecen en la imagen pero faltan en la verdad fundamental, las detecciones correctas pueden contarse como falsos positivos durante la evaluación. Ambas situaciones reducen el rendimiento general.
Curiosamente, investigaciones recientes indican que la precisión media para objetos pequeños a menudo permanece entre el 20 % y el 40 % en los puntos de referencia estándar, lo cual es significativamente menor que para los objetos más grandes. Esta brecha subraya la importancia del diseño del conjunto de datos y la consistencia de las anotaciones en la precisión general de la detección.
Link to this sectionEl aumento de datos puede desempeñar un papel clave en la mejora de la precisión#
Con una mejor comprensión de la importancia de la calidad del conjunto de datos y la consistencia de las anotaciones, recorramos cómo un modelo de detección de objetos puede aprender de manera más efectiva a partir de los datos existentes. Incluso cuando recopilar imágenes adicionales es difícil o costoso, todavía hay formas de mejorar el rendimiento haciendo un mejor uso de los datos ya disponibles.
Uno de los enfoques más prácticos es el aumento de datos. Tiene un papel especialmente importante en la detección de objetos pequeños porque los objetos pequeños proporcionan menos señales visuales para que el modelo aprenda. Al introducir variaciones controladas durante el entrenamiento, el aumento ayuda a que el modelo generalice mejor sin necesidad de recopilar nuevos datos.
El aumento de datos efectivo se centra en mantener los objetos pequeños claramente visibles. Técnicas como el redimensionamiento controlado, el recorte ligero y el mosaico de imágenes pueden hacer que los objetos pequeños destaquen más mientras conservan su forma y apariencia. El objetivo es ayudar al modelo a ver los objetos pequeños con más frecuencia y bajo condiciones ligeramente diferentes, sin cambiar su aspecto en situaciones reales.
Sin embargo, el aumento debe aplicarse con cuidado. Algunas transformaciones pueden reducir la visibilidad de los objetos pequeños o cambiar su apariencia de formas que es poco probable que ocurran en datos reales. Cuando esto sucede, el modelo puede tener dificultades para aprender límites de objeto precisos.
Link to this sectionAumento de datos más inteligente con IA generativa#
Otro tipo interesante de aumento de datos que se está volviendo más popular es el uso de IA generativa para crear datos de entrenamiento sintéticos. En lugar de depender de imágenes recopiladas y etiquetadas manualmente, los equipos ahora pueden generar escenas realistas que simulan entornos específicos, tamaños de objeto, condiciones de iluminación y variaciones de fondo.
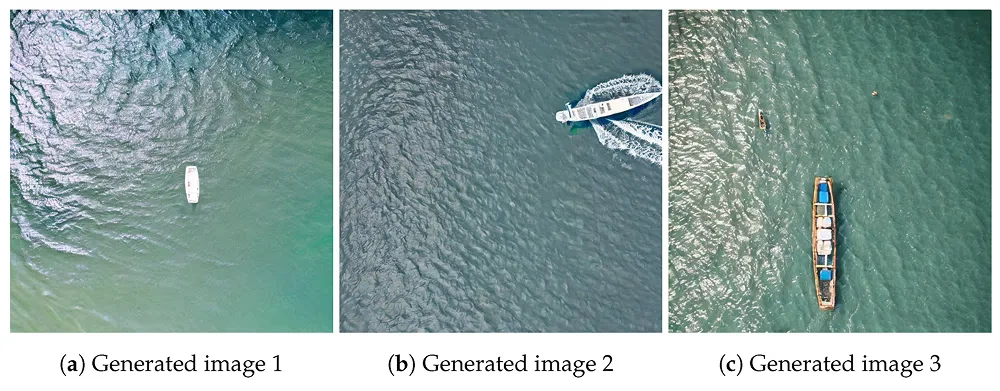
Fig 2. Un vistazo a las imágenes aéreas sintéticas utilizadas para el aumento de datos (Fuente)
Este enfoque es particularmente útil para la detección de objetos pequeños, donde los ejemplos del mundo real pueden ser difíciles de capturar de manera consistente. Al controlar cómo aparecen los objetos pequeños en las imágenes sintéticas, como ajustar la escala, la densidad y la ubicación, es posible exponer los modelos a una gama más amplia de escenarios de entrenamiento.
Cuando se combina cuidadosamente con datos reales, el aumento sintético puede mejorar la robustez del modelo, reducir los costos de recopilación de datos y respaldar mejoras de rendimiento más específicas.
Link to this sectionOpciones de entrenamiento del modelo que pueden afectar el mAP de objetos pequeños#
Además de la calidad del conjunto de datos y la consistencia de las anotaciones, las opciones de entrenamiento del modelo también tienen un fuerte impacto en el rendimiento de la detección de objetos pequeños.
Aquí hay algunas de las estrategias de entrenamiento clave a considerar:
- Empieza con modelos preentrenados: Un modelo preentrenado, como Ultralytics YOLO26, ya ha aprendido patrones visuales generales a partir de grandes conjuntos de datos de imágenes. Esto proporciona un punto de partida sólido en lugar de entrenar desde cero, lo cual es especialmente útil al detectar objetos pequeños con datos limitados.
- Utiliza el aprendizaje por transferencia estratégicamente: El aprendizaje por transferencia significa adaptar un modelo preentrenado a tu conjunto de datos específico. Ayuda a que el modelo se centre en tus objetos pequeños mientras reduce el sobreajuste (memorizar los datos de entrenamiento en lugar de aprender patrones generales).
- Aborda el desequilibrio de clases: Si los objetos pequeños aparecen con menos frecuencia que los más grandes, el modelo puede priorizar el aprendizaje de los objetos más grandes. Las técnicas como la ponderación de clases o las estrategias de muestreo ayudan a garantizar que los objetos pequeños no sean ignorados.
- Ajusta los umbrales de confianza y IoU: Los objetos pequeños son sensibles a errores de localización menores. Ajustar estos umbrales ayuda a evaluar e interpretar mejor el rendimiento de los objetos pequeños durante la validación y la inferencia.
Link to this sectionConsideraciones sobre la arquitectura del modelo para la detección de objetos pequeños#
Si bien puedes usar un modelo general de detección de objetos para tareas de objetos pequeños, también existen arquitecturas de modelo diseñadas específicamente para mejorar la detección de objetos pequeños. Por ejemplo, existen variantes de modelo P2 del modelo Ultralytics YOLOv8 que están optimizadas para preservar el detalle espacial fino.
YOLOv8 procesa imágenes a múltiples escalas reduciéndolas gradualmente a medida que avanzan más profundamente en la red. Esto ayuda al modelo a comprender la escena general, pero también reduce los detalles finos.
Cuando un objeto ya es muy pequeño, la información visual importante puede desaparecer durante este proceso. La variante P2 de Ultralytics YOLOv8 soluciona esto mediante el uso de un stride de 2 en su pirámide de características.
Una pirámide de características es la parte del modelo que analiza la imagen a múltiples resoluciones internas para que pueda detectar objetos de diferentes tamaños. Con un stride de 2, la imagen se reduce más gradualmente en esta etapa, lo que permite preservar una mayor parte del detalle original a nivel de píxel.
Debido a que se preserva más detalle espacial, los objetos pequeños retienen una estructura más visible dentro de la red. Esto facilita que el modelo localice y detecte objetos que ocupan solo unos pocos píxeles, lo que puede ayudar a mejorar el mAP de los objetos pequeños.
Link to this sectionEvaluación consciente del tamaño para la detección de objetos pequeños#
Aunque la precisión media resume el rendimiento general del modelo, no siempre muestra qué tan bien maneja un modelo los objetos de diferentes tamaños. Para los objetos pequeños, el rendimiento a menudo está limitado por la precisión de la localización más que solo por la clasificación, lo que significa que los ligeros desplazamientos del cuadro delimitador pueden afectar significativamente los resultados.
En otras palabras, el modelo puede identificar correctamente la clase del objeto, pero si el cuadro delimitador predicho está ligeramente desalineado, la detección aún puede considerarse incorrecta. Debido a que los objetos pequeños cubren solo una pequeña cantidad de píxeles, incluso un cambio menor en la colocación del cuadro puede reducir significativamente el solapamiento entre el cuadro predicho y la verdad fundamental. Como resultado, las puntuaciones de evaluación pueden disminuir incluso cuando el objeto se identificó correctamente.
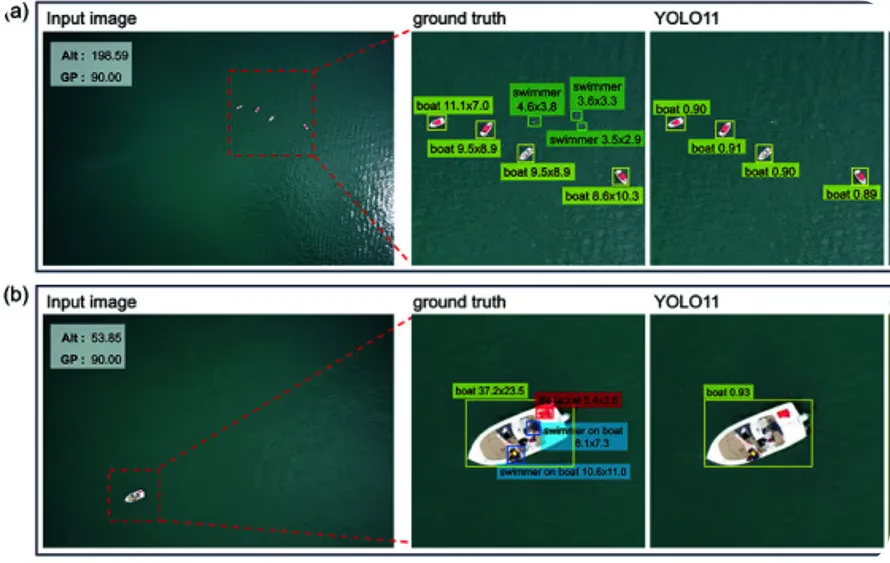
Fig 3. Evaluar la detección de objetos pequeños puede ser complicado (Fuente)
Un enfoque más informativo es evaluar el rendimiento por tamaño de objeto. La mayoría de los puntos de referencia ampliamente utilizados informan la precisión media por separado para objetos pequeños, medianos y grandes.
Este desglose específico por tamaño proporciona una visión más clara de dónde el modelo funciona bien y dónde tiene dificultades. En la práctica, la AP de objetos pequeños a menudo se queda atrás del mAP general, destacando los desafíos de localización que pueden no ser evidentes en las métricas agregadas.
Link to this sectionConsidera las restricciones de despliegue y las compensaciones del mundo real#
El rendimiento del modelo a menudo cambia al pasar de entornos de prueba controlados al despliegue en el mundo real. Factores como la resolución de la imagen, la velocidad de procesamiento y el hardware disponible introducen compensaciones que afectan directamente a la detección de objetos pequeños.
Por ejemplo, aumentar la resolución de entrada puede mejorar el mAP de los objetos pequeños porque los objetivos pequeños ocupan más píxeles y conservan más detalles. Sin embargo, una resolución más alta también aumenta el uso de memoria y el tiempo de procesamiento. Esto puede ralentizar la inferencia y aumentar los costos operativos.
Fig 4. Desafíos de despliegue de la detección de objetos pequeños. Imagen del autor.
Las opciones de hardware juegan un papel clave en la gestión de estas compensaciones. Las GPU más potentes permiten modelos más grandes y un procesamiento más rápido, pero los entornos de despliegue, especialmente los dispositivos de borde, a menudo tienen recursos de cómputo y memoria limitados.
Las aplicaciones en tiempo real añaden otra restricción: mantener una latencia baja puede requerir reducir el tamaño del modelo o la resolución de entrada, lo que puede afectar negativamente al recuerdo de objetos pequeños. En última instancia, las decisiones de despliegue requieren equilibrar el rendimiento de la detección con las limitaciones del hardware, los requisitos de velocidad y el costo general.
Link to this sectionResumen: Mejorando el mAP del modelo con objetos pequeños#
Mejorar la detección de objetos pequeños requiere un enfoque práctico y estructurado, especialmente cuando se trabaja en entornos del mundo real. Aquí tienes una descripción general de los pasos principales a tener en cuenta:
- Audita la calidad de tu conjunto de datos: Asegúrate de que tu conjunto de datos incluya suficientes ejemplos de objetos pequeños, utilice imágenes de alta resolución cuando sea posible y refleje las condiciones en las que se desplegará el modelo.
- Verifica la consistencia de las anotaciones: Asegúrate de que los cuadros delimitadores sean precisos, completos y estén etiquetados de manera consistente. Las anotaciones inconsistentes pueden limitar directamente el rendimiento de la localización.
- Ajusta los parámetros de entrenamiento deliberadamente: Modifica el tamaño del lote, el número de épocas y los ajustes de optimización cuidadosamente para que los objetos pequeños estén representados adecuadamente durante el entrenamiento.
- Itera paso a paso: Realiza ajustes controlados, mide su impacto y refina tu enfoque. La iteración constante y basada en datos conduce a mejoras continuas con el tiempo.
Link to this sectionConclusiones clave#
Mejorar el mAP para objetos pequeños requiere un enfoque estructurado y basado en datos en lugar de ajustes aleatorios. Las mejoras reales provienen de combinar buenos datos, anotaciones consistentes, entrenamiento cuidadoso y los métodos de evaluación correctos. En proyectos del mundo real, las pruebas constantes y los cambios pequeños y medibles son los que conducen a una detección de objetos pequeños mejor y más confiable con el tiempo.
Únete a nuestra creciente comunidad y explora nuestro repositorio de GitHub para obtener recursos prácticos de IA. Para empezar a construir hoy con IA de visión, explora nuestras opciones de licencia. Descubre cómo la IA en la agricultura está transformando el sector agrícola y cómo la IA de visión en robótica está dando forma al futuro visitando nuestras páginas de soluciones.






