Comprendre la détection de contours en traitement d'image
Détection de contours en traitement d'image. Apprends Sobel, Canny et d'autres algorithmes de détection de contours pour détecter avec précision les bords et obtenir une reconnaissance robuste.
En tant qu'humains, nous reconnaissons naturellement les contours des objets, suivons leurs courbes et remarquons les textures sur leurs surfaces lorsque nous regardons une image. Pour un ordinateur, cependant, la compréhension commence au niveau des pixels individuels.
Un pixel, la plus petite unité d'une image numérique, stocke la couleur et la luminosité en un point unique. En suivant les variations de ces valeurs de pixels à travers une image, un ordinateur peut détecter des motifs qui révèlent des détails clés.
En particulier, le traitement d'image utilise les données des pixels pour mettre en évidence les caractéristiques essentielles et supprimer les éléments distracteurs. Une technique courante de traitement d'image est la détection de contours, qui identifie les points où la luminosité ou la couleur change brusquement pour délimiter les objets, marquer les frontières et ajouter de la structure.
Cela permet aux ordinateurs de séparer les formes, de mesurer les dimensions et d'interpréter comment les parties d'une scène se connectent. La détection de contours est souvent la première étape d'une analyse d'image avancée.
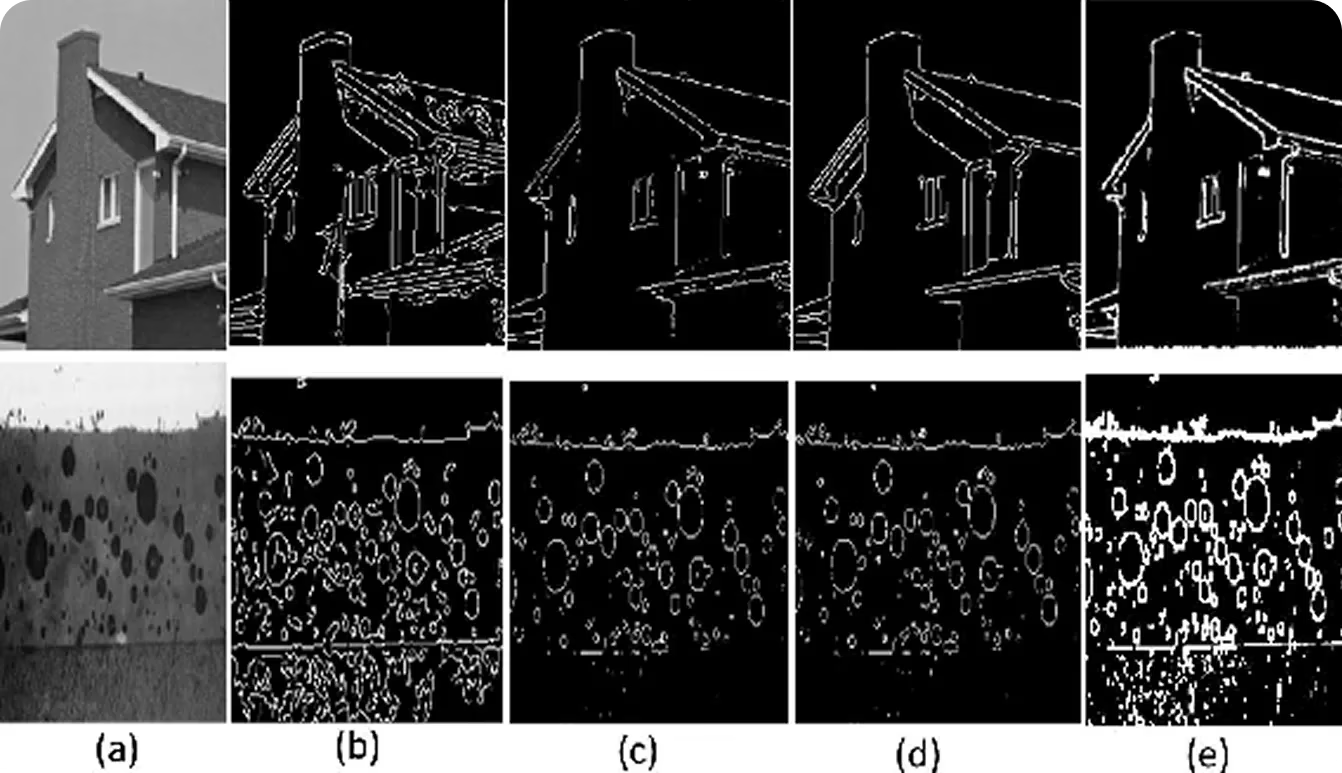
Fig 1. Exemple montrant l'image originale aux côtés des sorties de différentes méthodes de détection de contours. (Source)
Dans cet article, nous allons examiner ce qu'est la détection de contours, comment elle fonctionne et ses applications concrètes. Commençons !
Link to this sectionConcepts de détection de contours#
La détection de contours se concentre sur la recherche d'endroits dans une image où la luminosité ou la couleur change de manière notable d'un point à l'autre. Si le changement est faible, la zone apparaît lisse. Si le changement est net, il marque souvent la frontière entre deux régions différentes.
Voici quelques-unes des raisons pour lesquelles ces changements de pixels se produisent :
- Discontinuités de la normale à la surface : Lorsque deux surfaces se rencontrent selon un angle, comme le coin d'un mur ou l'arête d'une boîte, ce changement net d'orientation produit une frontière claire dans l'image.
- Discontinuités de profondeur : Elles apparaissent là où les objets sont à des distances différentes de la caméra, produisant une séparation visible qui aide le système à les distinguer.
- Changements de couleur ou de texture de surface : Cela se produit lorsqu'une zone a une couleur ou une texture différente de la zone adjacente, créant une séparation visible.
- Changements d'éclairage : Cela provient des changements de lumière, y compris les ombres ou les reflets sur les surfaces, créant des séparations visibles même lorsque les surfaces elles-mêmes sont lisses ou continues.
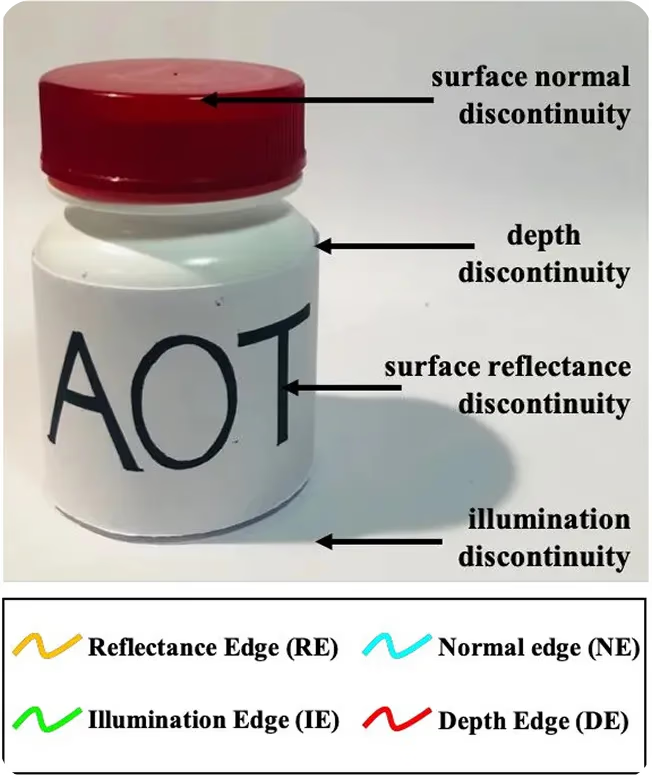
Fig 2. Différents types de discontinuités de contour dans les images. (Source)
Link to this sectionComment fonctionne la reconnaissance par détection de contours#
La détection de contours commence généralement par transformer une image couleur en une image en niveaux de gris, afin que chaque point n'indique que la luminosité. Cela facilite la tâche de l'algorithme pour se concentrer sur les différences de clarté et d'obscurité plutôt que sur la couleur.
Ensuite, des filtres spéciaux peuvent scanner l'image pour trouver les endroits où la luminosité change soudainement. Ces filtres calculent la pente du changement de luminosité, appelée le gradient. Un gradient plus élevé est causé par une plus grande différence entre les points voisins, ce qui signale souvent un contour.
L'algorithme affine ensuite l'image, en supprimant les petits détails et en ne conservant que les lignes et les formes les plus importantes. Le résultat est un contour clair et une image de sortie qui peut être utilisée pour une analyse plus approfondie.
Link to this sectionÉvolution de la détection de contours et du traitement d'image#
Avant d'entrer dans les détails de la détection de contours, discutons de la façon dont elle s'est développée au fil du temps.
Le traitement d'image a commencé par des méthodes simples basées sur des règles comme le seuil et le filtrage pour nettoyer et améliorer les images. À l'ère analogique, cela signifiait travailler avec des photographies ou des pellicules en utilisant des filtres optiques, des loupes ou des traitements chimiques pour faire ressortir les détails.
Des techniques comme l'ajustement du contraste, la réduction du bruit, l'ajustement de l'intensité de l'image et la détection de contours de base ont aidé à rendre les images d'entrée plus claires et à mettre en évidence les formes et les textures. Dans les années 1960 et 70, le passage du traitement analogique au numérique a ouvert la voie à l'analyse moderne dans des domaines comme l'astronomie, l'imagerie médicale et la surveillance par satellite.
Dans les années 80 et 90, des ordinateurs plus rapides ont permis d'aborder des tâches plus complexes telles que l'extraction de caractéristiques, la détection de formes et la reconnaissance d'objets de base. Des algorithmes comme l'opérateur Sobel et Canny ont offert une détection de contours plus précise, tandis que la reconnaissance de formes trouvait des applications partout, de l'automatisation industrielle à la lecture de texte imprimé par reconnaissance optique de caractères.
Link to this sectionDétection de contours et vision par ordinateur au 21e siècle#
Aujourd'hui, les avancées technologiques constantes ont conduit au développement de la vision par ordinateur. L'IA de vision, ou vision par ordinateur, est une branche de l'IA qui se concentre sur l'apprentissage des machines pour interpréter et comprendre les informations visuelles.
Alors que le traitement d'image traditionnel, comme le double seuillage (qui rend les images plus claires en conservant les contours forts et en supprimant les faibles) et la détection de contours, suivait des règles fixes et ne pouvait gérer que des tâches spécifiques, la vision par ordinateur utilise des modèles axés sur les données qui peuvent apprendre à partir d'exemples et s'adapter à de nouvelles situations.
De nos jours, les systèmes d'imagerie vont bien au-delà de l'amélioration des images ou de la détection de contours. Ils peuvent reconnaître des objets, suivre les mouvements et comprendre le contexte d'une scène entière.
L'une des techniques clés qui rendent cela possible est la convolution. Une opération de convolution est un processus où de petits filtres (aussi appelés noyaux) scannent une image pour trouver des motifs importants comme des contours, des coins et des textures. Ces motifs deviennent les blocs de construction que les modèles de vision par ordinateur utilisent pour reconnaître et comprendre les objets.
Par exemple, les modèles de vision par ordinateur comme Ultralytics YOLO11 utilisent ces caractéristiques basées sur la convolution pour effectuer des tâches avancées telles que la segmentation d'instance. C'est étroitement lié à la détection de contours car la segmentation d'instance nécessite de délimiter avec précision les frontières de chaque objet dans une image.
Alors que la détection de contours se concentre sur la recherche de changements d'intensité dans les pixels de contour pour marquer les bords des objets, la segmentation d'instance s'appuie sur cette idée pour détecter les contours, classer et séparer chaque objet dans sa propre région.

Fig 3. Un aperçu de l'utilisation de YOLO11 et de la segmentation d'instance. (Source)
Link to this sectionAlgorithmes et approches de détection de contours#
Même avec la croissance de la vision par ordinateur, le traitement d'image reste une partie importante de nombreuses applications. C'est parce que la vision par ordinateur s'appuie souvent sur des étapes de prétraitement d'image de base.
Avant de détecter des objets ou de comprendre une scène, les systèmes nettoient généralement l'image, réduisent le bruit et trouvent des contours pour faire ressortir les détails clés. Ces étapes rendent les modèles avancés plus précis et efficaces.
Ensuite, explorons certains des algorithmes de traitement d'image les plus courants utilisés pour détecter les contours et leur fonctionnement.
Link to this sectionDétection de contours de Sobel#
La détection de contours de Sobel est une méthode clé utilisée pour trouver les contours des objets dans une image. Au lieu d'analyser chaque détail à la fois, elle se concentre sur les zones où la luminosité change brusquement d'un pixel au pixel voisin.
Ces changements soudains marquent généralement le point où un objet se termine et un autre commence, ou là où un objet rencontre l'arrière-plan. En isolant ces contours, Sobel transforme une image complexe en un contour plus propre qui est plus facile à traiter par d'autres systèmes pour des tâches comme le suivi des mouvements, la détection des formes ou la reconnaissance des objets.
Tu peux considérer la détection de contours de Sobel comme un détecteur de gradient qui mesure comment l'intensité change à travers une image. Fondamentalement, cela fonctionne via une opération de convolution : faire glisser de petites matrices, appelées noyaux, à travers l'image et calculer des sommes pondérées des valeurs de pixels voisins.
Ces noyaux sont conçus pour mettre en évidence les changements de luminosité le long des directions horizontale et verticale. Contrairement aux modèles d'apprentissage profond, où les noyaux sont appris à partir de données, Sobel utilise des noyaux fixes pour mettre efficacement en évidence les contours sans nécessiter d'entraînement.
Voici un examen plus approfondi du fonctionnement de la méthode de détection de contours de Sobel :
- Utilisation de deux filtres 3x3 : Cette méthode utilise deux petites grilles 3x3, appelées filtres. Imagine-les comme des pochoirs qui glissent sur l'image dans les directions horizontale (axe x) et verticale (axe y). Une grille est conçue pour trouver les contours horizontaux, et l'autre pour les contours verticaux.
- Calcul du gradient : Chaque filtre trouve la rapidité avec laquelle la luminosité change et la direction du gradient. Un grand changement signifie un contour possible.
- Combinaison des résultats : Les résultats horizontaux et verticaux sont combinés pour déterminer la force globale du contour et la direction à chaque pixel.
- Détection des contours : Les pixels avec une magnitude de gradient élevée sont marqués comme des contours forts.
- Délimitation des frontières : Ces contours aident à définir les formes des objets et à séparer les différentes régions dans l'image.
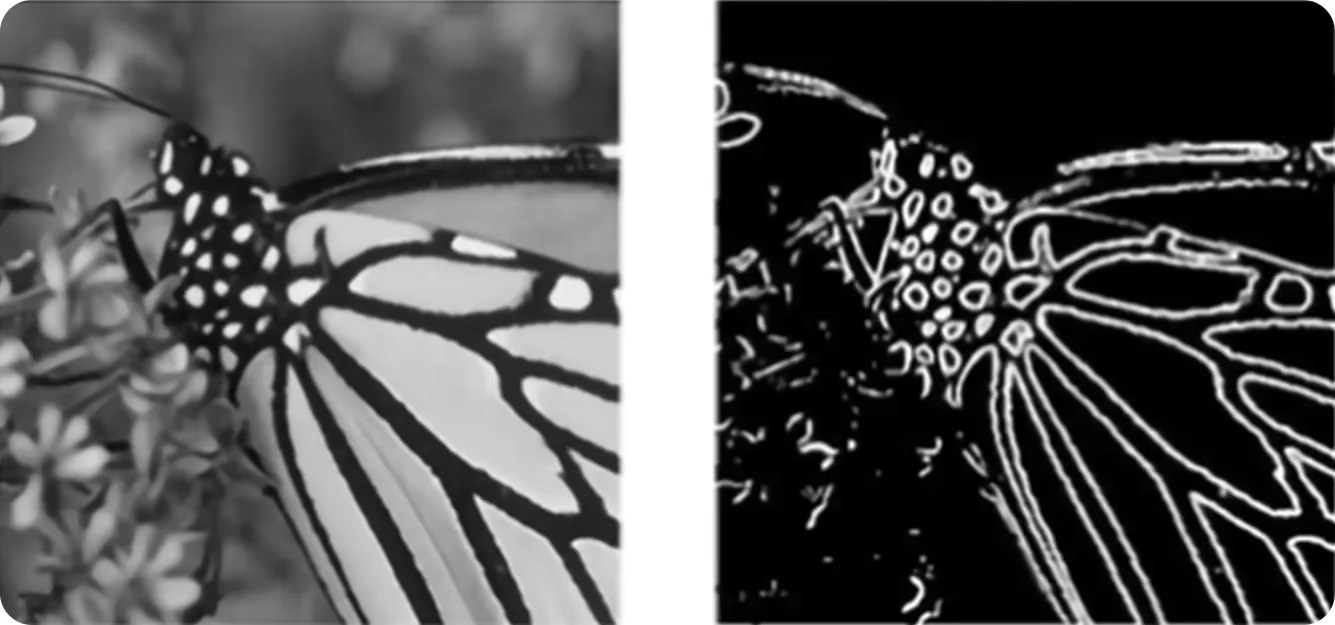
Fig 4. La détection de contours de Sobel peut mettre en évidence les principaux contours d'une image d'entrée et produire une carte de contours. (Source)
Link to this sectionDétection de contours de Canny#
La détection de contours de Canny est une autre méthode populaire pour trouver des contours dans une image. Elle est connue pour produire des contours propres et précis. Contrairement aux techniques de détection de contours de base, elle suit une série d'étapes soigneusement conçues pour filtrer le bruit, accentuer les frontières et se concentrer sur les contours les plus importants.
Voici un aperçu rapide du fonctionnement d'un détecteur de contours de Canny :
- Lissage de l'image : L'image est d'abord floutée avec un filtre gaussien, une technique de lissage qui réduit le bruit et les petits détails qui pourraient être confondus avec des contours.
- Détection des changements de luminosité : L'algorithme scanne ensuite les changements brusques de luminosité, en utilisant des calculs de gradient pour mesurer la force et la direction de ces changements.
- Affinement des contours : Seuls les points les plus forts le long de chaque ligne détectée sont conservés, tandis que les points plus faibles sont supprimés, résultant en des contours nets et propres.
- Classification des contours : Chaque pixel est étiqueté comme fort, faible ou non-contour, basé sur des valeurs seuils de changement de luminosité.
- Nettoyage final : Les contours faibles connectés à des contours forts sont conservés ; tous les autres sont écartés, ne laissant que des frontières claires et connectées.
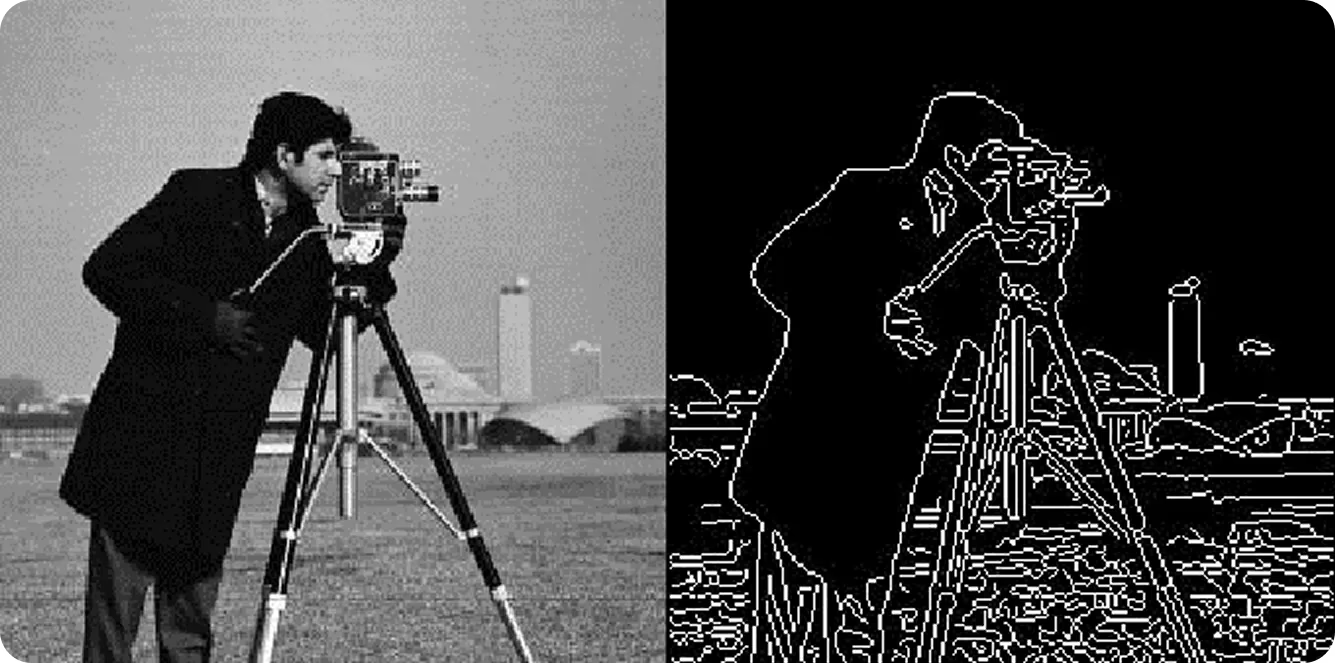
Fig 5. Image originale et son image de sortie respective après utilisation du détecteur de contours de Canny. (Source)
Parce qu'elle fournit des résultats précis tout en filtrant le bruit, la détection de contours de Canny est largement utilisée dans les domaines où la précision compte. Par exemple, elle est utilisée dans des secteurs comme l'imagerie médicale, la cartographie par satellite, la numérisation de documents et la vision robotique.
Link to this sectionDétection de contours basée sur le gradient vs basée sur Gaussienne#
Jusqu'à présent, les deux exemples de détection de contours que nous avons examinés sont Sobel et Canny. Bien que les deux visent à trouver des contours, ils abordent le problème différemment.
Les méthodes basées sur le gradient (comme Sobel, Prewitt et Scharr) détectent les contours en recherchant des changements brusques de luminosité, connus sous le nom de gradient. Elles scannent l'image et marquent les endroits où ce changement est le plus fort. Ces méthodes sont simples, rapides et fonctionnent bien lorsque les images sont claires. Cependant, elles sont sensibles au bruit - de minuscules variations de luminosité peuvent être confondues avec des contours.
Les méthodes basées sur Gaussienne (comme Canny ou Laplacien de Gaussienne) ajoutent une étape supplémentaire pour gérer ce problème : flouter l'image d'abord. Ce lissage, souvent effectué avec un filtre gaussien, réduit les petites variations qui pourraient créer de faux contours. Après le lissage, ces méthodes recherchent toujours des changements de luminosité nets, mais les résultats sont plus propres et plus précis pour les images bruitées ou de basse qualité.
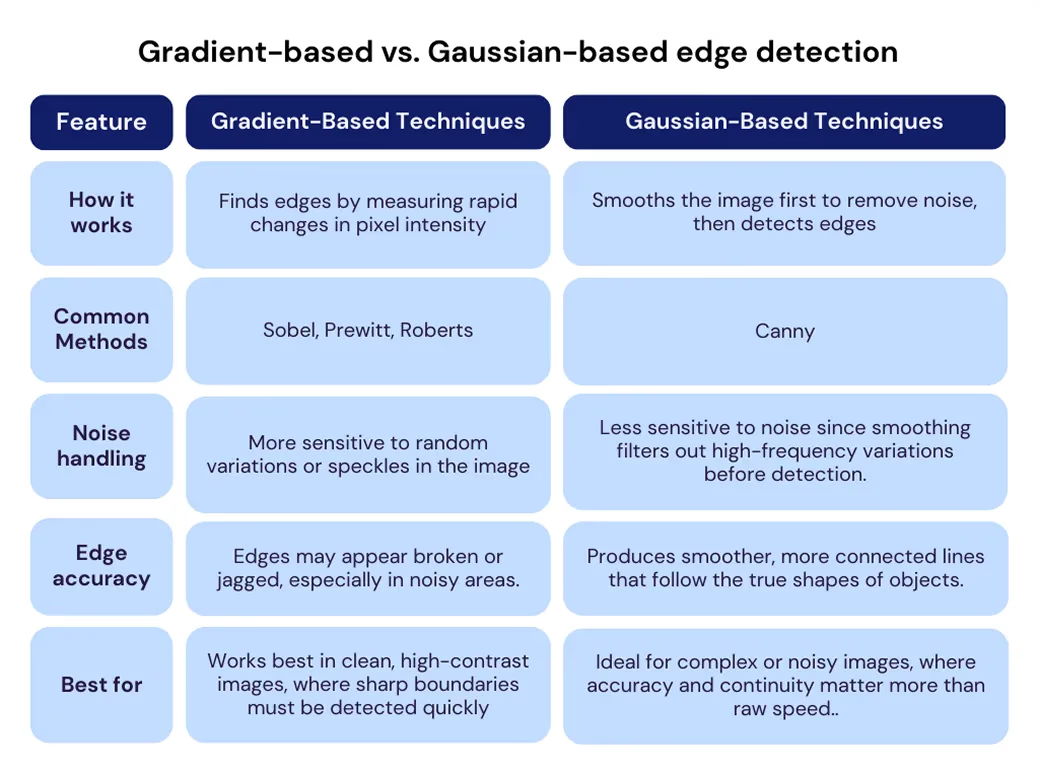
Fig 6. Détection de contours basée sur le gradient vs basée sur Gaussienne. Image par l'auteur.
Link to this sectionApplications concrètes de la détection de contours#
Avec une meilleure compréhension du fonctionnement de la détection de contours, explorons comment elle est appliquée dans des situations réelles.
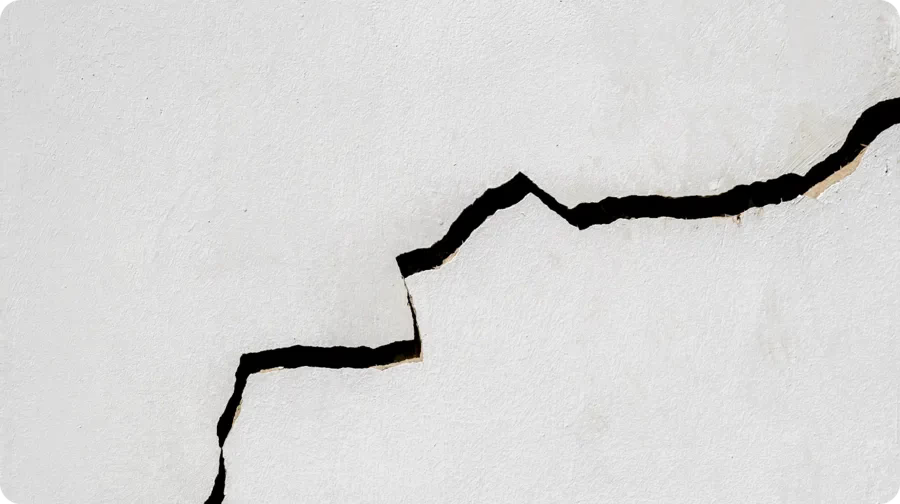
Link to this sectionUtilisation de la détection de contours pour identifier les fissures#
L'inspection de grandes structures en béton, telles que les ponts et les gratte-ciels, est souvent une tâche difficile et dangereuse. Ces structures peuvent s'étendre sur de longues distances ou atteindre des altitudes élevées, rendant les inspections traditionnelles lentes, coûteuses et risquées. Ces inspections nécessitent aussi généralement des échafaudages, un accès par corde, des mesures manuelles rapprochées ou la photographie.
Une approche intéressante a été explorée en 2019, lorsque des chercheurs ont testé une méthode plus sûre et plus rapide utilisant des drones équipés de caméras haute résolution pour capturer des images d'entrée détaillées des surfaces en béton. Ces images ont ensuite été traitées avec diverses techniques de détection de contours pour identifier automatiquement les fissures.
L'étude a montré que cette méthode réduisait considérablement le besoin d'accès humain direct aux zones dangereuses et accélérait les inspections. Cependant, sa précision dépendait encore de facteurs tels que les conditions d'éclairage, la clarté de l'image et la stabilité du fonctionnement du drone. Dans certains cas, une révision humaine était encore nécessaire pour éliminer les faux positifs.
Link to this sectionApplication de la détection de contours en imagerie médicale#
Les rayons X et les IRM contiennent souvent des perturbations visuelles appelées bruit, qui peuvent rendre les détails fins plus difficiles à voir. Cela devient un défi pour les médecins lorsqu'ils essaient de repérer les contours d'une tumeur, de tracer le contour d'un organe ou de surveiller des changements subtils au fil du temps.
Une récente étude en imagerie médicale a testé l'efficacité des méthodes de détection de contours courantes, comme Sobel, Canny, Prewitt et Laplacien, pour gérer les images bruitées. Les chercheurs ont ajouté différents types et niveaux de bruit aux images et ont vérifié avec quelle précision chaque méthode pouvait délimiter les caractéristiques importantes.
Canny produisait généralement les contours les plus propres, même lorsque le bruit était important, mais ce n'était pas la meilleure solution dans tous les cas. Certaines méthodes fonctionnaient mieux avec certains motifs de bruit, il n'existe donc pas de solution unique parfaite.
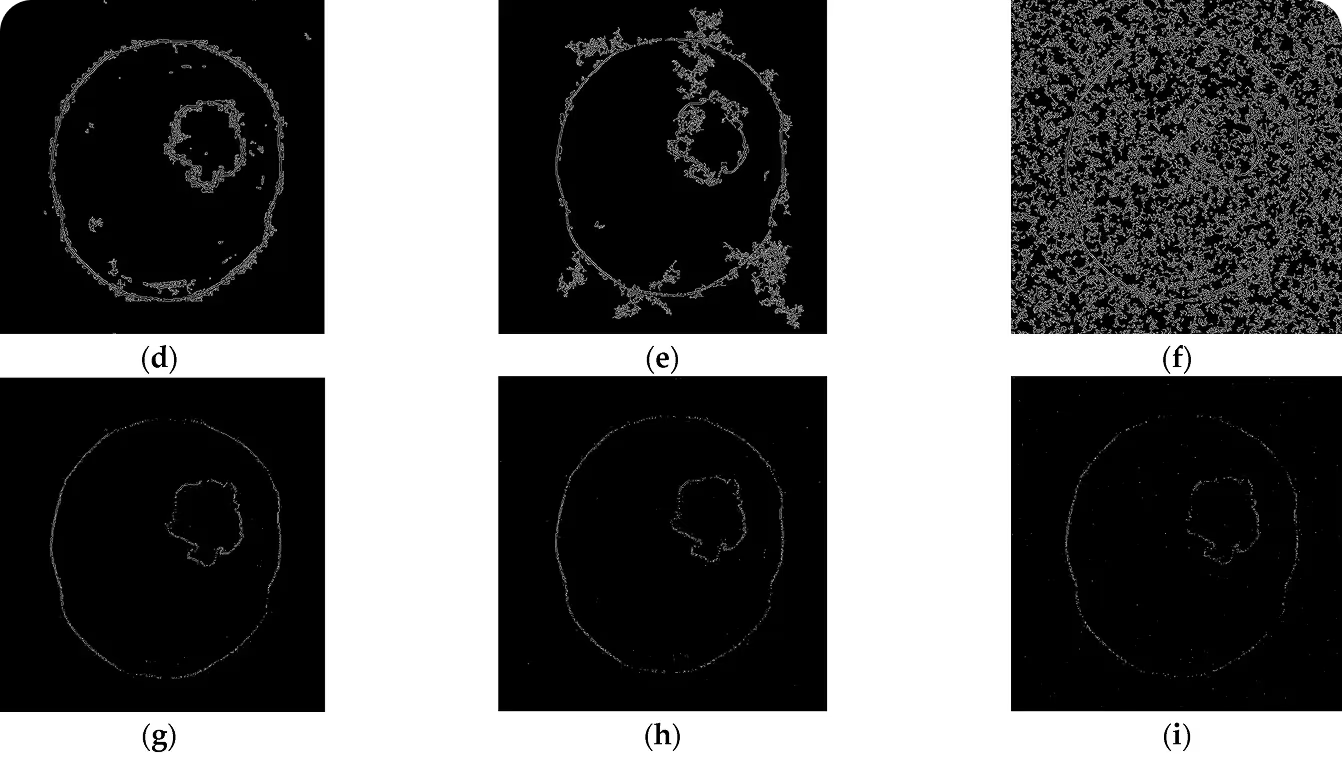
Fig 7. Canny (d–f) fournit des contours plus clairs que Sobel (g–i) à mesure que le bruit augmente. (Source)
Cela souligne pourquoi des technologies comme la vision par ordinateur sont si importantes. En combinant des algorithmes avancés et des modèles d'IA de vision, de telles solutions peuvent aller au-delà de la simple détection de contours pour fournir des résultats plus précis et fiables, même dans des conditions difficiles.
Link to this sectionAvantages de la détection de contours#
Voici quelques-uns des avantages de l'utilisation de la détection de contours et du traitement d'image :
- Meilleure compression des données : La détection de contours permet aux images d'être représentées en utilisant uniquement des caractéristiques clés, réduisant la taille du fichier tout en conservant les informations essentielles. Cela rend le stockage et la transmission plus efficaces.
- Localisation d'objets plus précise : En identifiant avec précision les frontières des objets, la détection de contours améliore la capacité des systèmes à localiser et à suivre les objets, bénéficiant à des applications comme l'IA de vision en robotique et les véhicules autonomes.
- Détection de caractéristiques multi-échelle : Les techniques de détection de contours peuvent analyser les images à différentes échelles, capturant à la fois les petits détails et les formes plus grandes. Cette flexibilité est utile dans des tâches variées, de l'analyse de texture à la compréhension de scène.
Link to this sectionLimites de l'utilisation du traitement d'image pour la détection de contours#
Bien qu'il y ait de nombreux avantages à la détection de contours dans le traitement d'image, cela comporte également quelques défis. Voici quelques-unes des limites clés à considérer :
- Problèmes avec les textures complexes : Dans les images avec des motifs complexes ou répétitifs, la détection de contours produit souvent de nombreux faux contours ou des contours non pertinents, ce qui complique l'analyse ultérieure et réduit la fiabilité.
- Sensibilité à l'éclairage : Les variations de luminosité, les ombres et les reflets peuvent amener les détecteurs de contours à interpréter à tort les changements d'éclairage comme des frontières d'objets, conduisant à des résultats incohérents.
- Aucune identification d'objet : Alors que les contours mettent en évidence où les objets commencent et se terminent, ils ne montrent pas ce que sont les objets. Un traitement supplémentaire est nécessaire pour attribuer une signification ou des étiquettes aux contours détectés.
Link to this sectionQuand la vision par ordinateur peut être utilisée pour la détection de contours#
La détection de contours est inspirée par la façon dont nos yeux et notre cerveau travaillent ensemble pour donner un sens au monde. En ce qui concerne la vision humaine, des neurones spécialisés dans le cortex visuel sont hautement sensibles aux contours, aux lignes et aux frontières.
Ces indices visuels nous aident à déterminer rapidement où un objet se termine et un autre commence. C'est pourquoi même un simple dessin au trait peut être instantanément reconnaissable - notre cerveau s'appuie fortement sur les contours pour identifier les formes et les objets.
La vision par ordinateur vise à imiter cette capacité mais va encore plus loin. Des modèles comme Ultralytics YOLO11 vont au-delà de la simple mise en évidence de contours et de l'amélioration d'image. Ils peuvent détecter des objets, les délimiter avec précision et suivre les mouvements en temps réel. Ce niveau de compréhension plus profond les rend essentiels dans des scénarios où la détection de contours seule ne suffit pas.
Link to this sectionUtiliser Ultralytics YOLO11 pour détecter les contours plus précisément#
Voici quelques tâches de vision par ordinateur clés prises en charge par YOLO11 qui s'appuient sur et vont au-delà de la détection de contours :
- Détection d'objets : Elle identifie et localise plusieurs objets dans une image ou une vidéo en dessinant des boîtes englobantes autour de chacun, donnant une vue claire de ce qui est présent et où chaque objet est positionné.
- Segmentation d'instance : Cela implique de décomposer les objets au niveau du pixel, en produisant des contours nets et précis même lorsque les objets se chevauchent ou ont des formes irrégulières.
- Estimation de pose : L'objectif ici est de déterminer la position, l'orientation ou la posture d'un objet ou d'une personne, ce qui aide à surveiller les mouvements ou à détecter des changements structurels au fil du temps.
- Suivi d'objets : Cette tâche suit un objet au fur et à mesure qu'il se déplace à travers les images vidéo, assurant une identification cohérente pour une observation précise sur le long terme.
- Classification d'images : Elle attribue des étiquettes aux objets ou aux images entières en fonction de leurs caractéristiques visuelles, ce qui facilite l'organisation et l'interprétation de grands ensembles de données.
Link to this sectionDétection des contours dans les infrastructures grâce à la vision par ordinateur#
Un bon exemple de vision par ordinateur améliorant une application qui reposait traditionnellement sur la détection des contours est la détection de fissures dans les infrastructures et les actifs industriels. Des modèles de vision par ordinateur comme YOLO11 peuvent être entraînés pour identifier précisément les fissures sur les routes, les ponts et les pipelines. La même technique peut également être appliquée à la maintenance des aéronefs, aux inspections de bâtiments et au contrôle qualité en fabrication, aidant à accélérer les inspections et à améliorer la sécurité.
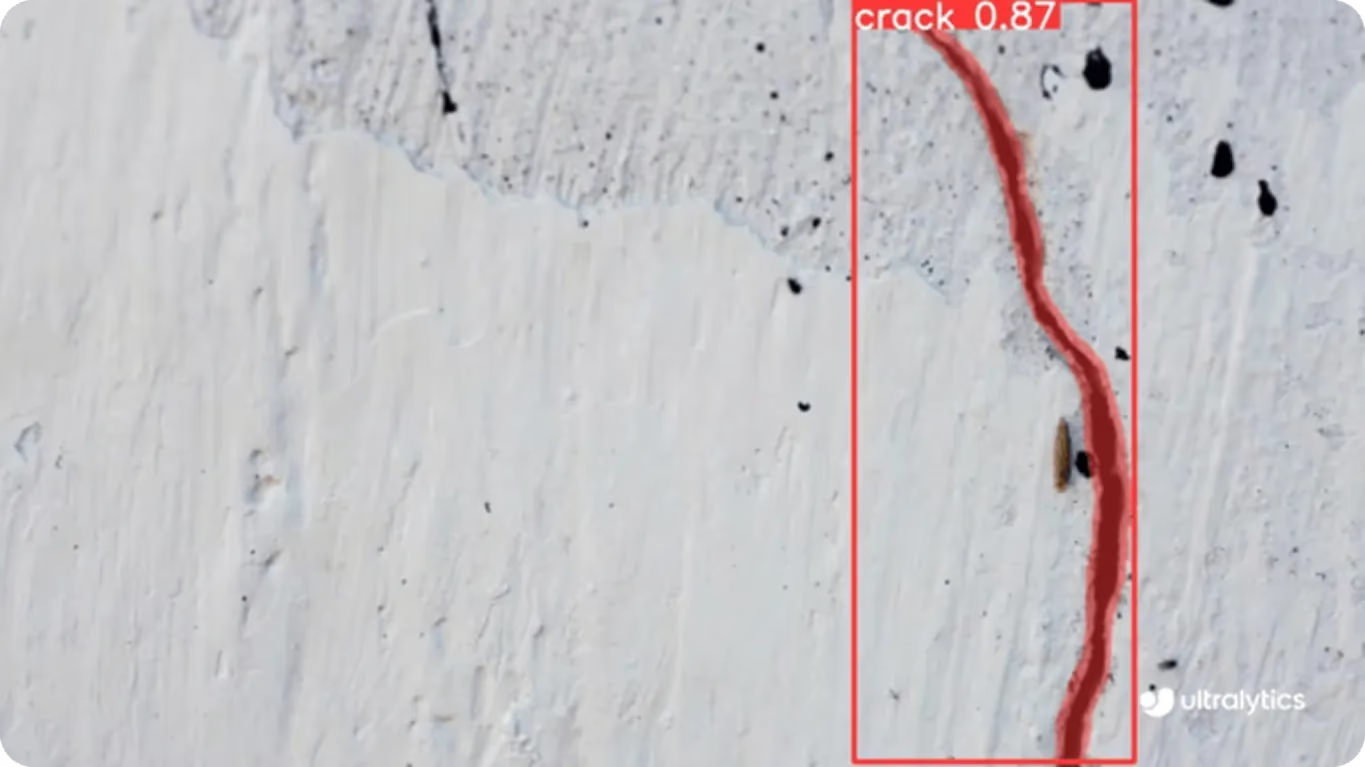
Fig 8. Un exemple d'utilisation de YOLO11 pour la segmentation de fissures. (Source)
Link to this sectionPoints clés#
La détection des contours a beaucoup évolué, passant de méthodes simples à des techniques avancées capables de repérer même des limites subtiles dans des images complexes. Elle aide à faire ressortir des détails importants, à mettre en évidence des zones clés et à préparer les images pour une analyse plus approfondie, ce qui en fait un élément central du traitement d'images.
En vision par ordinateur, la détection des contours joue un rôle important dans la définition des formes, la séparation des objets et l'extraction d'informations utiles. Elle est utilisée dans de nombreux domaines tels que l'imagerie médicale, les inspections industrielles, la conduite autonome et la sécurité pour offrir une compréhension visuelle précise et fiable.
Rejoins notre communauté et explore notre dépôt GitHub pour en découvrir davantage sur l'IA. Si tu cherches à démarrer ton propre projet d'IA visuelle, consulte nos options de licence. Découvre plus d'applications comme l'IA dans la santé et l'IA visuelle dans le commerce de détail en visitant nos pages de solutions.






