コンピュータビジョンモデルが本番環境で失敗する5つの理由
データミスマッチから遅延まで、コンピュータビジョンモデルが本番環境で失敗する理由を学び、現実世界のビジョンAIシステムでモデルのパフォーマンスを向上させる方法を探ります。

コンピュータビジョンは、現在多くの産業で採用されている主要な人工知能技術であり、機械が視覚データを解釈・分析してさまざまなタスクを実行することを可能にします。これらのシステムは、医療用画像やロボット工学から製造業、小売業の自動化に至るまで、多くの実世界のアプリケーションを支えています。
しかし、コンピュータビジョンシステムを構築するのは必ずしも単純ではありません。通常、物体検出やトラッキングなどのタスクをサポートするために、画像や動画内のパターンを識別するようにトレーニングされたビジョンAIモデルを開発する必要があります。
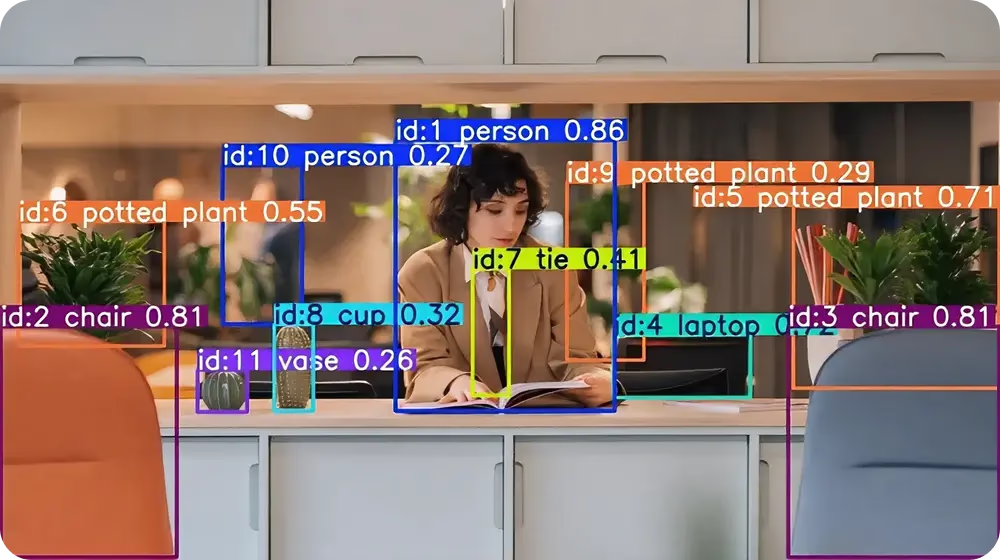
図1:物体検出とトラッキングの例(出典)
コンピュータビジョンモデルは、年々高度化しているにもかかわらず、開発時と実環境へのデプロイ後で動作が異なる場合があります。これは、管理された開発環境の外にモデルをデプロイすることで、新しい、多くの場合予想外の課題が生じるためです。
データセットの多様性の欠如、不十分なモデル監視、インフラストラクチャの制約といった要因により、同じモデルでもデプロイ後の実環境では動作が異なる可能性があります。
本記事では、コンピュータビジョンモデルが本番環境でパフォーマンスを発揮できない一般的な5つの理由を探ります。それでは始めましょう!
Link to this sectionモデルトレーニングと本番環境の間のギャップ#
モデルトレーニングは通常、制御された環境で行われます。この段階では、AI開発者は慎重に準備されたトレーニングデータセットを扱います。
これらの膨大な視覚データのコレクションには、適切に構造化されたアノテーション、つまり各画像の内容を記述するラベルが含まれています。また、トレーニングは一貫した条件下で行われるため、ビジョンAIモデルは視覚的なパターンを効率的に学習できます。
これらのパターンが正しく学習されていることを確認するために、開発中に標準的な評価メトリクスやベンチマークデータセットを使用して、モデルを体系的に評価できます。トレーニングデータセットと同様に、これらのベンチマークデータセットも慎重に準備されています。
しかし、実世界のコンピュータビジョンシステムが遭遇するデータは、トレーニングや評価で使用されたデータと大きく異なる場合があります。デプロイ後、これらのモデルが管理された条件下で動作することはほとんどありません。
照明が絶えず変化し、カメラの角度が移り変わり、背景が時間とともに変化する予測不可能な環境からの画像や動画を処理することになります。例えば、交通検出用にトレーニングされたビジョンAIモデルは、主に日中の画像でトレーニングおよび評価された場合、夜間の車両検出に苦労することがあります。

図2:強化後であっても、日中の画像でトレーニングされたモデルにとって、夜間の画像を解釈するのは困難です。(出典)
開発と実デプロイの間のこの違いが、トレーニングと本番環境のギャップです。このギャップにより、多くのモデルの失敗はデプロイ後に初めて明らかになるため、より信頼性が高く堅牢なコンピュータビジョンシステムを構築するには、早期の認識が不可欠です。
Link to this sectionコンピュータビジョンモデルが本番環境で失敗する5つの一般的な理由#
次に、コンピュータビジョンモデルが本番環境で失敗する5つの一般的な理由を詳しく見ていきましょう。
Link to this section低品質なトレーニングデータセット#
データセットは、モデルがトレーニング中に何を学習し、デプロイ後に実環境の入力に対してどのように反応するかを決定するため、コンピュータビジョンモデルのトレーニングにおいて中心的な役割を果たします。これは特に、各画像が何を表しているかを示すラベル付きの例からモデルが学習する教師あり学習において重要です。
畳み込みニューラルネットワーク(CNN)を含む多くのディープラーニングモデルは、視覚データ内のパターンを認識するためにこれらのラベル付きの例に依存しています。しかし、トレーニングデータセットが実環境の条件を反映していない場合、モデルはトレーニングデータの外側にある物体の見え方を完全には表さないパターンを学習してしまう可能性があります。
例えば、大きなひび割れ欠陥のデータセットでトレーニングされたモデルは、実際の製造現場で見られる稀な種類の微小なひび割れを検出できない場合があります。同様に、アノテーションの品質もモデルの動作に影響を与える可能性があります。一貫性のないラベルやラベル付きデータの不足している詳細は、モデルがトレーニング中に誤った情報を学習する原因となります。

図3:画像アノテーションの確認(出典)
全体として、トレーニングデータの品質と多様性は極めて重要であり、モデルが実世界のアプリケーションでどの程度機能するかを左右します。データセットが代表的で正確にラベル付けされている場合、モデルはデプロイ後により確実に機能するようになります。
Link to this section過学習と汎化#
ビジョンモデルのような機械学習モデルは、トレーニングデータセットからパターンを学習します。しかし、モデルが少数のパターンに過度に依存してしまうことがあります。
より広範な視覚的関係を学習する代わりに、トレーニングデータの限られたパターンを記憶してしまうことがあります。この動作は過学習として知られています。
過学習は通常、トレーニングデータセットが小さい場合や、十分なデータの多様性がない場合に発生します。そのような場合、モデルは見たことのある画像の認識は得意になりますが、新しいデータや馴染みのない入力の解釈に苦労することになります。
そのため、モデルはテスト入力に対してはうまく機能しても(トレーニングデータと似ているため)、デプロイ後の新しい条件下では異なる動作をする可能性があります。これが、汎化という概念が極めて重要な理由です。簡単に言えば、それはモデルがトレーニング中に学んだことを新しいシナリオにどれだけうまく適用できるかということです。
過学習を減らすために、AI愛好家は多くの場合、より多様なデータセットでモデルをトレーニングし、データ拡張を適用します。これは、トレーニング画像をわずかに変更してデータにバリエーションを持たせる手法です。これらの考慮事項がないと、システムが実環境で稼働し始めると同時に、モデルのパフォーマンスが急速に低下する可能性があります。
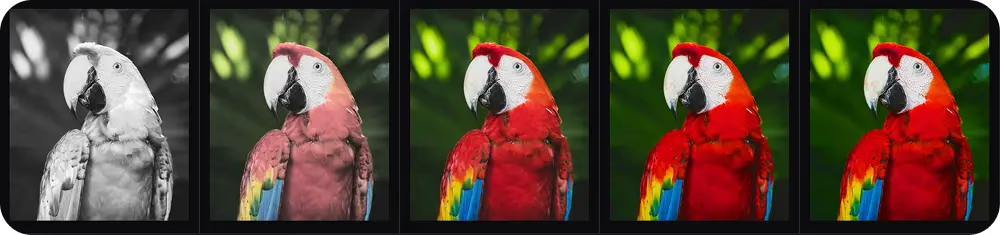
図4:データ拡張は、データセット内の同じ画像のバリエーションを作成するのに役立ちます。(出典)
Link to this section実環境における隠れたエッジケース#
コンピュータビジョンモデルが新しいデータに対してうまく汎化できる場合でも、実環境では予期しないエッジケースが発生する可能性があります。これらは、モデルがトレーニング中に学習する典型的なパターンとは異なる珍しい状況です。
これらのシナリオの多くは、めったに発生しない、再現が困難である、あるいはトレーニングデータとして収集するのにコストがかかるため、開発中に捉えるのが困難です。例えば、物体が珍しい形で見えたり、予測不可能に動いたり、他の物体の後ろに部分的に隠れたりすることがあります。
照明、カメラの角度、背景条件の変化も、認識をより困難にする状況を作り出す可能性があります。これらのエッジケースは、システムが実環境にデプロイされた後に初めて目立つようになることがよくあります。
ロボット工学や製造自動化などでは、アイテムが予期しない場所に配置されたり、位置がずれたりして、モデルが処理するように設計されていない状況が発生することがあります。最終的に、テスト中に信頼性が高いと思われた予測が、システムが実環境で稼働すると一貫性が低下する可能性があります。
Link to this sectionデプロイ後の監視とデバッグの欠如#
ビジョンAIモデルを開発することに加えて、そのパフォーマンスを監視および向上させることが不可欠です。しかし、システムが稼働し始めると、時間の経過とともにパフォーマンスを追跡するよりも、単に稼働状態を維持することに重点が置かれることがよくあります。その結果、モデルの動作の変化が見過ごされる可能性があります。
同時に、受信データ、カメラ設定、動作環境の変化などの要因が、モデルの物体検出や分類の正確さに徐々に影響を与える可能性があります。これらの変化は必ずしも明白ではなく、日常の運用中には気づかれないことがあります。
モデルの出力とシステム全体の動作を監視することは、チームがこれらの問題を早期に特定するのに役立ちます。定期的なチェック、検証ルーチン、デバッグワークフローにより、チームは異常な結果を調査し、何が原因であるかを理解できます。
製造業などの分野では、カメラ設定の変更後に、モデルが組立ライン上の物体を誤認するようになる場合があります。デプロイされたビジョンAIシステムがどのように動作するかを追跡することで、これらの変化に対応し、実環境で安定したパフォーマンスを維持することが容易になります。
Link to this sectionインフラストラクチャの制約とレイテンシ#
多くのコンピュータビジョンシステムはリアルタイムで動作する必要があり、これがハードウェア、ネットワーク、処理パイプラインに大きな負荷をかける可能性があります。リソースが限られている場合、計算の遅延やネットワークレイテンシが発生し、予測の到着が遅れ、システム全体のパフォーマンスに影響を与える可能性があります。
場合によっては、高度なディープラーニングモデルもインフラストラクチャ上の課題を生じさせる可能性があります。例えば、Transformerベースのアーキテクチャは、大量の視覚データを処理し、画像内の複雑な関係を学習するように設計されていますが、多くの場合、かなりの計算リソースを必要とします。これらのモデルを実行するには、より強力で高価なハードウェアが必要になる場合があります。
適切な最適化を行わないと、テスト中に高速で動作するモデルであっても、デプロイ後に速度が低下したり、一貫性のない動作をしたりする可能性があります。これに対処するために、チームはパイプラインの最適化、可能な限りのモデルの複雑さの軽減、精度と速度のバランス調整を頻繁に行います。
これには、大きなモデルをより軽量なバージョンに圧縮すること、より効率的なアーキテクチャを使用すること、または利用可能なハードウェアでシステムがスムーズに動作するように画像を低解像度で処理することが含まれます。多くの場合、チームはUltralytics YOLO26のような軽量で高速なモデルを選択して、デプロイの制約を満たす手助けとしています。
Link to this sectionコンピュータビジョンモデルの失敗を防ぐためのベストプラクティス#
コンピュータビジョンモデルを本番環境にデプロイする際の失敗を減らすのに役立ついくつかのベストプラクティスを以下に示します。
- 段階的なデプロイ戦略を使用する: チームがその動作を観察し、必要に応じて調整できるように、モデルを段階的に本番環境に導入します。
- フィードバックループを取り入れる: 新しい画像を収集し、誤った予測をレビューして、更新されたデータセットでモデルを再トレーニングし、時間の経過とともにパフォーマンスを向上させます。
- モデルの制限事項を文書化する: チームがデプロイ中に潜在的な問題を予測できるように、モデルが苦戦する可能性のある状況を明確に記録します。
- 実世界の変動を設計に組み込む: 照明、カメラの角度、物体の配置、背景条件の変化を事前に計画することで、さまざまな動作シナリオにおいてモデルを安定させることができます。
Link to this section重要なポイント#
コンピュータビジョンモデルがアルゴリズム自体の弱さによって失敗することはめったにありません。多くの場合、真の課題は、これらのシステムが動作する環境にあります。トレーニング中に優れたパフォーマンスを発揮するモデルでも、その動作に影響を与える可能性のある予測不可能な実世界の条件に遭遇することがあります。
そのため、信頼性の高いビジョンAIシステムを構築するには、単にモデルをトレーニングするだけでは不十分です。それには、データセットを慎重に準備し、デプロイ後のモデルのパフォーマンスを監視し、実世界の条件に合わせてシステムを継続的に適応させることも必要です。
ビジョンAIについてさらに詳しく学びたいですか?私たちのコミュニティに参加して、自動車業界におけるAIや物流におけるコンピュータビジョンといったアプリケーションについて読んでみてください。コンピュータビジョンプロジェクトを始めるには、私たちのライセンスオプションをチェックしてください。詳細については、私たちのGitHubリポジトリにアクセスしてください。






