コンピュータビジョンにおける過学習とは何か、どうすれば防げるのか?
コンピュータビジョンにおける過学習(オーバーフィッティング)とは何か、データオーグメンテーション、正則化、事前学習済みモデルを使用してそれを防ぐ方法を学びます。
コンピュータビジョンモデルは、パターンを認識し、物体を検出し、画像を分析するように設計されています。しかし、その性能は未知のデータに対してどれだけうまく汎化できるかに依存します。汎化とは、モデルが学習に使用したデータだけでなく、新しい画像に対しても適切に機能する能力のことです。モデルの学習において一般的な問題が過学習です。これは、モデルが有意義なパターンを特定する代わりに、不要なノイズを含め、学習データから過剰に学習してしまう現象を指します。
このような状況では、モデルは学習データに対しては高い性能を発揮しますが、新しい画像に対しては苦戦します。例えば、高解像度で照明条件の良い画像のみで学習した物体検出モデルは、現実世界の環境において、ぼやけていたり影のある画像を入力されると失敗する可能性があります。過学習はモデルの適応性を制限し、自動運転、医療用画像診断、セキュリティシステムといった現実世界のアプリケーションにおける活用を阻害します。
本記事では、過学習とは何か、なぜ発生するのか、そしてそれをどのように防ぐのかを探ります。また、Ultralytics YOLO11のようなコンピュータビジョンモデルが、どのように過学習を抑制し、汎化性能を向上させるのかについても見ていきます。
Link to this section過学習とは何か?#
過学習は、モデルが新しい入力に対して広範に適用できるパターンを学習する代わりに、学習データを記憶してしまった場合に発生します。モデルが学習データに過度に集中してしまうため、以前に見たことのない新しい画像や状況に対して苦戦するようになります。
コンピュータビジョンにおいて、過学習は様々なタスクに影響を及ぼします。明るく鮮明な画像のみで学習した分類モデルは、低照度環境では苦戦する可能性があります。完璧な画像で学習した物体検出モデルは、混雑したシーンや複雑なシーンでは失敗するかもしれません。同様に、インスタンスセグメンテーションモデルも、制御された設定ではうまく機能しても、影や重なった物体に対して問題を抱える可能性があります。
これは、モデルが制御された学習条件を超えて汎化できなければならない現実世界のAIアプリケーションにおいて課題となります。例えば、自動運転車は、異なる照明条件、天候、環境下で歩行者を検出できなければなりません。学習セットに対して過学習しているモデルでは、そのような予測不可能なシナリオにおいて確実な性能を発揮できません。
Link to this sectionいつ、なぜ過学習が発生するのか?#
過学習は通常、データセットの不均衡、過度なモデルの複雑性、そして過学習(訓練しすぎ)が原因で発生します。主な原因は以下の通りです。
- 限られた学習データ: データセットが小さいと、モデルはパターンを汎化するのではなく記憶してしまいます。鳥の画像50枚のみで学習したモデルは、そのデータセットに含まれない鳥の種を検出するのに苦労する可能性があります。
- パラメータが多すぎる複雑なモデル: 深いレイヤーとニューロンを持つディープネットワークは、本質的な特徴に注目するよりも、細かい詳細を記憶する傾向があります。
- データ拡張の欠如: クロップ、反転、回転といった変換を行わない場合、モデルは学習データそのものの画像からしか学習できない可能性があります。
- 過度なトレーニング: エポックと呼ばれる学習データを通る回数が多すぎると、一般的なパターンを学ぶ代わりに詳細を記憶してしまい、適応性が低下します。
- 不整合またはノイズの多いラベル: 不正確にラベル付けされたデータは、モデルに間違ったパターンを学習させます。これは手動でラベル付けされたデータセットでよく見られます。
モデルの複雑性、データセットの品質、そして学習テクニックに対してバランスの取れたアプローチをとることで、より良い汎化が確実になります。
Link to this section過学習 vs. 未学習(アンダーフィッティング)#
過学習と未学習は、ディープラーニングにおける完全に対極的な問題です。
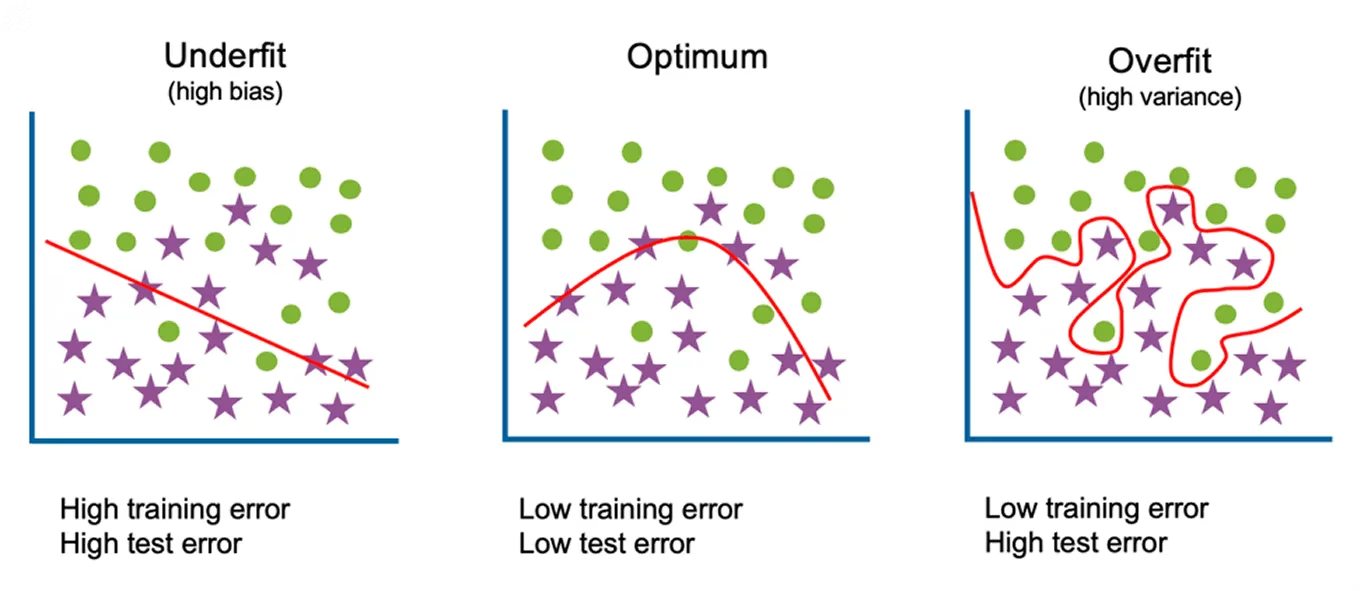
図1. コンピュータビジョンモデルにおける未学習、最適学習、および過学習の比較。
過学習は、モデルが複雑すぎて、学習データに過剰に集中してしまうと発生します。一般的なパターンを学ぶ代わりに、背景ノイズのような無関係なものも含め、小さな詳細を記憶してしまいます。これにより、モデルは学習データに対してはうまく機能しますが、新しい画像に対しては苦戦します。つまり、異なる状況に適用されるパターンをどのように認識するかを真に学習できていないことを意味します。
未学習は、モデルが単純すぎて、データ内の重要なパターンを見逃してしまう場合に発生します。これは、モデルのレイヤーが少なすぎる、学習時間が足りない、またはデータが限られている場合に起こり得ます。その結果、重要なパターンの認識に失敗し、不正確な予測を行います。これは、モデルがタスクを理解するために十分な学習を行っていないため、学習データとテストデータの両方で性能が低くなる原因となります。
よく訓練されたモデルは、複雑性と汎化のバランスを取ります。関連するパターンを学習するのに十分な複雑さを持ちつつも、根底にある関係性を認識する代わりにデータを記憶してしまうほど複雑ではない状態であるべきです。
Link to this section過学習を特定する方法#
モデルが過学習していることを示す兆候をいくつか挙げます。
- 学習精度が検証精度よりも著しく高い場合、そのモデルは過学習している可能性が高いです。
- 学習損失と検証損失の間のギャップが拡大していることも、強力な指標の一つです。
- モデルが間違った回答に対して過度な自信を持っている場合、それはパターンを理解する代わりに詳細を記憶してしまったことを示しています。
モデルがうまく汎化することを保証するためには、現実世界の条件を反映した多様なデータセットでテストする必要があります。
Link to this sectionコンピュータビジョンで過学習を防ぐ方法#
過学習は避けられないものではなく、防ぐことができます。適切なテクニックを用いることで、コンピュータビジョンモデルは学習データを記憶するのではなく、一般的なパターンを学習できるようになり、現実世界のアプリケーションにおいてより信頼性が高まります。
コンピュータビジョンにおける過学習を防ぐための5つの重要な戦略を以下に挙げます。
Link to this section拡張と合成データによるデータの多様性の向上#
モデルが新しいデータに対してうまく機能するように助ける最善の方法は、データ拡張と合成データを使用してデータセットを拡大することです。合成データは、現実世界の画像から収集されたものではなく、コンピュータ生成されたものです。これは、現実のデータが十分にない場合にギャップを埋めるのに役立ちます。
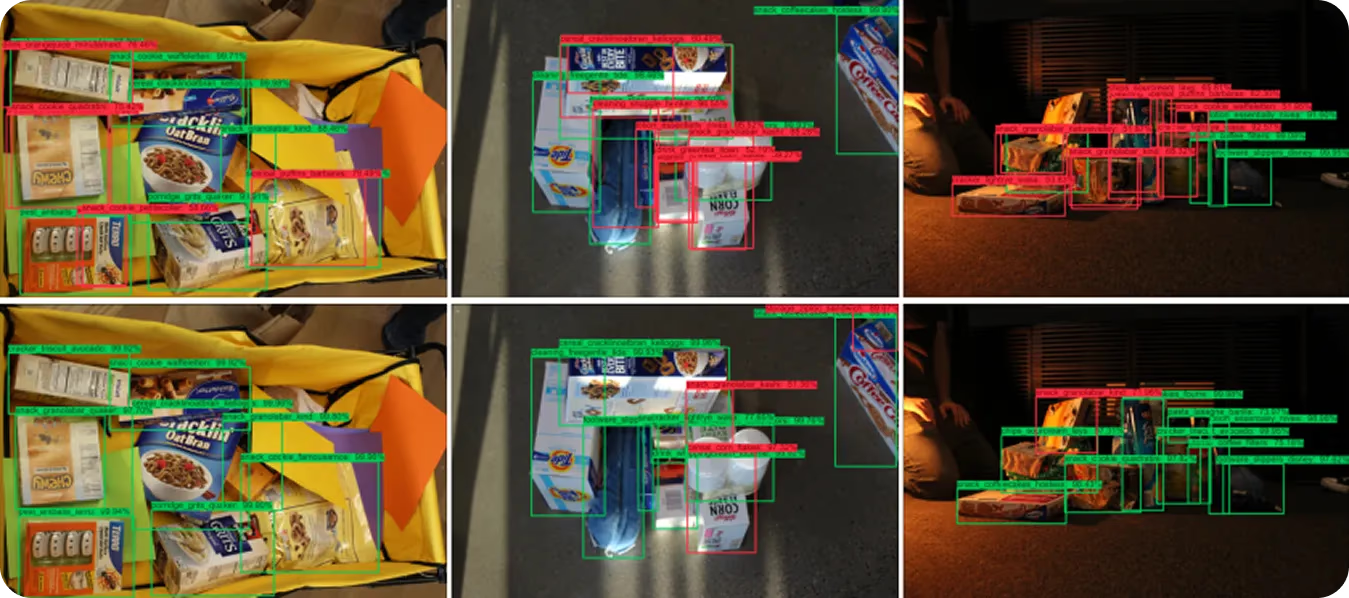
図2. 現実世界のデータと合成データの組み合わせは、過学習を抑制し、物体検出精度を向上させます。
データ拡張は、既存の画像を反転、回転、クロップ、または輝度調整することでわずかに変化させるため、モデルは詳細を記憶するだけでなく、異なる状況下で物体を認識する方法を学習します。
合成データは、現実の画像を入手しにくい場合に有用です。例えば、自動運転車モデルは、コンピュータ生成された道路シーンで学習し、異なる天候や照明条件下での物体検出方法を学ぶことができます。これにより、何千もの現実の画像がなくても、モデルはより柔軟で信頼性の高いものになります。
Link to this sectionモデルの複雑性とアーキテクチャの最適化#
単一レイヤーではなくデータを処理する複数のレイヤーを持つ機械学習モデルの一種であるディープニューラルネットワークが、常に優れているわけではありません。モデルのレイヤーやパラメータが多すぎると、より広いパターンを認識する代わりに学習データを記憶してしまいます。不要な複雑さを減らすことは、過学習を防ぐのに役立ちます。
これを達成する一つのアプローチとして、冗長なニューロンや接続を削除し、モデルをより簡潔で効率的にするプルーニングがあります。
もう一つの方法は、レイヤー数やニューロン数を減らしてアーキテクチャを簡素化することです。YOLO11のような事前学習済みモデルは、少ないパラメータでタスク全体をうまく汎化するように設計されており、一から深いモデルを学習させるよりも過学習しにくくなっています。
モデルの深さと効率の適切なバランスを見つけることで、学習データを記憶するだけでなく、有用なパターンを学習できるようになります。
Link to this section正則化テクニックの適用#
正則化テクニックは、モデルが学習データ内の特定の特徴に過度に依存するのを防ぎます。一般的に使用されるテクニックをいくつか挙げます。
- ドロップアウトは、学習中にモデルのランダムな部分を無効化することで、少数の特徴に頼りすぎるのではなく、異なるパターンを認識するように学習させます。
- **重み減衰(L2正則化)**は、極端な重み値を抑止し、モデルの複雑性を制御下に保ちます。
- バッチ正規化は、データセットの変動に対してモデルの感度を下げ、学習を安定させるのに役立ちます。
これらのテクニックはモデルの柔軟性と適応性を維持し、精度を損なうことなく過学習のリスクを軽減します。
Link to this section検証と早期終了による学習の監視#
過学習を防ぐには、モデルがどのように学習しているかを追跡し、新しいデータに対してうまく汎化することを確認することが重要です。これを支援するテクニックをいくつか挙げます。
- 早期終了: モデルの改善が止まった時点で自動的に学習を終了させ、不要な詳細を学習し続けないようにします。
- クロスバリデーション: データをいくつかの部分に分割し、それぞれでモデルを学習させます。これは、特定の画像を記憶するのではなく、パターンを学習するのに役立ちます。
これらのテクニックは、モデルが学習データだけに集中しすぎることなく、十分な正確さを得るためにバランスを保つのに役立ちます。
Link to this section事前学習済みモデルの使用とデータセットのラベル付けの改善#
一から学習する代わりに、YOLO11のような事前学習済みモデルを使用することで過学習を減らすことができます。YOLO11は大規模なデータセットで学習されているため、様々な条件間でうまく汎化できます。

図3. 事前学習済みコンピュータビジョンモデルは、精度を高め、過学習を防ぎます。
事前学習済みモデルをファインチューニングすることで、学習データを記憶するだけでなく、すでに持っている知識を保持しながら新しいタスクを学ぶことができます。
さらに、高品質なデータセットのラベル付けを確実にすることが不可欠です。ラベル付けのミスや不均衡なデータは、モデルが誤ったパターンを学習するように誤解させる可能性があります。データセットのクリーニング、ラベル付けミスの修正、およびクラスのバランスをとることは、精度を向上させ、過学習のリスクを減らします。もう一つの効果的なアプローチは敵対的学習です。これは、モデルの限界をテストするために設計された、わずかに変更された、またはより困難な例をモデルにさらす方法です。
Link to this section重要なポイント#
過学習はコンピュータビジョンにおける一般的な問題です。モデルは学習データに対してはうまく機能しても、現実世界の画像では苦戦するかもしれません。これを避けるためには、データ拡張、正則化、そしてYOLO11のような事前学習済みモデルの使用といったテクニックが、精度と適応性の向上に役立ちます。
これらのメソッドを適用することで、AIモデルは信頼性を維持し、異なる環境下でも高い性能を発揮できるようになります。ディープラーニングが進化するにつれ、モデルが適切に汎化できるようにすることは、現実世界でのAIの成功の鍵となるでしょう。
成長を続ける私たちのコミュニティに参加しましょう!AIについてより深く学ぶには、GitHubリポジトリを探索してください。独自のコンピュータビジョンプロジェクトを始める準備はできましたか?ライセンスオプションをご確認ください。ソリューションページを訪れて、自動運転におけるビジョンAIやヘルスケアにおけるAIについて発見してください!






