エッジAIのためにUltralytics YOLOモデルをAxelera AIハードウェアで活用
効率的で高性能なエッジAIを実現するために、Axelera AIと協力したUltralytics Pythonパッケージでサポートされる新しいエクスポート統合についてご紹介します。

AIの採用が広がるにつれ、Ultralyticsではコンピュータビジョンモデルをエッジデバイス上で直接実行する動きが強まっています。最近の技術カンファレンスでの対面やオンラインの場を通じてコンピュータビジョンコミュニティと対話する中で、私たちのチームは、データが生成される場所の近くでビジョンAIを展開することへの関心の高まりを実感しています。
スマートリテール環境や産業オートメーションからロボティクスに至るまで、リアルタイムのインサイト(洞察)が不可欠となっており、クラウドだけに頼る手法ではもはや十分ではありません。
端的に言えば、エッジAIとは、データを処理のために中央サーバーへ送信するのではなく、デバイス上でローカルにAIモデルを実行することです。これにより、遅延の削減、信頼性の向上、そして現実世界でのイベントに対するリアルタイムな対応が可能になります。
しかし、これらの環境で高性能モデルを展開することには特有の課題があります。限られた計算リソースと電力の制約により、モデルは効率的であると同時に、動作させるハードウェアに合わせて最適化されていなければなりません。
Ultralytics YOLO26のようなUltralytics YOLOモデルは、リアルタイムのコンピュータビジョン向けに設計されていますが、エッジでその潜在能力を最大限に引き出すには、ソフトウェアとハードウェアの適切な組み合わせが不可欠です。だからこそ、私たちはAxelera AIとのコラボレーションを発表できることを嬉しく思います。
私たちはAxelera AIと提携し、最新のエクスポート統合機能を導入しました。これにより、Ultralytics YOLOモデルをMetis® AI Processing Units (AIPUs)上で効率的かつ高性能に展開することが可能になります。
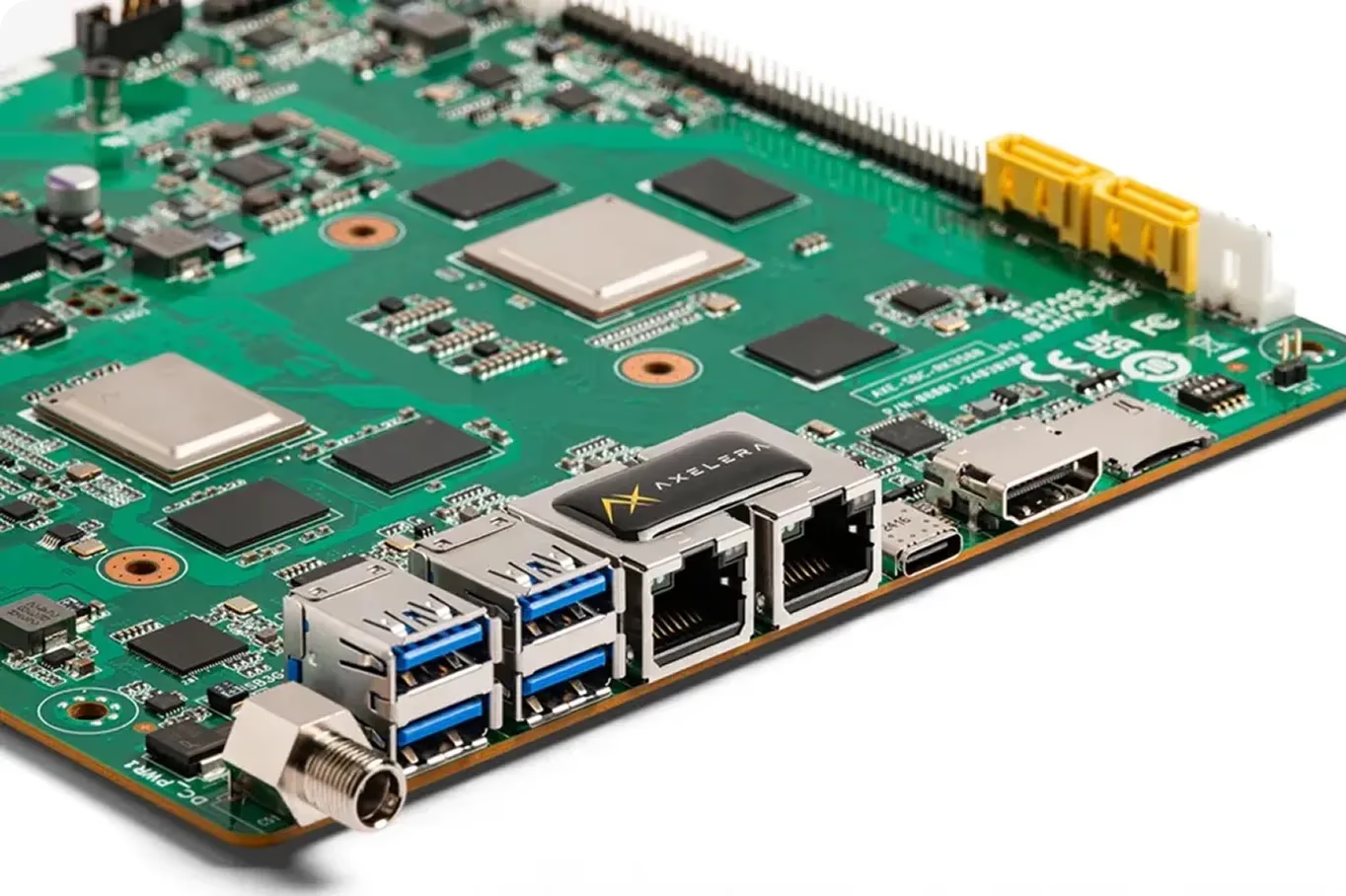
図1. Metis AI Processing Unitの様子 (ソース)
この記事では、Ultralytics YOLOモデルをMetis展開用に簡単にコンパイルする方法を探ります。それでは始めましょう!
Link to this sectionエッジAIはコンピュータビジョンの未来です#
コンピュータビジョンのアプリケーションが進化し続ける中、より高速で効率的な処理へのニーズがますます重要になっています。従来のクラウドベースのアプローチでは遅延が発生したり、安定した接続に依存したりすることがあり、多くのインテリジェントなビジョン活用事例においてリアルタイムの要求を満たせない可能性があります。
エッジAIは、モデルをローカルデバイス上で直接実行し、発生源の近くでデータを処理可能にすることで、これらの課題に対処します。例えば、捜索救助活動で使用されるビジョン搭載ドローンを考えてみてください。
これらのシステムは、人、障害物、または危険を検出するためにビデオフィードをリアルタイムで分析する必要があり、多くの場合、インターネット接続が制限されているか、まったくない遠隔地で動作します。コンピュータビジョンモデルをドローン上で直接実行することで、エッジAIはクラウドインフラに頼ることなく、より迅速な意思決定と信頼性の高いパフォーマンスを実現します。
この転換は、業界全体で新たな可能性を切り開いています。小売業におけるリアルタイムの物体検出、製造業における自動品質検査、ロボティクスにおける認識など、あらゆるアプリケーションが、応答時間の短縮と信頼性の向上から恩恵を受けています。
エッジAIは、現実世界においてスケーラブルかつ応答性の高いコンピュータビジョンシステムを展開するための重要な手段となりつつあります。
Link to this sectionAxelera AIのMetis AI Processing Unitsを探る#
新しいエクスポート統合について詳しく説明する前に、一歩立ち止まってAxelera AIのMetis AI Processing Unitsと、効率的なエッジAIを実現する上でのその役割について学びましょう。
Axelera AIは、エッジでのAI推論を加速するために特別に設計された専用ハードウェアを開発しています。その核心となるのが、エッジデバイス上でニューラルネットワークを効率的に実行するために構築された特殊プロセッサ、Metis AIPU(AI Processing Unit)です。
汎用的な中央処理装置(CPU)やグラフィックス処理装置(GPU)とは異なり、AIPUはAIワークロード特有の計算パターンを処理するように設計されています。これにより、リソースが限られがちなエッジ環境において重要な、低消費電力を維持しながら高いパフォーマンスを実現できます。
Axelera AIのアプローチが特に革新的であるのは、そのフルスタック設計にあります。Metisは、エッジコンピューティングが求める高いパフォーマンスとエネルギー効率を実現するために、デジタル・インメモリ・コンピューティング(D-IMC)とRISC-Vで構築されています。Metisの4つのコアは個別にプログラム可能であり、チップごとに4つのモデルを並列で実行できます。ハードウェアに加えて、Voyager SDKにはコンパイラとランタイムが含まれており、これらが連携して展開用のモデルを最適化します。
これにより、開発者はトレーニング済みモデルから本番環境の推論へより効率的に移行できます。具体的には、Metis AIPUを使用することで、エンタープライズ、小売、ヘルスケア、製造環境から、農業、産業機器、衛星に至るまで、エッジデバイス上でUltralytics YOLOモデルのような高度なコンピュータビジョンモデルを直接実行することが可能になります。
Link to this sectionMetis展開に向けたUltralytics YOLOモデルのエクスポート#
Ultralytics Pythonパッケージは、幅広いコンピュータビジョンタスクにおいてYOLOモデルのトレーニング、評価、および展開を行うための統合インターフェースを提供します。YOLOモデルは通常、PyTorchを使用して開発・トレーニングされており、これは実験やモデル開発に適しています。
しかし、これらのモデルを専門的なエッジハードウェアに展開する場合、ターゲットデバイスに最適化された形式へ変換する必要があります。ここで、Ultralytics Pythonパッケージがサポートするエクスポート統合機能が役立ちます。
Ultralyticsは、展開ターゲットに応じてYOLOモデルをONNX、TensorRT、およびその他のハードウェア固有のバックエンドなどの異なる形式へ変換できる多様なエクスポートオプションを提供しています。これらの統合機能は、必要な最適化と変換手順を処理することで、実社会のアプリケーション向けにモデルを準備するプロセスを簡素化します。
これに基づき、UltralyticsはAxelera AIとのエクスポート統合を更新し、YOLOモデルをMetis AIPUへ展開するためにエクスポートできるようにしました。
エクスポート中、モデルはAxeleraハードウェア専用に設計された最適化表現へとコンパイルおよび量子化されます。このプロセスにより、展開と推論に必要なメタデータとともに、".axm"形式のコンパイル済みモデルが生成されます。
図2. Ultralytics YOLOモデルはMetis AIPU上で実行可能。 (ソース)
この統合により、Ultralytics YOLOv8、Ultralytics YOLO11、およびUltralytics YOLO26モデル全体で、物体検出、姿勢推定、インスタンスセグメンテーション、指向性バウンディングボックス(OBB)検出、画像分類を含む幅広いコンピュータビジョンタスクがサポートされます。ほとんどのタスクはエクスポートワークフローを通じて直接サポートされていますが、YOLO26のセグメンテーションについては、Voyager SDKを使用したmodel zoo経由で利用可能です。
この拡張されたサポートにより、開発者はリアルタイムの物体検出からシーン理解、動きの追跡、複雑な視覚データの分析まで、アプリケーションに応じて異なる種類のビジョンモデルを柔軟に展開できるようになります。
エクスポート後は、推論時にPyTorchに依存することなくモデルを展開・実行できます。代わりに、Voyager SDKランタイムを使用して実行され、このランタイムはビデオ処理、リアルタイム検出、追跡といったタスクのエンドツーエンドパイプラインをエッジデバイス上で直接構築することをサポートしています。
Link to this sectionUltralytics YOLOモデルのエクスポートを始める#
新しいエクスポート統合についての理解が深まったところで、Ultralytics YOLOモデルをこのカスタム形式へエクスポートし、エッジのMetisハードウェア上で実行する手順を見ていきましょう。
Link to this sectionステップ1:Ultralytics Pythonパッケージのインストール#
開始するには、まずUltralytics Pythonパッケージをインストールする必要があります。これは、YOLOモデルのトレーニング、評価、エクスポートのためのシンプルで一貫したインターフェースを提供します。
ターミナルまたはコマンドプロンプトで以下のコマンドを実行して、pipを使用してインストールできます。
pip install ultralyticsインストールやエクスポート中に問題が発生した場合は、公式のUltralyticsドキュメントおよび共通の問題ガイドがトラブルシューティングに役立つ優れたリソースです。
Link to this sectionステップ2: AxeleraドライバとVoyager SDKのインストール#
Axeleraハードウェアへモデルをエクスポートして実行するには、AxeleraドライバとVoyager SDKもインストールする必要があります。このステップにより、Metis AIPUとの通信が可能になり、必要なランタイムおよびコンパイラツールが提供されます。
以下の手順は、Axelera AI MetisハードウェアにアクセスできるLinux環境で実行する必要があります。システムでターミナルを開くか、互換性のあるローカルセットアップでJupyter Notebookを実行している場合はノートブックセルを使用して、以下のコマンドを実行してください。
まず、次のようにAxeleraリポジトリキーを追加します。
sudo sh -c "curl -fsSL https://software.axelera.ai/artifactory/api/security/keypair/axelera/public | gpg --dearmor -o /etc/apt/keyrings/axelera.gpg"次に、以下に示すように、システムへAxeleraリポジトリを追加します。
sudo sh -c "echo 'deb [signed-by=/etc/apt/keyrings/axelera.gpg] https://software.axelera.ai/artifactory/axelera-apt-source/ ubuntu22 main' > /etc/apt/sources.list.d/axelera.list"その後、次のようにVoyager SDKをインストールし、Metisドライバをロードします。
sudo apt update
sudo apt install -y metis-dkms=1.4.16
sudo modprobe metisこれらの手順が完了すると、システムでUltralytics YOLOモデルをAxelera AI Metisデバイスへエクスポートして実行する準備が整います。
Link to this sectionステップ3: Ultralytics YOLOモデルのエクスポート#
Ultralyticsパッケージがインストールされたら、YOLOモデルをロードし、Metis用にコンパイルされたパッケージとしてエクスポートできます。このプロセスにより、モデルはAxelera AI Metisハードウェアへの展開に最適化された形式へ変換されます。
以下の例では、学習済みのYOLO26 nanoモデルを使用し、Metis用にエクスポートします。エクスポートされたモデルは"/yolo26n_axelera_model"というディレクトリに保存されます。
from ultralytics import YOLO
model = YOLO("yolo26n.pt")
model.export(format="axelera")Link to this sectionステップ4: エクスポート済みモデルでの推論実行#
モデルのエクスポート後、それをロードして未確認の画像やビデオストリームで推論を実行できます。これにより、Axelera AI Metisデバイス上でリアルタイムのコンピュータビジョンタスクが直接可能になります。
例えば、以下のコードスニペットは、エクスポートされたモデルをロードし、公開されているURLに対して推論を実行する方法を示しています。
axelera_model = YOLO("yolo26n_axelera_model")
results = axelera_model("https://ultralytics.com/images/bus.jpg", save=True)この場合、モデルは入力画像を分析して物体を検出し、結果を"runs/detect/predict"ディレクトリに保存します。
Link to this sectionUltralytics YOLOとAxelera AIハードウェアが影響を与えられる場所#
次に、現実世界のシナリオにおいてUltralytics YOLOモデルをAxelera AIハードウェアに展開できる、一般的なエッジAIアプリケーションについて説明します。
Axelera AIのMetis AIPUは、組み込みシステムや産業用PCからロボティクスやエッジサーバーまで、幅広い展開環境向けに設計されています。高性能でエネルギー効率に優れた推論により、業界全体でビジョンAIアプリケーションをデバイス上で直接実行可能にします。また、Voyager SDKにはMLエンジニアやAPPエンジニアがモデルをエッジ向けに製品化するためのパイプラインビルダーが含まれています。
Link to this section小売店におけるエッジ動作のスマートビジョンシステム#
小売環境において、顧客行動をリアルタイムで理解することは大きな違いを生む可能性があります。
Axelera AIハードウェア上で動作するUltralytics YOLOモデルを使用することで、店舗は来店客数、人流、店舗内での動きのパターンをリアルタイムで監視・分析できます。すべてがデバイス上で動作するため、クラウド接続に依存せず瞬時にインサイトを生成でき、チームはデータプライバシーを維持しながらより迅速に対応できるようになります。
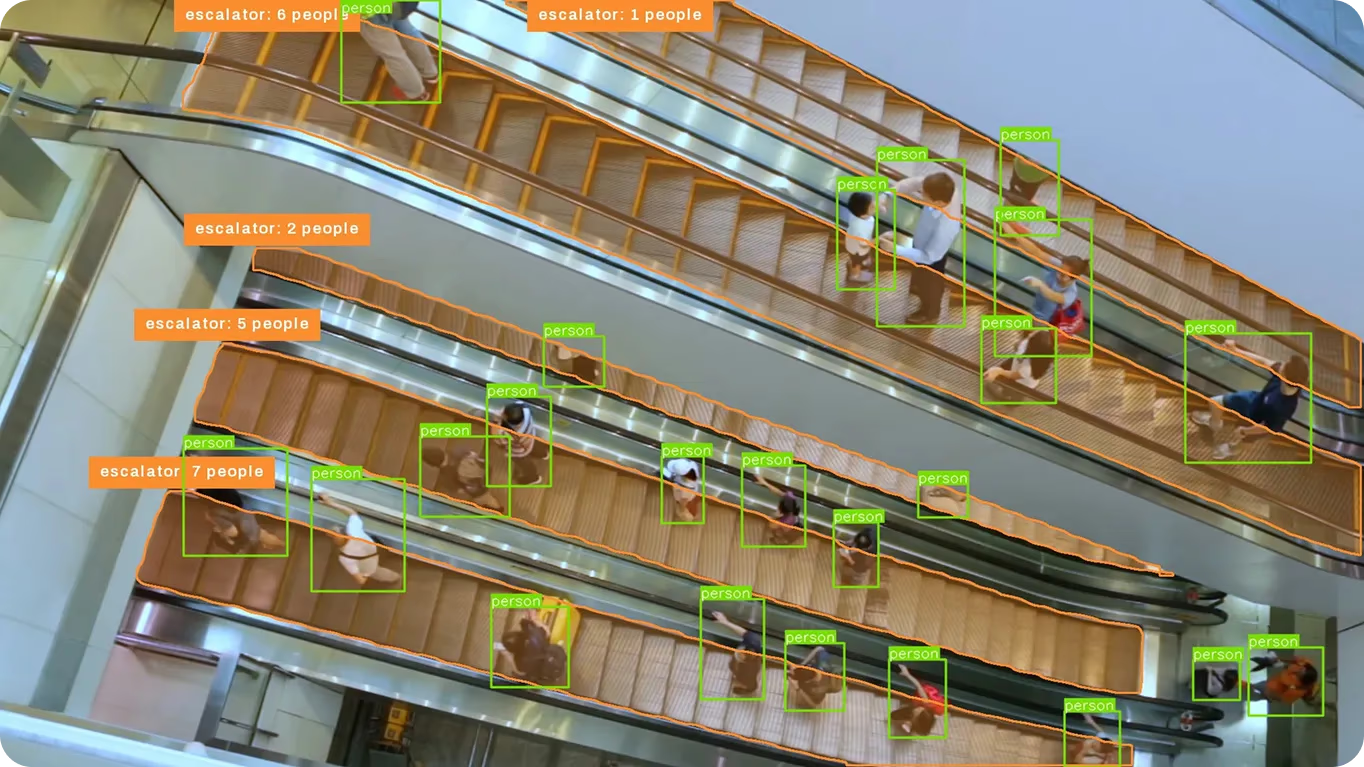
図3. YOLO26を使用したショッピングモールでの人物検出とカウント
Link to this sectionユーティリティおよびインフラ点検のためのエッジAI活用#
送電線などの大規模インフラの保守は複雑で、多くのリソースを必要とします。これらのネットワークは広大な距離に及ぶことが多く、点検には時間とコストがかかり、危険を伴う可能性もあります。障害や劣化の兆候が未発見のままになると、停電、機器の損傷、または安全上のリスクへと発展する可能性があります。
点検効率を向上させるためにドローンがますます活用されています。ドローンは長距離を移動し、到達困難なエリアにアクセスし、重要な資産の高解像度画像を撮影できます。
ドローンとエッジAIを組み合わせることで、これらのワークフローはさらに強化されます。Axelera AIハードウェア上で動作するUltralytics YOLOモデルは、点検中のリアルタイム分析を可能にし、現場での障害箇所の特定、コンポーネントの分類、異常の検出をサポートします。これにより、手動レビューの必要性が減り、より迅速で信頼性の高いインフラ監視が可能になります。
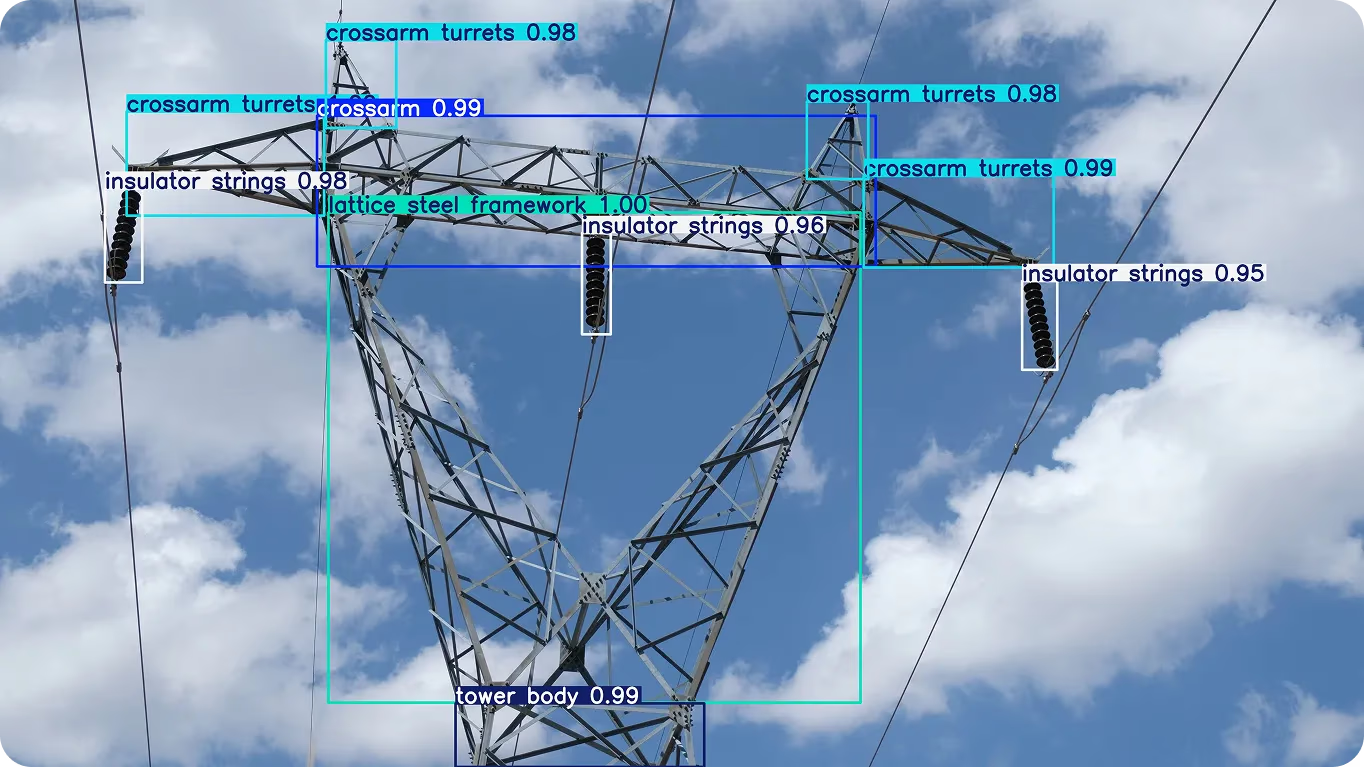
図4. YOLO26で送電線の各部品を検出
Link to this sectionリアルタイムのビジョンAIインサイトでロボティクスを強化#
ロボティクスにおいて、速度と応答性は極めて重要です。倉庫内を移動する場合でも、動的な産業環境で作業する場合でも、ロボットは周囲の状況を即座に解釈する必要があります。
Axelera AIハードウェア上で動作するUltralytics YOLOモデルを使用すると、ロボットは障害物の検出から人の追跡、物体の識別まで、周囲の状況をリアルタイムで解釈できます。これにより、システムはより安全に移動し、動的な状況に適応し、常にクラウド接続に依存することなく高い自律性で動作できるようになります。
Link to this sectionMetis AIPUでUltralytics YOLOモデルを実行する主な利点#
新しい統合機能を使用してAxelera AIのMetisハードウェアへUltralytics YOLOモデルを展開する主な利点は以下の通りです。
- Ultralyticsワークフローとのシームレスな統合: Metis展開用のYOLOモデルのエクスポートはUltralytics Pythonパッケージに自然に組み込まれており、トレーニングから推論への移行を簡素化します。
- 複数のコンピュータビジョンタスクのサポート: YOLOv8、YOLO11、およびYOLO26を通じて、物体検出、姿勢推定、セグメンテーション、分類などのモデルを展開できます。
- モデルの並列実行: Metis AIPUは、ニーズに合わせて4つの別々のモデルを並列で実行可能な4つの独立したプログラム可能コアを備えて設計されています。
- エッジAIアプリケーション全体でスケーラブル: 小売分析や産業用点検から、ロボティクスやスマートインフラに至るまで、この統合機能は幅広い実世界のユースケースをサポートします。
Link to this section重要なポイント#
Ultralytics YOLOモデルとAxelera AIのMetis AIPUにより、高性能なコンピュータビジョンをエッジへより簡単に導入できます。この統合は、展開を簡素化し、専門ハードウェア向けにモデルを最適化することで、開発と現実世界のアプリケーションの間のギャップを埋めるのに役立ちます。
エッジAIが成長し続ける中で、効率的でスケーラブルな展開オプションを持つことが、応答性が高く信頼性の高いシステムを構築するための鍵となります。このコラボレーションは、高度なビジョンAIを業界全体でより利用しやすくするための一歩です。
AIについてさらに詳しく知りたいですか? GitHubリポジトリを調査し、コミュニティとつながり、ライセンスオプションをチェックして、コンピュータビジョンプロジェクトを開始しましょう。小売におけるAIやヘルスケアにおけるコンピュータビジョンのようなイノベーションがどのように未来を形作っているかをご覧ください。






