Ultralytics YOLOモデルによる車両再識別の強化
Ultralytics YOLOモデルが、正確で精度の高い検出を提供することで、車両再識別ソリューションにおいてどのような役割を果たせるかを学びます。

Formula Oneのレース観戦中、応援するチームの車を見つけるのは簡単です。フェラーリの鮮やかな赤やメルセデスのシルバーは、ラップを重ねるごとに際立っています。
しかし、これを機械に行わせるとなると、整備されたレーストラックではなく、交通量で溢れかえる都市の道路上でははるかに難しくなります。そのため、AI分野では近年、車両の再識別(vehicle re-ID)が注目を集めています。
車両の再識別とは、機械が複数のカメラ映像や重なりのないカメラ間においても、同一の車両を認識できるようにする技術です。また、一時的なオクルージョン(車両が部分的に隠れる現象)や、照明や視点の変化が発生した後でも車両を特定することを目指しています。
車両の再識別を支える中核技術はコンピュータビジョンです。コンピュータビジョンは、画像や動画などの視覚情報を理解・解釈するように機械を学習させる人工知能のサブフィールドです。この技術を用いることで、AIシステムは車両の特徴を解析し、都市監視や交通モニタリングといった用途のために、大規模なカメラネットワーク全体で確実に追跡することが可能になります。
特に、Ultralytics YOLO11や次期モデルのUltralytics YOLO26などのVision AIモデルは、物体検出や追跡といったタスクをサポートします。これらのモデルはフレーム内の車両を素早く特定し、シーン内での動きを追跡できます。これらのモデルを車両再識別ネットワークと組み合わせることで、視点や照明条件が変化しても、異なるカメラフィード間で同一車両を認識できるシステムが構築可能です。
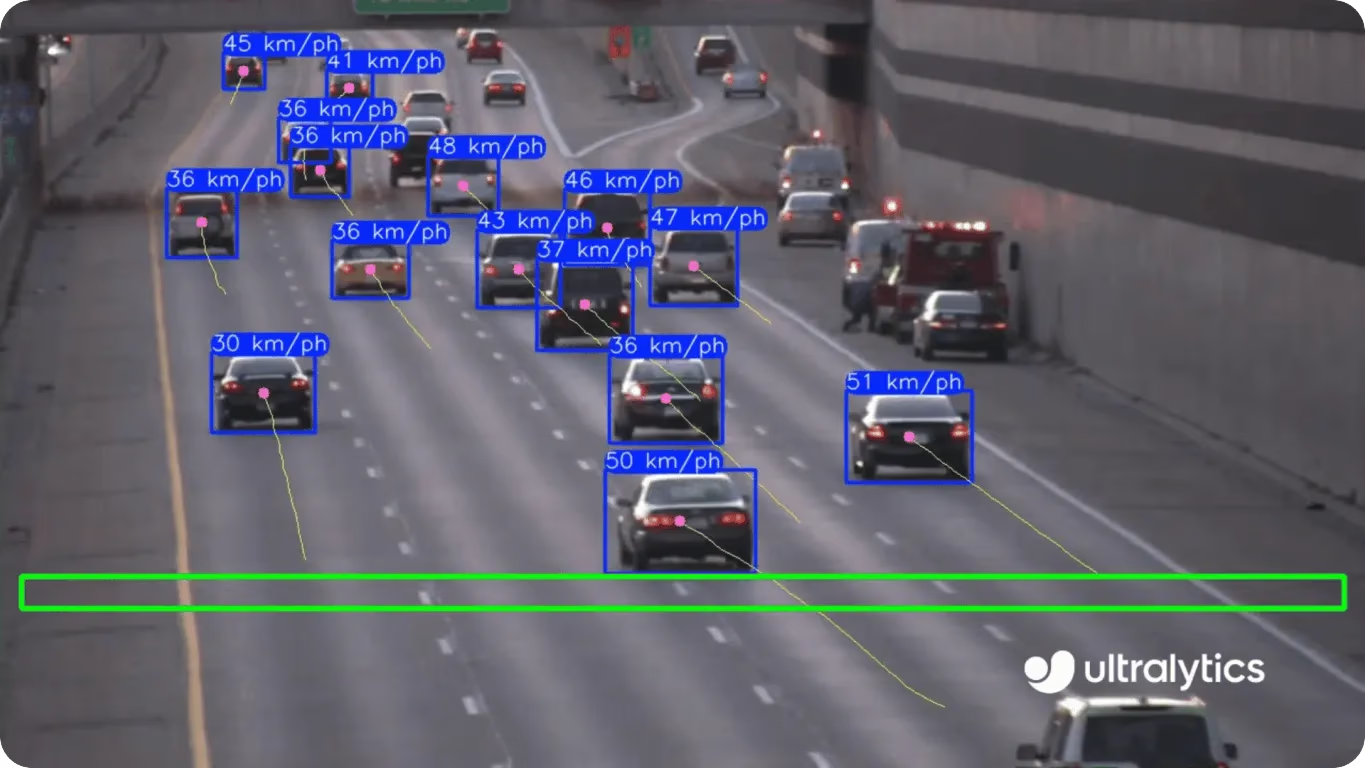
図1. YOLO11を使用した車両追跡および速度推定の例 (ソース)
この記事では、車両の再識別がどのように機能するのか、それを可能にする技術、そしてインテリジェント交通システムにおける利用例について見ていきます。それでは始めましょう!
Link to this section車両の再識別とは何か?#
車両の再識別は、コンピュータビジョンの重要な応用の一つです。これは、重なり合わない異なるカメラの映像間で同一の車両を認識し、都市を移動する際の車両のアイデンティティを保持することに重点を置いています。カメラごとに車両を捉える角度や照明条件が異なったり、部分的に遮蔽されたりするため、このタスクは非常に困難です。
青いセダンが交差点を通過し、その後別のストリートで別のカメラに捉えられるシナリオを考えてみてください。角度、照明、背景はすべて変化しており、他の車によって一時的に視界が遮られることもあります。それでも、車両の再識別システムはそれが同一の車両であると判断する必要があります。
近年のディープラーニングの進歩、特に畳み込みニューラルネットワーク(CNN)やTransformerベースのモデルの登場により、このプロセスの精度は飛躍的に向上しました。これらのモデルは有意義な視覚的パターンを抽出し、似たような外見の車両と区別しながら正しい車両を特定できます。
インテリジェント交通システムにおいて、この機能は継続的なモニタリング、経路再構築、都市全体の交通分析をサポートし、スマートシティシステムに車両の動きをより明確に把握させます。これにより、安全性と効率性の向上が図られます。
Link to this section車両の再識別の仕組みを理解する#
通常、交差点、駐車場、高速道路からの動画は、車両の再識別技術を用いて分析され、同一の車両が異なるカメラに映っているかが判定されます。この概念は、人物の再識別でシステムが複数の視点で個人を追跡するのと似ていますが、ここでは人の外見ではなく車両特有の特徴の分析に焦点を当てています。
そのプロセスにはいくつかの主要なステップが含まれており、それぞれがシステムの車両検出、視覚的特徴の抽出、そして異なる視点間での確実な照合を支援するように設計されています。
大まかに言えば、システムはまず各フレーム内で車両を検出し、色、形状、テクスチャなどの特徴を抽出して、それぞれに対して独自のデジタル表現(エンベディング)を作成します。これらのエンベディングは時間的およびカメラ間で比較され、多くの場合、物体追跡や時空間チェックによって補完され、2つの捉えられた物体が同一の車両であるかどうかが決定されます。
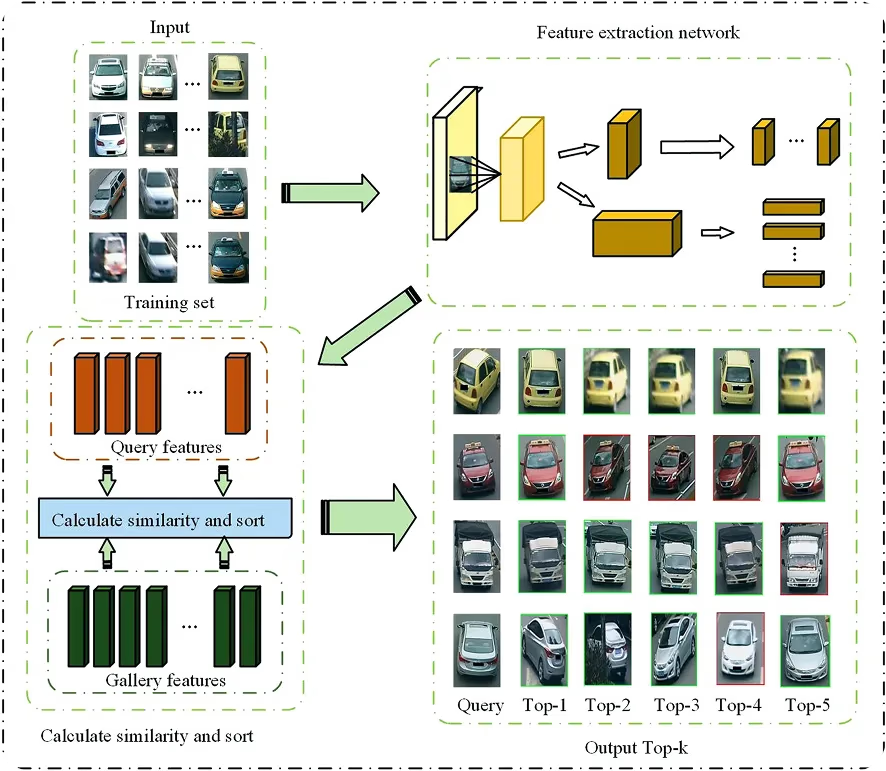
図2. 車両の再識別の仕組み (ソース)
このプロセスを詳しく見ていきましょう:
- 物体検出: システムはまずビデオフレーム内の車両を特定し位置を特定することで、どの領域を処理すべきかを把握します。このステップは通常、物体検出モデルによって処理されます。
- 特徴抽出: 検出後、専用のRe-IDまたは特徴抽出ネットワークが各車両のクロップを分析し、色、形状、テクスチャ、特徴的な部位といった視覚的な詳細情報を捉える特徴マップまたは特徴表現を生成します。
- エンベディング生成: 抽出されたこれらの特徴は、特徴エンベディングと呼ばれる数値表現に変換されます。このエンベディングは、車両が異なる角度からどのように見えるかを捉えたデジタル指紋のように機能します。照合の前に、これらのエンベディングは通常、照明、コントラスト、カメラ設定によって生じる差が同一性比較を妨げないように正規化されます。正規化により、システムはノイズではなく、同一性に関連する意味のある特徴に集中できるようになります。
- 物体追跡: 単一のカメラビュー内では、追跡アルゴリズムがフレーム間で検出結果を接続し、車両がシーン内を移動する間、一貫したIDを維持するのに役立ちます。
- カメラ間照合: 異なるカメラ間で同一の車両を照合するために、システムは(Re-IDネットワークによって生成された)エンベディングを、タイミングや位置情報とともに比較します。このステップにより、カメラ同士が重なっていない場合でも、2つの検出結果が同一の車両であるかどうかが決定されます。
Link to this sectionUltralytics YOLOモデルはどのように車両の再識別をサポートできるか#
Ultralytics YOLOモデルは、車両の再識別パイプラインにおいて重要なサポート的役割を果たします。これら自体でRe-IDを実行するわけではありませんが、正確なカメラ間照合を行うRe-IDネットワークが依存する、高速な検出や安定した追跡といった不可欠な機能を提供します。
次に、Ultralytics YOLOモデル(YOLO11など)が、車両の再識別システムをどのように強化できるかを詳しく見ていきましょう。
Link to this section正確な車両検出モジュール:Re-IDシステムの最初のステップ#
車両再識別システムの基盤は正確な物体検出です。YOLO11のようなUltralytics YOLOモデルは、部分的な遮蔽、激しい交通、変化する照明条件がある混雑したシーンでも、フレーム内の車両を迅速に検出できるため、この目的に最適な選択肢です。
また、カスタムトレーニングも可能なため、独自データセットでモデルを微調整し、タクシー、配送用バン、フリート車両などの特定の車両タイプを認識するように学習させることができます。これは、より専門的な検出が必要なソリューションにおいて特に有効です。クリーンで正確なバウンディングボックスを提供することで、Ultralytics YOLOモデルはRe-IDネットワークに高品質な入力データを与え、カメラ間での照合の信頼性を高めます。
Link to this section信頼性の高い単一カメラ追跡のサポート#
車両が検出されると、YOLO11のようなモデルは単一カメラビュー内での安定した物体追跡もサポートできます。物体追跡とは、検出された車両を連続するフレーム間で追いかけ、それが移動する間、一貫したIDを割り当てるプロセスです。
Ultralytics PythonパッケージにおけるByteTrackやBoT-SORTといった追跡アルゴリズムの組み込みサポートにより、YOLO11は車両がシーン内を移動する間、一貫したIDを維持できます。この安定した追跡は、Re-IDシステムが引き継ぐ前のIDの切り替わりを減らし、最終的にカメラ間照合の精度を向上させます。
Link to this sectionアイデンティティの安定性を向上させるオプションのトラッカーレベルRe-ID#
標準的なモーションベースの追跡に加えて、Ultralytics Pythonパッケージには、BoT-SORTトラッカー内のオプションとして外見ベースのRe-ID機能が含まれています。つまり、トラッカーはモーションパターンやバウンディングボックスの重なりだけでなく、視覚的な外見特徴を使用して、2つの検出結果が同一車両であるかを判断できます。
有効にすると、BoT-SORTは検出器やYOLO11分類モデルから軽量の外見エンベディングを抽出し、フレーム間のアイデンティティ検証に使用します。この追加の外見上の手がかりは、短い遮蔽、車両同士の接近、カメラの動きによるわずかな変化といった困難な状況でも、トラッカーがより安定したIDを維持するのに役立ちます。
この組み込みRe-IDは、完全なカメラ間車両再識別を置き換えることを意図したものではありませんが、単一カメラビュー内でのアイデンティティの一貫性を向上させ、後続のRe-IDモジュールが信頼できるクリーンなトラッキングデータを作成します。これらの外見ベースの追跡機能を使用するには、BoT-SORTトラッカーの設定ファイルで「with_reid」を「True」に設定し、外見特徴を提供するモデルを選択するだけで済みます。
詳細については、利用可能なRe-IDオプションとその設定方法を解説しているUltralyticsの物体追跡に関するドキュメントページをご覧ください。
Link to this sectionRe-IDネットワークへの高品質な入力の提供#
追跡中のアイデンティティ安定性の向上に加え、YOLOモデルはRe-IDネットワーク自体に対してクリーンな視覚的入力を準備する重要な役割も果たします。
車両が検出されると、そのバウンディングボックスは通常クロップされ、照合に必要な視覚的特徴を抽出する再識別ネットワークに送られます。Re-IDモデルはこれらのクロップ画像に強く依存しているため、ぼやけ、位置ずれ、不完全なクロップなどの低品質な入力は、エンベディングの精度を低下させ、カメラ間照合の信頼性を損なう可能性があります。
Ultralytics YOLOモデルは、目的の車両を完全に捉えるクリーンで正確に配置されたバウンディングボックスを継続的に生成することで、これらの問題を軽減します。より明確で正確なクロップが得られるため、Re-IDネットワークは色、形状、テクスチャ、その他の特徴的な詳細に集中できます。高品質な入力は、カメラビュー全体でより信頼性が高く正確なRe-IDパフォーマンスにつながります。
Link to this sectionRe-IDモデルとの組み合わせによるカメラ間照合の実現#
Ultralytics YOLOモデル自体は再識別を行いませんが、異なるカメラビュー間で車両を比較するためにRe-IDネットワークが必要とする重要な情報を提供します。YOLO11のようなモデルは各カメラ内での車両の場所の特定と追跡を担当し、Re-IDモデルは異なる場所からの2つの車両クロップが同一のアイデンティティであるかを判断します。
検出と追跡を行うYOLOと、特徴抽出を行う専用の埋め込みモデルというこれらのコンポーネントが連携することで、完全なマルチカメラ車両照合パイプラインが構築されます。これにより、大規模なカメラネットワーク内を移動する同一の車両を関連付けることが可能になります。
例えば、最近の研究では、研究者らがオンラインマルチカメラ追跡システムにおいて、軽量なYOLO11モデルを車両検出器として使用しました。その研究結果によると、YOLO11を使用することで精度を犠牲にすることなく検出時間を短縮でき、その結果、後続の追跡およびカメラ間照合の全体的なパフォーマンスが向上したことが分かりました。

図3. 複数カメラ間でのYOLO11ベースの多車両追跡および再識別 (ソース)
Link to this section車両Re-IDのためのディープラーニングベースのアーキテクチャ#
Ultralytics YOLOモデルが車両の再識別をどのようにサポートできるかを理解したところで、特徴抽出と照合ステップを担うディープラーニングモデルについて詳しく見ていきましょう。これらのモデルは、車両の外見を学習し、堅牢なエンベディングを作成し、異なるカメラビュー間で視覚的に類似した車両を区別する役割を担います。
物体再識別システムで使用される主要なディープラーニングコンポーネントの例をいくつか挙げます:
-
CNNによる特徴抽出: ResNet50やResNet101のような畳み込みニューラルネットワークは、パターン認識を通じて深い特徴を学習し、色、形状、テクスチャなどの要素を特定して車両を区別します。これらの学習されたパターンは、車両独自のデジタル表現として機能するエンベディングに変換されます。
-
アテンションメカニズムとTransformer: 空間的アテンションを含むアテンションネットワークや層は、ヘッドライト、窓、ナンバープレート領域といった車両の重要な領域を強調するのに役立ちます。空間的アテンションは、最も有益な視覚的手がかりがある場所にモデルを集中させ、一方、Vision Transformer (ViT) のようなTransformerベースのモデルは画像全体のグローバルな関係性を捉えます。これらが組み合わさることで、車両の外見が非常に似ている場合の微細な精度が向上します。
-
パーツベースおよびマルチブランチネットワーク: 一部のRe-IDモデルは、ルーフ、テールライト、サイドパネルといった特定の車両領域を個別に分析し、その結果を統合します。これにより、車両が部分的に遮蔽されている場合や難しい角度から見られている場合でも、システムは堅牢性を維持できます。
これらのアーキテクチャコンポーネントに加え、メトリック学習は車両Re-IDモデルのトレーニングにおいて重要な役割を果たします。Triplet loss、Contrastive loss、Cross-entropy lossといった損失関数は、同一車両の画像を近づけ、異なる車両を遠ざけることで、システムが強力で識別能力の高いエンベディングを学習するのを助けます。
Link to this section人気のある車両再識別データセットとベンチマーク#
コンピュータビジョン研究において、データセットの品質はモデルのデプロイ後のパフォーマンスに大きな影響を与えます。データセットは、モデルが学習するためのラベル付けされた画像やビデオを提供します。
車両の再識別において、最先端のデータセットは、照明、視点の変化、天候の変化といった多様な条件を捉えている必要があります。この多様性が、現実世界の交通環境の複雑さをモデルが処理するのを助けます。
車両再識別モデルのトレーニング、最適化、評価をサポートする人気のあるデータセットの概要を以下に示します:
- VeRi-776データセット: これは、20台の都市カメラからキャプチャされた50,000枚以上の注釈付き車両画像を集めたものです。注釈には車両ID、色、モデル、ナンバープレート領域が含まれており、詳細な特徴学習が可能です。
- VehicleIDデータセット: この大規模なデータセットには、26,000台以上の車両を表す200,000枚以上の画像が含まれています。スケーラビリティの研究や、異なる手法間のベースライン比較を行うためによく選択されます。
- VeRi-Wildデータセット: 視点、天候、部分的な遮蔽の違いなど、現実世界の変動を反映するように設計されています。モデルの堅牢性と汎用性を評価するためによく使用されます。

図4. VeRi-776データセットに含まれる車両の例 (ソース)
これらのデータセットにおけるモデルのパフォーマンスは、通常、平均精度(mAP)やRank-1またはRank-5の精度などのメトリクスを使用して評価されます。mAPはモデルが特定の車両に対して関連するすべての一致項目をどれだけ正確に取得できるかを測定し、Rank-1およびRank-5スコアは、正しい一致が結果リストのトップまたは最初の数件の予測内にあるかを示します。
これらのベンチマークは、研究者に異なるアプローチを比較するための整合性のとれた手段を提供し、現実世界で使用するための、より正確で信頼性の高い車両再識別システムの開発を導く上で重要な役割を果たします。
Link to this section車両の再識別の用途#
基本事項を網羅したところで、車両の再識別が実用的な交通、モビリティ、監視のワークフローをサポートする現実世界のユースケースをいくつか見ていきましょう。
Link to this section都市交通の監視とモニタリング#
忙しい都市の道路は常に動きで溢れており、交通カメラは車両が異なるエリア間を移動する際、同一の車両を追跡し続けることに苦労することがよくあります。照明の変化、混雑したシーン、そしてほぼ同一に見える車両は、カメラ間でアイデンティティが失われる原因となります。
車両の再識別は、車両を明確に検出し、特徴的な特徴を抽出し、低解像度や混雑した映像の中でも一貫したIDを維持することで、この問題に対処します。その結果、ネットワーク全体でのよりスムーズで継続的な追跡が可能になり、交通チームは車両が都市をどのように移動しているかをより明確に把握でき、渋滞や事故に対してより迅速で的確な対応ができるようになります。
Link to this sectionスマートパーキングシステム#
スマートパーキング施設は、入退場、アクセス制御、スペースの割り当てを管理するために一貫した車両識別を必要とします。しかし、これらの環境内のカメラは、地下ガレージ、日陰エリア、夕暮れの屋外駐車場など、珍しい角度や困難な照明条件下で車両を捉えることがよくあります。
これらの条件下では、異なるゾーンで同一の車両が見られているかを確認することが困難になります。アイデンティティが一貫していないと、駐車記録が断片化し、アクセス制御の信頼性が低下し、ドライバーが遅延を経験する可能性があります。そのため、多くのスマートパーキングシステムでは、施設内を移動する各車両の安定したアイデンティティを維持するために、車両再識別モデルが組み込まれています。
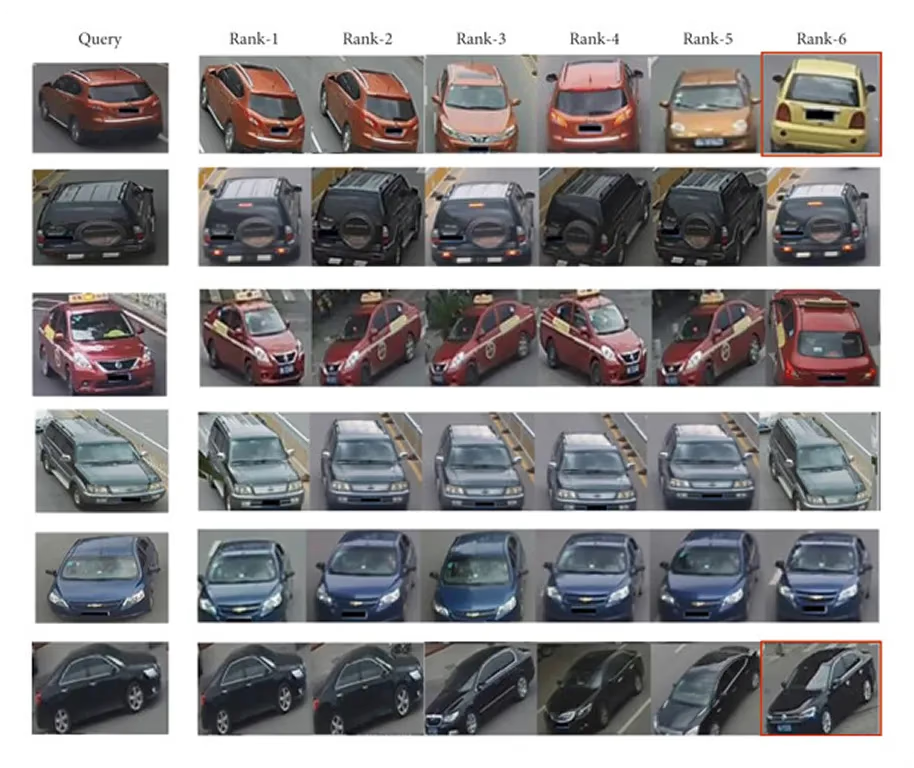
図5. 左側に選択された車両画像、右側に一致する検索結果を表示する車両再識別の例 (ソース)
Link to this section法執行機関とフォレンジック#
交通監視の上に構築される車両の再識別は、法執行機関や法医学調査においても重要な役割を果たします。多くの場合、捜査官は複数のカメラにわたって車両を追跡する必要がありますが、ナンバープレートが読めなかったり、欠落していたり、故意に隠されていたりすることがあります。
混雑したシーン、視界の悪さ、部分的な遮蔽により、異なる車両が紛らわしいほど似て見えることがあり、手動での特定は遅く信頼性に欠けるものになります。車両の再識別は、ナンバープレートのみに頼るのではなく、車両の視覚的特徴を分析することで、重なり合わないカメラネットワーク間で車両の動きを追跡するために使用できます。
これは、捜査官が車両の動きをより簡単に追跡し、いつ異なる場所に出現したかを把握し、インシデントの前後における経路を確認できることを意味します。AIを搭載した車両Re-IDは、不審車両の追跡、インシデント映像の確認、イベントの前後で車両がどちらの方向に走行したかを特定するといったタスクもサポートします。
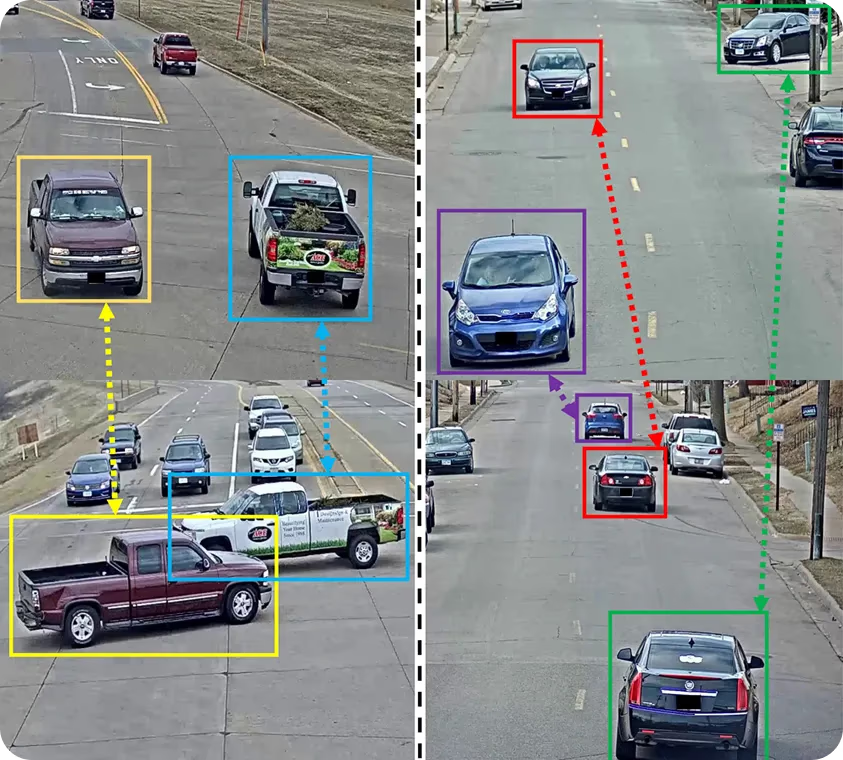
図6. さまざまな視点を持つ異なるカメラ間で照合された車両 (ソース)
Link to this sectionフリートおよび物流の追跡#
フリートや物流事業は、車両の動きを追跡するためにGPS、RFIDタグ、手動ログに頼ることがよくありますが、これらのツールは、積み込みベイ、倉庫ヤード、内部道路ネットワークなど、セキュリティカメラやヤードカメラでカバーされるエリアに空白を残します。
車両は重なり合わないカメラ間を頻繁に移動したり、構造物の後ろに消えたり、フリート内の他の車両とほぼ同じ外見をしていたりするため、異なる場所で同一の車両が確認されたかどうかを判断するのが困難です。車両再識別システムは、視覚的な詳細情報とタイミング情報を分析して、各車両が施設内を移動する間の一貫したアイデンティティを維持することで、これらの空白を埋めるのに役立ちます。
これにより、フリート管理者はハブ内のアクティビティをより完全に把握でき、配送経路の確認、異常な動きの特定、車両が予想されるルートに従っていることの確認といったタスクをサポートできます。
Link to this section車両Re-IDタスクの長所と短所#
AIを活用した車両再識別を使用する主な利点をいくつか挙げます:
- 手動ワークロードの削減: 車両Re-IDは、広範な手動レビューを必要とするアイデンティティ照合タスクを自動化し、ビデオ映像の分析に必要な時間と労力を大幅に削減します。
- 自動化とリアルタイムの洞察: 検出、追跡、特徴照合を組み合わせることで、車両Re-IDは継続的な自動モニタリングをサポートし、より迅速なインシデント対応のためにリアルタイムのアラートを提供できます。
- スケーラビリティと適応性: Re-IDモデルは、堅牢な特徴学習、マルチスケール特徴抽出、および視覚的変化の下でも安定した不変表現を通じて、新しい環境、照明条件、カメラ角度に適応できます。これらの機能により、大規模な都市ネットワークと小規模なデプロイの両方に適しています。
車両の再識別には多くの利点がありますが、考慮すべき制限もいくつかあります。現実世界の環境において信頼性に影響を与える要因をいくつか挙げます:
- 高い計算負荷: 特徴抽出、エンベディング生成、カメラ間照合には、特に大規模なカメラネットワークを監視する場合、かなりの処理能力が必要です。
- 環境の変動性: 夜間の照明、天候の変化、影、遮蔽といった要因は、シーン間で一貫したアイデンティティを維持するモデルの能力を低下させる可能性があります。
- データセットとドメインの制限: 限られた、または理想化されたデータセットでトレーニングされたモデルは、さらなる微調整やドメイン適応を行わないと、現実世界の条件に対してうまく汎化できない場合があります。
Link to this section車両再識別手法の今後の展望#
車両の再識別技術は、技術の進化とともに前進し続けています。IEEE、CVPR、arXivからの最近の出版物や国際会議での発表は、複数のデータソースと、より高度な特徴推論を組み合わせた、より豊かなモデルへの明確なシフトを強調しています。この分野における今後の研究は、より堅牢で効率的であり、かつ現実世界の変動を大規模に処理できるシステムの構築に焦点を当てる可能性が高いです。
例えば、有望な方向性の一つは、Transformerベースのモデルとグラフ集約ネットワークの使用です。Transformerは画像全体を分析し、すべての視覚的な詳細がどのように組み合わさっているかを理解できるため、システムは角度や照明が変化しても同一の車両を認識しやすくなります。
グラフベースのモデルは、車両の異なる部位やカメラの視点をネットワーク内の接続された点として扱うことで、これをさらに一歩推し進めています。これにより、システムはそれらの主要な点間の相関関係を理解し、車両の識別情報や識別的特徴についてより的確な判断を下せるようになります。
もう一つの重要な進歩は、multi-modal data fusionと特徴融合です。新しいシステムは画像のみに頼るのではなく、視覚情報とGPSデータやセンサーからの動作パターンといった他のマルチメディア信号を組み合わせます。この追加のコンテキストにより、車両が部分的に隠れている場合や照明が不十分な場合、あるいはカメラの角度が急激に変化した場合でも、システムが精度を維持しやすくなります。
Link to this section重要なポイント#
車両の再識別はインテリジェント交通システムにおける重要な手法になりつつあり、都市が複数のカメラ間でより確実に車両を追跡するのに役立っています。ディープラーニングの進歩と、より豊富で多様なデータセットを使用した検証の向上により、これらのシステムは現実世界の条件下でより正確かつ実用的になっています。
技術の進化に伴い、イノベーションとプライバシー、セキュリティ、倫理に関する責任ある実践とのバランスを取ることが重要です。総じて、これらの進歩はよりスマートで安全、かつ効率的な交通ネットワークへの道を切り拓いています。
私たちのGitHub repositoryにアクセスし、communityに参加して、AIについての詳細を学びましょう。当社のソリューションページでAI in roboticsやcomputer vision in manufacturingについて学び、our licensing optionsをチェックして、今すぐVision AIを使い始めましょう!






