Ultralytics YOLOモデルによる衝突予測の向上
Ultralytics YOLOモデルからの知見が、衝突予測システムにおいて、動的な環境下でより安全かつ迅速な意思決定をどのようにサポートするかを学びます。
道路上では慎重に運転していても、事故は起こり得ます。車が車線変更をする、歩行者が横断歩道ではない場所を渡る、あるいは自転車が予期せず加速するなどです。このような日常的な瞬間こそ、衝突予測システムが真価を発揮し、人々の安全を守るのに役立ちます。
以前、私たちはボールの軌道予測について調査し、高速で動くボールの経路を予測することが、スポーツアナリティクスにおいて動きを理解し、次に何が起こるかを予測するのにどのように役立つかを見てきました。衝突予測も同様の仕組みで機能します。
これらの予測システムは、本質的に未来を見通します。車両や歩行者の動きを監視することで、リスクを早期に察知し、事態が危険な方向に転じる前(モーションプランニングやパスプランニングとも呼ばれます)に、経路や行動を調整することができます。
衝突予測システムの背後にある主要なコンピュータサイエンス技術は、人工知能とそのサブ分野であり、コンピュータビジョンや、物体がどのように動くかを予測する予測手法が含まれます。例えば、Ultralytics YOLO11や次期モデルのUltralytics YOLO26のようなコンピュータビジョンモデルを使用して、車両や歩行者などの物体をリアルタイムで検出し追跡し、それらの情報を基に予測モデルが次なる動きを推定します。
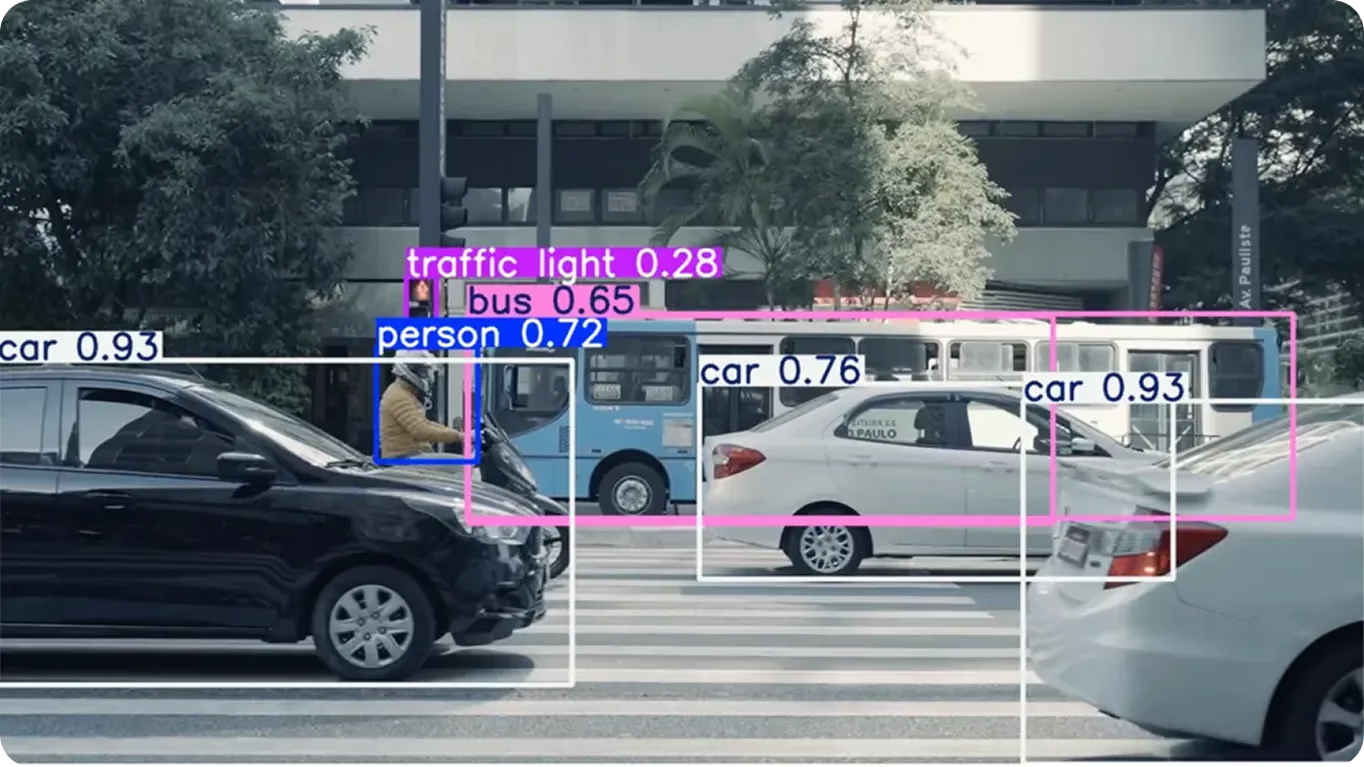
図1。YOLO11を使用して道路上の物体を検出する例(ソース)。
その結果、周囲の状況を把握し、ダイナミックな環境下でより賢明な意思決定をサポートするAIシステムが実現します。この記事では、衝突予測の仕組み、その背景にある手法、そしてコンピュータビジョンとUltralytics YOLOモデルが果たす役割について解説します。それでは始めましょう!
Link to this section衝突予測とは何か?#
衝突予測とは、AIシステムが物体の動きを理解し、いつ物体同士が極めて接近するか、あるいは接触するかを予見する能力のことです。さまざまなシステムがこの情報を活用しており、安全機能のサポート、移動の最適化、共有スペースにおける動作の調整などに役立てられています。
高速道路上の車、倉庫の通路でのフォークリフト、あるいは横断歩道を渡る歩行者など、物体が共有スペースを移動するあらゆる場所で、衝突予測はこれらの相互作用がどのように展開されるかを理解するのに役立ちます。安全を重視したアプリケーションでは、この先見性を用いてリスクを低減でき、他の環境ではルート計画、タイミング調整、あるいは協調的な移動といったタスクを支援できます。
例えば、先進運転支援システム(ADAS)を搭載した近年の車両の多くでは、カメラとセンサーが前方の道路を監視し、車が近くの物体にどれくらいの速度で接近しているかを推定します。システムが危険な状況になり得ると判断した場合、ドライバーに警告を発し、状況によっては自動ブレーキが作動して衝撃を軽減します。
Link to this section衝突予測の4つのステップを探る#
衝突予測には、AIの各コンポーネントが連携して物体を識別し、その動きを追跡し、次に何が起こるかを推定する協調プロセスが含まれます。これらのシステムは通常、オブジェクト検出、オブジェクトトラッキング、軌道予測、そして最後に衝突予測という4つの関連した段階を経て機能し、各段階が前のステップの精度の上に成り立っています。
次に、各段階の仕組みを詳しく見ていきましょう。
Link to this sectionオブジェクト検出の概要#
オブジェクト検出は、ビジョンAIモデルが画像やビデオフレーム内の物体を識別し、その位置を特定する重要なコンピュータビジョンのタスクです。ピクセルデータを分析することで、オブジェクト検出モデルは主に、バウンディングボックス、オブジェクトクラス、信頼度スコアという3つの出力を行います。バウンディングボックスは物体の位置を示し、オブジェクトクラスは車、歩行者、自転車などの物体の種類を示し、信頼度スコアはモデルがその予測に対してどれほど確信を持っているかを表します。
YOLO11やYOLO26のようなビジョンAIモデルはこの基盤の上に構築されており、オブジェクト検出、オブジェクトトラッキング、方向付きバウンディングボックス(OBB)検出など、いくつかの関連タスクをサポートしています。オブジェクト検出は予測システムに各フレーム内の内容を伝え、トラッキングは物体が移動するにつれてその物体を追いかけ、方向付きバウンディングボックスはさまざまな角度で見える物体に対してより正確な形状を提供します。
この段階では、衝突予測システムは視覚データの中に何が存在するかを理解することに専念しています。これは後続のすべてのステップが依存する情報の基盤を形成しますが、まだ物体がどのように動き、相互作用するかは考慮されていません。
Link to this sectionオブジェクトトラッキングの概要#
物体が検出されたら、次のステップはフレーム間でそれらを追跡し、時間経過に伴う動きをシステムが理解できるようにすることです。検出機能は各フレームごとに新しいバウンディングボックスを提供しますが、オブジェクトトラッキングは、時間の経過とともにそれらの検出を関連付けることで継続性をもたらします。
Ultralytics PythonパッケージでサポートされているByteTrackやBoT-SORTのようなトラッキングアルゴリズムは、各フレームの検出データを使用して、移動する物体を追跡します。これらのアルゴリズムは各物体に一意のIDを割り当て、物体が高速で移動したり、部分的に隠れたりしても、その識別情報を維持します。これにより、物体の動きを捉えたスムーズなトラッキング履歴が作成されます。

図2。YOLOを使用して異なる検出に一意のIDを割り当てる様子(ソース)
これら2つのトラッキング手法がどのように機能するかを簡単に説明します。
- ByteTrack: 高信頼度および低信頼度の両方の検出結果を使用して一貫したオブジェクトIDを維持します。カルマンフィルタによるモーション予測が、物体が高速で移動したり、短時間検出が困難な場合に、トラッカーの安定を保つのに役立ちます。
- BoT-SORT: このアルゴリズムは、カルマンフィルタのモーション予測と外観の手がかりを組み合わせることでSORTを拡張し、混雑したシーンや部分的なオクルージョン(遮蔽)が発生した場合でも、トラッカーがより確実に物体を追跡できるようにします。
これらのトラッキング手法のパフォーマンスを測定するために、研究者は確立されたマルチオブジェクトトラッキング(MOT)データセットやベンチマークを使用して評価を行います。また、一般的に使用される指標には、トラッキング品質全体を反映する多物体追跡精度(MOTA)、物体の同一性がどの程度一貫して維持されているかを測定する識別F1スコア(IDF1)、検出パフォーマンスと関連付け精度の両方をバランスよく考慮した高次トラッキング精度(HOTA)があります。
Link to this section軌道予測の理解#
複数のフレームにわたって物体を追跡した後、次のステップはそれが次にどこへ行くかを予測することです。これは軌道予測として知られています。検出が物体を見つけ、トラッキングがその動きを追う一方で、予測は先を見越して将来の位置を推定します。
オブジェクトのバウンディングボックス、フレーム間の位置、割り当てられたIDといった検出とトラッキングからの情報を利用して、速度、方向、移動パターンなどのモーション特徴を計算できます。これらの導き出された洞察により、予測モデルは数秒後に物体がどこにいる可能性が高いかを推定するために必要なデータを得ることができます。
トラッキングデータに欠落や急激な跳ね上がりがある場合、補間技術がよりスムーズで一貫した軌道を再構築するのに役立ちます。これにより、ノイズの多い、あるいは不完全な位置データではなく、高品質のモーション入力が予測モデルに渡されることが保証されます。
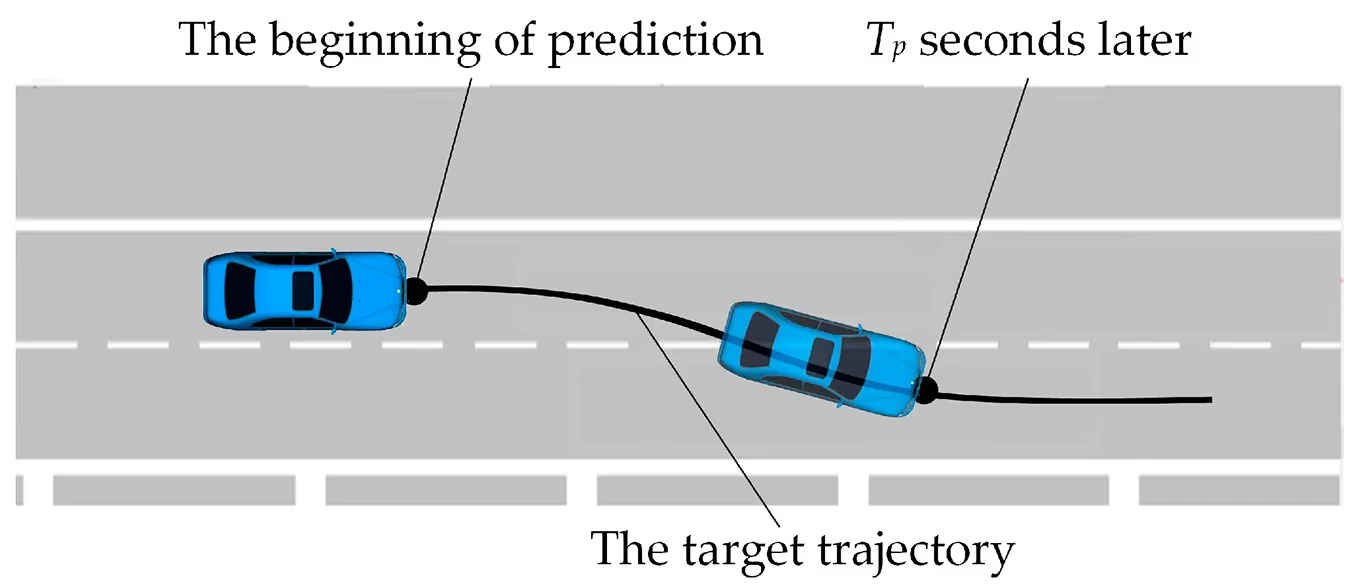
図3。車の軌道予測の視覚化。(ソース)
これらの予測を行うために、多くのシステムは物体の動きが時間とともにどのように変化するかを理解するように設計されたディープラーニングモデルに依存しています。過去の位置のシーケンスとそれから導き出されたモーション特徴を分析することで、これらのモデルは一般的な移動パターンを学習し、その知識を利用して将来の経路を予測します。
軌道予測によく使用されるディープラーニングおよび機械学習のアプローチをいくつか紹介します。
-
リカレントニューラルネットワーク(RNN): RNNは、ビデオフレームのシーケンスのようなシーケンスデータを処理するように設計されたディープラーニングモデルです。以前の位置の記憶を保持し、その情報を使用して物体がどのように動いてきたかを理解できます。これは、加速、減速、直線移動といった単純な動きのパターンをシステムが認識するのに役立ちます。
-
長短期記憶ネットワーク(LSTM): LSTMは、より長い期間の情報を記憶できる、より高度なRNNの一種です。これにより、車両が曲がる準備をしている様子や、歩行者が方向を変えるといった複雑な動きを捉えることができます。長いトレンドを追跡できるため、混雑した環境でより信頼性の高い予測を生み出すことがよくあります。
-
Transformer: Transformerは全モーションシーケンスを処理し、アテンションメカニズムを使用してそれらのシーケンスの最も重要な詳細に焦点を合わせます。これにより、合流する車両や交差する歩行者のように、複数の物体が相互作用するシーンで特に効果を発揮します。
これらのモデルは短期および長期の経路を予測できます。通常2秒未満の短期予測が最も正確ですが、2秒から6秒のような長い期間の予測は、先を見通すことができる反面、不確実性が高まります。
Link to this sectionすべてをまとめる:衝突検出アルゴリズム#
最終段階である衝突予測では、システムはこれまでに学習したすべてのこと、つまり各物体が何であるか(検出)、どのように動いてきたか(トラッキング)、次にどこへ行く可能性が高いか(予測)を利用します。このステップでは、予測された経路のいずれかが、衝突につながる可能性のある方法で交差するかどうかを確認します。
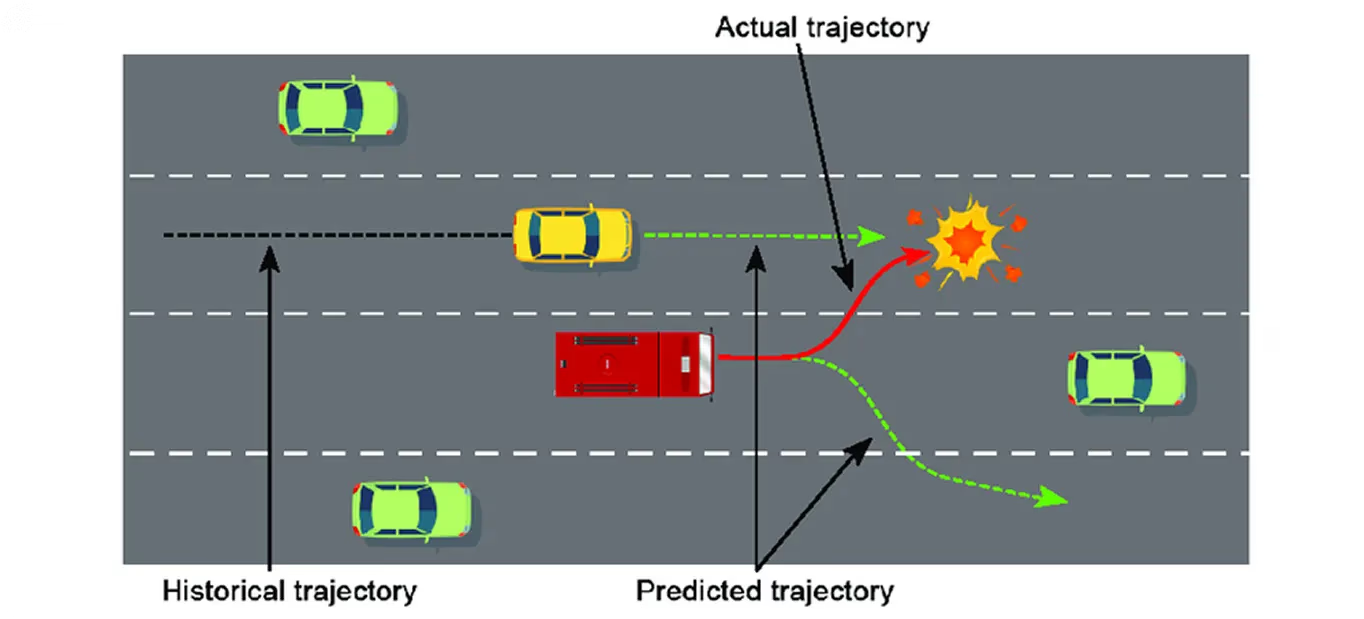
図4。衝突予測システムの仕組み(ソース)
自動運転車の場合、衝突チェックシステムは、車両、歩行者、自転車などの周囲の物体の将来の軌道を比較します。2つの予測経路が重なるか、非常に危険な距離まで接近した場合、システムはその状況を車両衝突の可能性があると判断します。衝突リスクがどれほど差し迫っているかを理解するために、システムは衝突予測時間(TTC)と呼ばれる値を計算します。
衝突予測時間(TTC)は、動きの速い環境における重要な測定基準です。これは、物体が現在の速度と方向を維持した場合に衝突するまでに残された時間を推定するものです。TTCが特定のしきい値を下回ると、システムは警告を発したり、ブレーキをかけたり、計画された経路を調整したりして対応できます。
Link to this section衝突予測の実際の応用#
衝突予測は、交通管理、スマートシティインフラ、産業オートメーション、モバイルロボティクスなど、多くの業界で重要性を増しています。最先端のコンピュータビジョンと予測モデルが進化し続けるにつれ、これらのシステムは動きを予測する能力をさらに高めています。
衝突予測と軌道予測がどのように機能するかを理解したところで、これらの手法がさまざまな現実世界の環境でどのように使用できるかを示す興味深い研究事例をいくつか見てみましょう。
Link to this section緊急車両向けのYOLO搭載衝突予測#
混雑した予測不可能な環境でのナビゲーションは、自動運転システムにとって最も困難な課題の一つであり、特に歩行者が明確なパターンに従わずに動く場合はなおさらです。緊急車両は、道路構造、車線、または歩行者の予測可能な行動に頼ることなく、密集した公共スペースを高速で移動する必要があるため、この問題にさらに頻繁に直面します。
このようなシナリオでは、事故を回避するために、人々がどこにいて、次の数秒間でどのように動く可能性があるかを理解することが不可欠です。例えば、最近の研究では、歩行者が多い環境で活動する緊急自動運転車(EAV)向けの完全な衝突予測パイプラインを構築することで、この課題を探求しました。
Link to this sectionYOLO搭載衝突予測パイプラインの仕組み#
この手法の仕組みを簡単に紹介します。
- YOLOを使用した歩行者検出: YOLOベースの検出器が各カメラフレーム内の歩行者を識別し、目視できる各人に対してバウンディングボックスを出力します。
- ByteTrackによるモーション追跡: ByteTrackアルゴリズムがフレーム間でこれらの検出をリンクし、各歩行者に一貫したIDを付与して、時間経過とともに彼らがどのように移動しているかを示すモーション履歴を作成します。
- 現実世界の位置推定: 逆遠近法マッピング(IPM)により、2Dピクセル座標が近似的な地上平面位置に変換され、車両に対して歩行者が現実空間のどこにいるかをシステムが理解するのに役立ちます。
- cGANを使用した鳥瞰図の生成: ある画像形式を別の形式に変換するAIモデルである条件付きGANが、シーンの鳥瞰図を生成します。このトップダウンレイアウトにより、歩行者の位置とその周囲の状況を解釈しやすくなります。
- LSTMモデルによる軌道予測: 各歩行者の過去の位置と移動パターンを使用して、LSTMモデルが次の数秒間に彼らがどこへ動く可能性が高いかを予測します。
- 衝突コーンを使用した効率的な衝突検出: 予測された軌道は衝突コーン法を用いて比較され、車両と歩行者の経路が交差するコース上にあるかどうかが判断されます。
- シグナルによる衝突回避: システムが衝突を予測すると、最適なタイミングで聴覚信号(ホーンやベルなど)を作動させます。このタイミングは、歩行者の行動に影響を与え、彼らが加速または減速して安全な場所に移動できるように選択されます。
Link to this sectionエッジビジョンとYOLOを使用した都市における歩行者の安全確保#
同様に、衝突防止へのもう一つのアプローチは、車両を超えてインフラそのものに焦点を当てています。車内のセンサーに頼る代わりに、この手法では横断歩道や交差点に設置されたスマートカメラを使用して、歩行者や車両の動きをリアルタイムで監視します。これらの場所は予測不可能であることが多く、人々が突然道路に飛び出したり、自転車が交通の中を縫うように走ったり、ドライバーが常に減速するとは限らないため、リスクを早期に検出することが重要です。
興味深い研究では、このアイデアをNAVIBoxと呼ばれるシステムを通じて探求しました。これは、交差点で直接車両と歩行者のリスクを予測するように設計されたエッジビジョンデバイスです。このシステムはUltralytics YOLOv8モデルを使用して歩行者と車両を検出し、軽量な重心トラッカーを使用してフレーム間でそれらを追跡します。これにより短く信頼性の高いモーション履歴が作成され、CCTVの斜めからのビューを道路のより鮮明な鳥瞰レイアウトに変換する遠近法変換を使用して洗練されます。
これらの洗練された軌道により、NAVIBoxは道路利用者が次の数秒間でどのように動く可能性が高いかを推定し、彼らの経路が交差する可能性があるかどうかを確認(交差テストとも呼ばれます)できます。システムが危険な相互作用を検出すると、リモートサーバーやネットワーク接続に依存することなく、ドライバー向けのディスプレイや歩行者向けのスピーカーを通じて直ちに警告を送信します。実際の都市部でのテストでは、NAVIBoxは真のリアルタイム応答に十分な速度で動作し、潜在的な衝突シナリオを正確に識別できることが示され、忙しい都市の交差点における実用的な安全ツールとなっています。
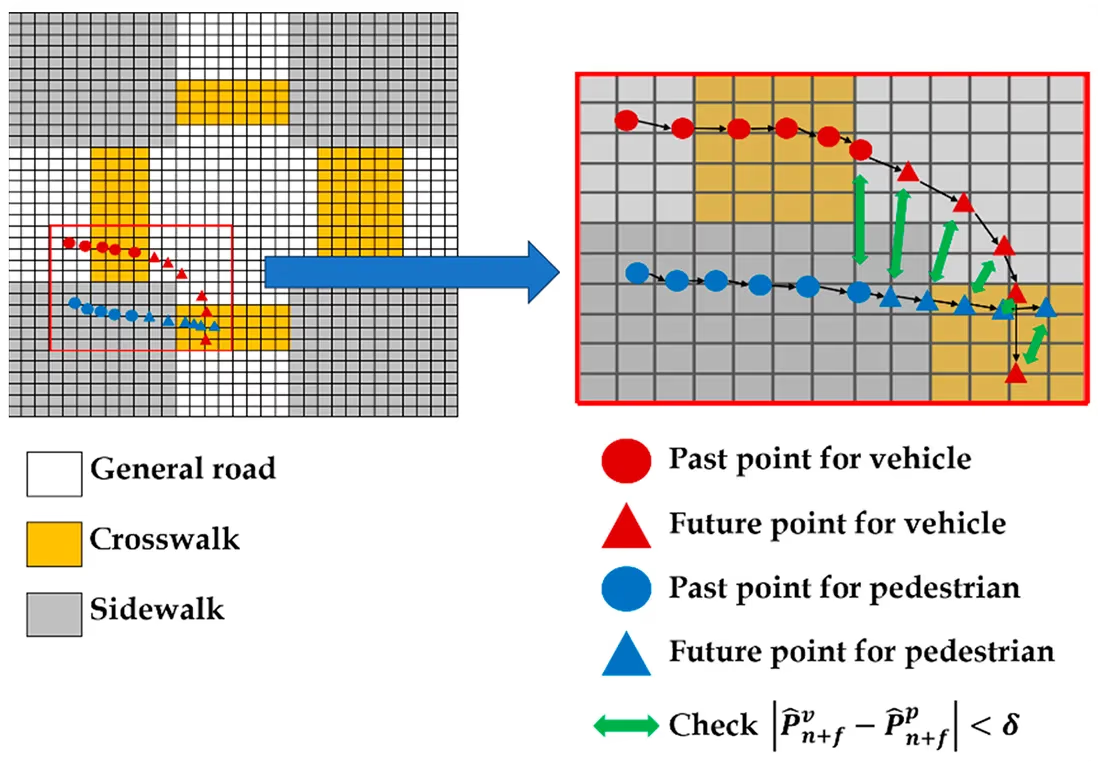
図5。車両と歩行者間の衝突リスクの予測。(ソース)
Link to this section衝突検出と予測の利点と欠点#
AIを活用した予測的衝突システムの利点をいくつか紹介します。
-
状況認識の向上: AIシステムは環境内で物体がどのように動くかを継続的にマッピングし、大規模な群衆の流れ、交通行動、または機械の経路についてより豊かな理解を提供します。
-
長期計画のためのデータ駆動型洞察: 検出、ニアミス、移動パターンを記録することで、AIシステムは都市計画者、安全チーム、フリート管理者が交差点の再設計、標識の改善、または運用ポリシーの精緻化に使用できるアナリティクスを提供します。
-
費用対効果の高いリスク防止: リスクが拡大する前に検出することで、これらのシステムはコストのかかる事故、保険金請求、または機器の修理を回避可能にします。
その利点にもかかわらず、衝突フリーシステムには特定の制限もあります。考慮すべきいくつかの課題を以下に示します。
- センサーとカメラの配置の制約: 不適切に配置された、あるいは角度の悪いカメラは、物体のサイズや距離を歪ませ、深度推定や軌道予測の信頼性を低下させる可能性があります。
- オクルージョン(遮蔽): 物体が他の物体の後ろに部分的に、または完全に隠れることがあります。これにより、モデルが視覚的な連続性を失うため、オブジェクトトラッキングが困難になります。
- 環境条件: 低照度、強い日光、雨、霧、またはカメラの品質不良は、モデルがシーンを明確に見る能力を低下させ、精度に影響を与える可能性があります。
Link to this section重要なポイント#
衝突予測は、2つの強力な能力を組み合わせたものです。現在の環境で何が起こっているかをシステムが理解するためのコンピュータビジョンと、次に何が起こる可能性が高いかを先読みするための軌道予測です。
これらの強みを組み合わせることで、マシンはリアルタイムで移動物体を検出し、数秒後にそれらの物体がどのように相互作用するかを予測できます。コンピュータビジョンと予測技術が進化し続けるにつれ、衝突予測は、より安全で、より信頼性が高く、スケーラブルな自動運転システムを構築するための鍵となるでしょう。
AIについて詳しく学ぶには、私たちのコミュニティとGitHubリポジトリをチェックしてください。ソリューションページでヘルスケアにおけるAIや製造業におけるコンピュータビジョンなどのアプリケーションを探索してみましょう。ライセンスオプションを確認し、今すぐ開発を始めましょう!






