2025年のベストなオブジェクト検知モデル
2026年における最適な物体検出モデルを詳しく解説します。主要なアーキテクチャ、パフォーマンスのトレードオフ、および実践的なデプロイの要素を検討します。
今年初め、AIおよび機械学習の先駆者であるAndrew Ng氏は、エージェント的物体検出(agentic object detection)の概念を導入しました。このアプローチでは、推論エージェントを使用し、膨大なトレーニングデータを必要とせずに、テキストプロンプトに基づいて物体を検出します。
膨大なラベル付きデータセットを必要とせずに画像や動画内の物体を識別できることは、よりスマートで柔軟なコンピュータビジョンシステムに向けた一歩です。しかし、エージェント的ビジョンAIはまだ初期段階にあります。
画像内の人物や道路標識を検出するような一般的なタスクは処理できますが、より正確なコンピュータビジョンのアプリケーションは依然として従来の物体検出モデルに依存しています。これらのモデルは、大規模で丁寧にラベル付けされたデータセットで学習され、何を検索すべきか、物体がどこにあるかを正確に把握します。
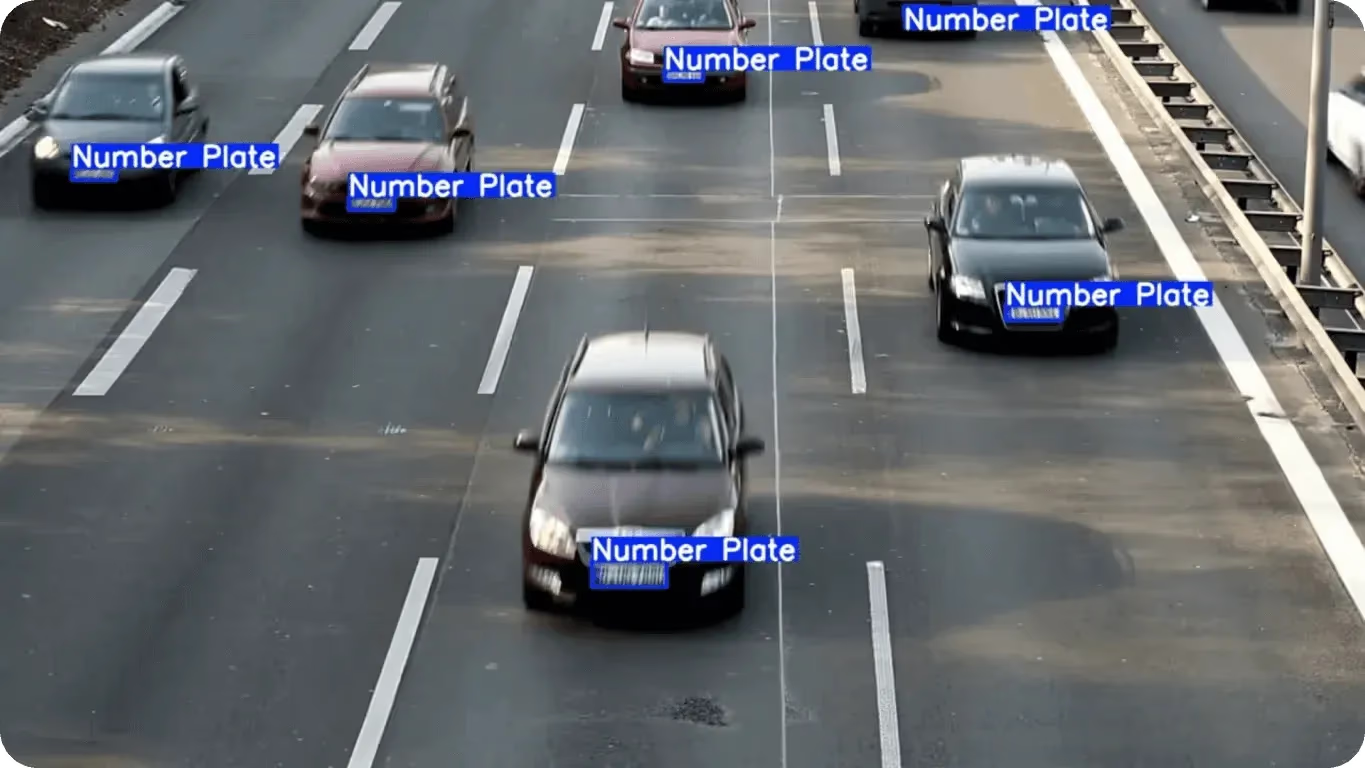
図1:物体検出の例。(ソース)
従来型の物体検出が不可欠である理由は、それが「物体とは何か」を特定する認識と、「画像内のどこにあるか」を特定するローカリゼーションの両方を提供するためです。この組み合わせにより、自動運転車から産業オートメーション、ヘルスケア診断に至るまで、複雑な実世界のタスクを確実に実行できるようになります。
技術の進歩のおかげで、物体検出モデルは継続的に改善されており、より高速で高精度になり、現実環境への適応力も高まっています。この記事では、現在利用可能な最高の物体検出モデルをいくつかご紹介します。それでは始めましょう!
Link to this section物体検出のニーズ#
コンピュータビジョンタスクの画像分類などを使用して、画像に車、人、その他の物体が含まれているかどうかを判断することはできます。しかし、その物体が画像内のどこにあるかを特定することはできません。
ここで物体検出が重要な役割を果たします。物体検出モデルは、どの物体が存在するかを識別し、その正確な位置を特定できます。ローカリゼーションと呼ばれるこのプロセスにより、機械はシーンをより正確に理解し、自動運転車の停止、ロボットアームの誘導、医療画像内の特定の領域の強調表示など、適切に対応できるようになります。
ディープラーニングの台頭は、物体検出を変革しました。手書きのルールに頼るのではなく、最新のモデルはアノテーションと視覚データから直接パターンを学習します。これらのデータセットは、モデルに対して、物体がどのように見えるか、通常どこに現れるか、また小さな物体、複雑なシーン、さまざまな照明条件などの課題にどう対処するかを教えます。
実際、最先端の物体検出システムは、一度に複数の物体を正確に検出できます。これにより、物体検出は自動運転、ロボット工学、ヘルスケア、産業オートメーションなどのアプリケーションにおいて重要な技術となっています。
Link to this section物体検出タスクの仕組み#
物体検出モデルへの入力は画像であり、それはカメラ、ビデオフレーム、あるいは医療スキャン画像などです。入力された画像は、通常、視覚データ内のパターンを認識するように学習された畳み込みニューラルネットワーク(CNN)を介して処理されます。
ネットワーク内では、画像は段階的に分析されます。検出された特徴に基づいて、モデルはどの物体が存在し、どこに現れるかを予測します。
これらの予測は、検出された各物体の周囲に描かれた長方形であるバウンディングボックスを使用して表現されます。すべてのバウンディングボックスに対して、モデルはクラスラベル(例:車、人、犬)と、予測に対する確信度を示すスコア(確率と考えることもできます)を割り当てます。
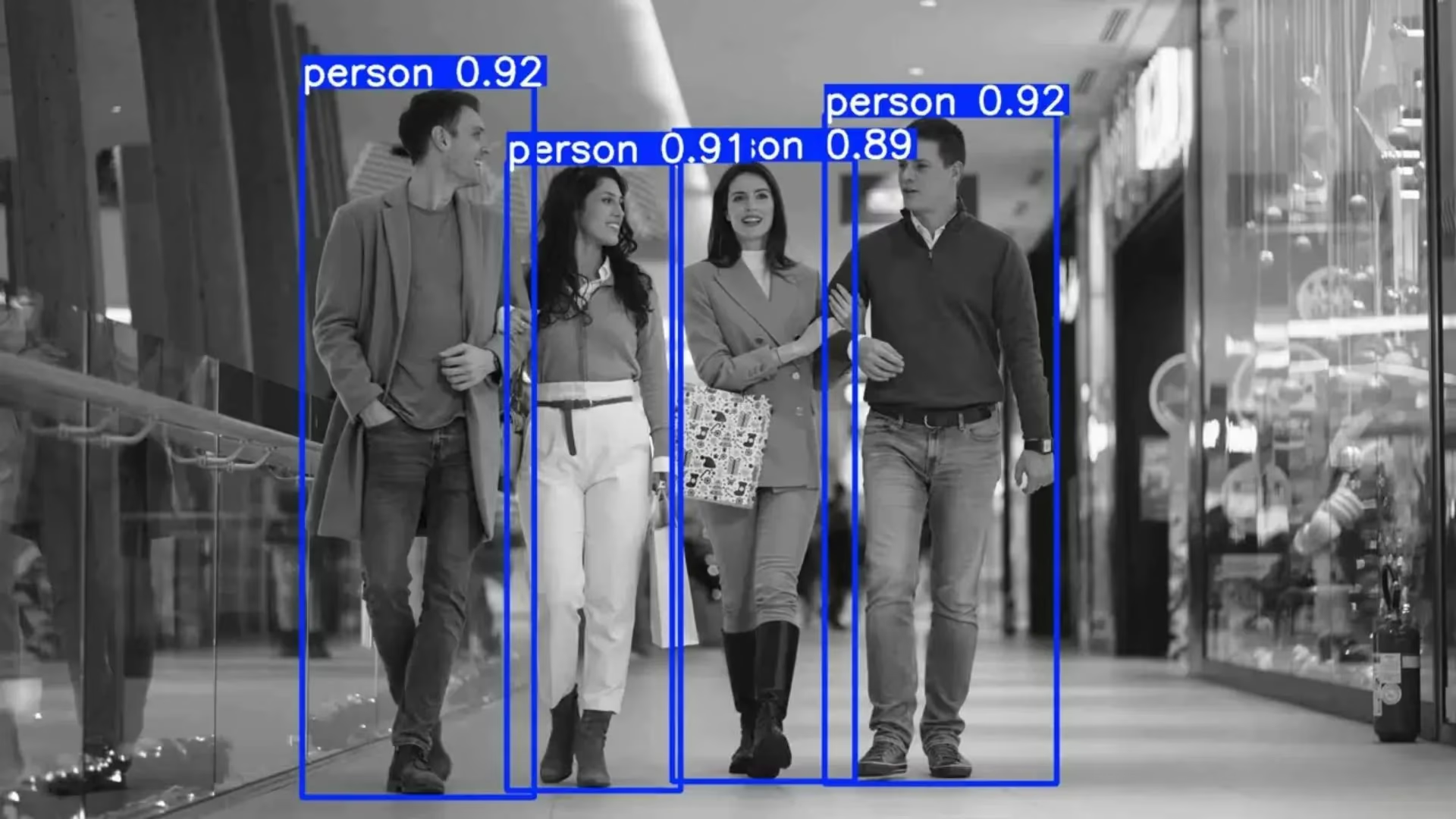
図2:物体検出の予測はバウンディングボックスを使用して視覚化できます。
全体的なプロセスは、特徴抽出に大きく依存しています。モデルは、エッジ、形状、テクスチャ、その他の識別特性など、有用な視覚的パターンを識別することを学習します。これらのパターンは特徴マップにエンコードされ、ネットワークがさまざまな詳細レベルで画像を理解するのに役立ちます。
Link to this section物体検出:2ステージと1ステージ#
モデルのアーキテクチャに応じて、物体検出器は異なる戦略を使用して物体を特定し、速度、精度、複雑さのバランスを取ります。
多くの物体検出モデル、特にFaster R-CNNのような2ステージ検出器は、対象領域(ROI)と呼ばれる画像内の特定の部位に焦点を当てます。これらの領域に集中することで、モデルはすべてのピクセルを均等に分析するのではなく、物体が含まれている可能性が高い領域を優先します。
一方で、初期のYOLOモデルのような1ステージモデルは、2ステージモデルのように特定のROIを選択しません。その代わり、画像をグリッドに分割し、アンカーボックスと呼ばれる事前定義されたボックスと特徴マップを使用して、画像全体にわたって一度のパスで物体を予測します。
今日、最先端の物体検出モデルでは、アンカーフリーのアプローチが検討されています。事前定義されたアンカーボックスに依存する従来の1ステージモデルとは異なり、アンカーフリーモデルは特徴マップから直接物体の位置とサイズを予測します。これにより、特にさまざまな形状やサイズの物体を検出する場合、アーキテクチャを簡素化し、計算オーバーヘッドを削減し、パフォーマンスを向上させることができます。
Link to this section最高の物体検出モデルを振り返る#
現在、多くの物体検出モデルが存在し、それぞれが特定の目標を念頭に置いて設計されています。リアルタイムのパフォーマンスに最適化されているものもあれば、最高の精度を達成することに重点を置いているものもあります。コンピュータビジョンソリューションに適したモデルを選択するかどうかは、多くの場合、特定のユースケースとパフォーマンス要件に依存します。
次に、2026年の最高のオブジェクト検出モデルをいくつか見ていきましょう。
Link to this sectionUltralytics YOLOモデル#
今日最も広く使用されている物体検出モデルファミリーの1つが、Ultralytics YOLOモデルファミリーです。YOLO(You Only Look Onceの略)は、高速で信頼性が高く、扱いやすい上に強力な検出パフォーマンスを提供するため、業界全体で人気があります。
Ultralytics YOLOファミリーには、Ultralytics YOLOv5、Ultralytics YOLOv8、Ultralytics YOLO11、そして近日公開予定のUltralytics YOLO26があり、さまざまなパフォーマンスやユースケースの要件に対応する幅広いオプションを提供しています。軽量な設計と速度の最適化により、Ultralytics YOLOモデルはリアルタイム検出に最適であり、計算能力とメモリが限られたエッジデバイスにもデプロイ可能です。
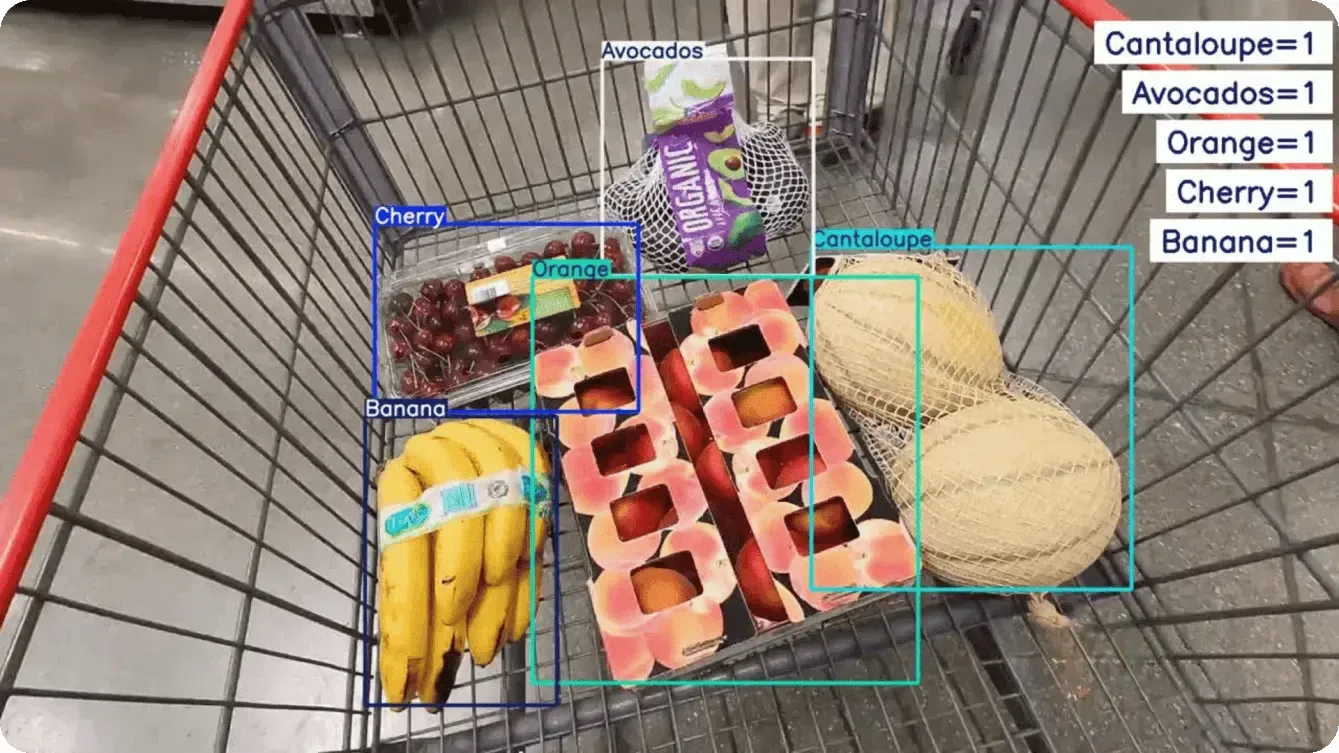
図3:Ultralytics YOLO11を用いた物体検出 (ソース)
基本的な物体検出を超えて、これらのモデルは非常に汎用性が高くなっています。ピクセルレベルで物体を輪郭抽出するインスタンスセグメンテーションや、人や物体のキーポイントを特定する姿勢推定(ポーズ推定)などのタスクもサポートしています。この柔軟性により、Ultralytics YOLOモデルは、農業や物流から小売、製造まで、幅広いアプリケーションで頼りになるオプションとなっています。
Ultralytics YOLOモデルが人気であるもう1つの重要な理由は、Ultralytics Pythonパッケージの存在です。これは、モデルのトレーニング、微調整、デプロイを行うためのシンプルで使いやすいインターフェースを提供しています。開発者は、事前学習済みウェイトから開始し、独自のデータセットに合わせてモデルをカスタマイズし、わずか数行のコードでデプロイできます。
Link to this sectionRT-DETRおよびRT-DETRv2#
RT‑DETR(Real-Time Detection Transformer)および新しいRT‑DETRv2は、リアルタイム使用のために構築された物体検出モデルです。多くの従来モデルとは異なり、非最大値抑制(NMS)を使用せずに、画像から最終的な検出結果を直接提供できます。
NMSは、モデルが同じ物体を複数回予測した場合に、重複する余分なボックスを削除するステップです。NMSをスキップすることで、検出プロセスはよりシンプルかつ高速になります。
これらのモデルは、CNNとTransformerを組み合わせています。CNNはエッジや形状などの視覚的な詳細を見つけ、Transformerは画像全体を一気に見て、各パーツがどのように関連しているかを理解できるニューラルネットワークの一種です。この包括的な理解により、モデルは互いに近い、または重なり合っている物体を検出できます。
RT‑DETRv2は、小物体と大物体の両方を見つけるのに役立つマルチスケール検出や、複雑なシーンへのより優れた対応など、オリジナルのモデルよりも機能が向上しています。これらの変更により、精度を向上させつつ、モデルの高速性を維持しています。
Link to this sectionRF-DETR#
RF‑DETRは、Transformerアーキテクチャの精度と実世界アプリケーションに必要な速度を組み合わせるように設計された、リアルタイムのTransformerベースのモデルです。RT‑DETRやRT‑DETRv2と同様に、Transformerを使用して画像全体を分析し、CNNを使用してエッジ、形状、テクスチャなどの細かい視覚的特徴を抽出します。
モデルは入力画像から直接物体を予測し、アンカーボックスと非最大値抑制をスキップするため、検出プロセスが簡素化され、推論の高速性が維持されます。RF‑DETRはインスタンスセグメンテーションもサポートしており、バウンディングボックスの予測に加えて、ピクセルレベルで物体の輪郭を抽出することができます。
Link to this sectionEfficientDet#
2019年後半にリリースされたEfficientDetは、効率的なスケーリングと高いパフォーマンスのために設計された物体検出モデルです。EfficientDetを際立たせているのはコンパウンドスケーリングです。これは、1つの要素だけを調整するのではなく、入力解像度、ネットワークの深さ、ネットワークの幅を同時にスケーリングする手法です。このアプローチにより、高性能タスク向けにスケールアップしても、軽量デプロイ向けにスケールダウンしても、モデルは安定した精度を維持できます。
EfficientDetのもう1つの重要なコンポーネントは、効率的な特徴ピラミッドネットワーク(FPN)であり、これによりモデルは複数のスケールで画像を分析できます。このマルチスケール分析は、さまざまなサイズの物体を検出するために重要であり、EfficientDetが同じ画像内の小物体と大物体の両方を確実に識別できるようにします。
Link to this sectionPP-YOLOE+#
2022年にリリースされたPP-YOLOE+はYOLOスタイルの物体検出モデルであり、画像全体を一回のパスでスキャンして物体を検出・分類します。このアプローチにより、高い精度を維持しながら、高速でリアルタイムアプリケーションに適しています。
PP-YOLOE+の主な改良点の1つはタスク整合学習(task-aligned learning)であり、これによりモデルの確信度スコアが物体の位置をどの程度正確に特定できたかを反映するのに役立ちます。これは、小さい物体や重なり合う物体を検出する場合に特に有用です。
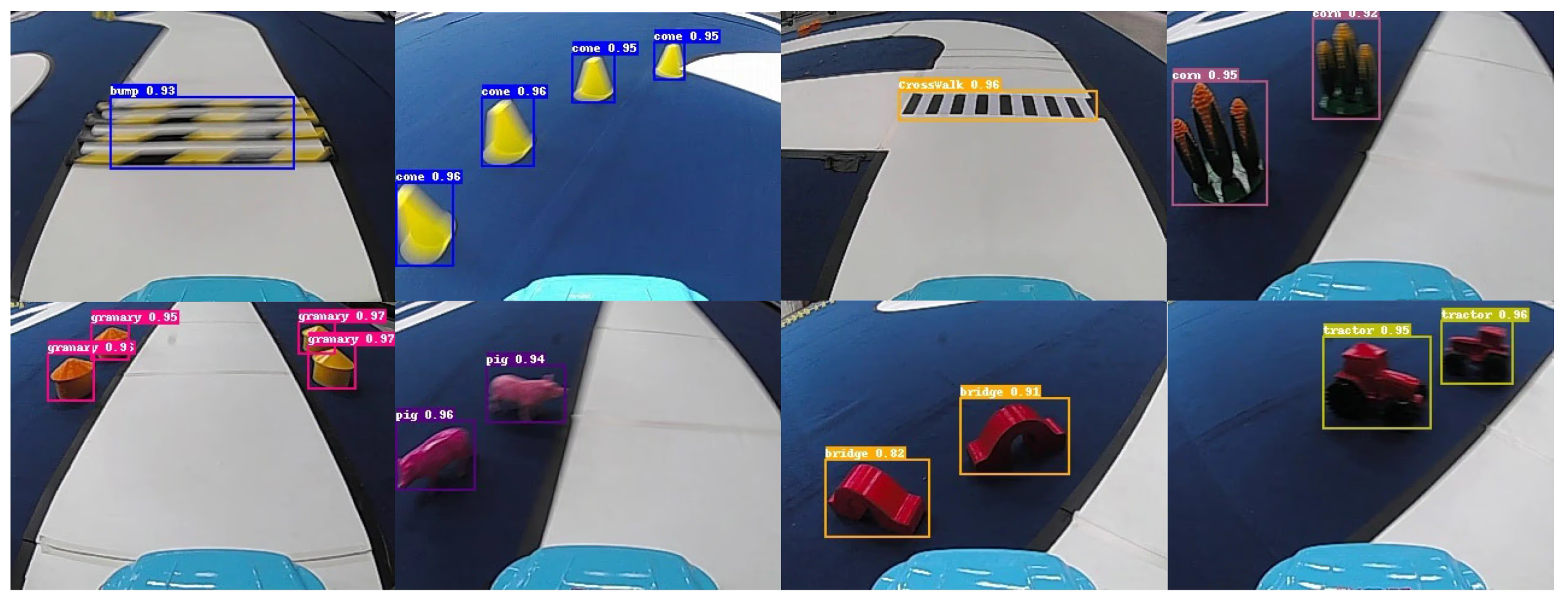
図4:PP-YOLOE+を使用して物体を検出 (ソース)
このモデルはまた、デカップルドヘッドアーキテクチャを採用しており、物体の位置予測タスクとクラスラベル予測タスクを分離しています。これにより、物体の分類を正しく行いながら、より正確にバウンディングボックスを描画できるようになります。
Link to this sectionGroundingDINO#
GroundingDINOは、視覚と言語を組み合わせたTransformerベースの物体検出モデルです。固定されたカテゴリセットに依存するのではなく、自然言語のテキストプロンプトを使用して物体を検出できるようにします。
画像からの視覚的特徴とテキスト記述を整合させることで、モデルは学習データにその正確なラベルが含まれていなかった場合でも、物体を特定できます。つまり、「ヘルメットをかぶった人」や「建物の近くの赤い車」といった記述でモデルをプロンプトすれば、一致する物体の周囲に正確なバウンディングボックスを生成します。
また、GroundingDINOはゼロショット検出をサポートしているため、新しいユースケースごとにモデルを再トレーニングしたり微調整したりする必要性が減り、幅広いアプリケーションにおいて非常に柔軟になります。この言語理解と視覚認識の組み合わせにより、インタラクティブで適応性の高いAIシステムへの新しい可能性が開かれます。
Link to this section物体検出器の評価に使用される一般的な指標#
さまざまな物体検出モデルを比較する際、どれが実際に最も優れたパフォーマンスを発揮するかをどうやって見分ければよいのか疑問に思うかもしれません。これは良い質問です。モデルのアーキテクチャやデータの品質以外にも、多くの要因がパフォーマンスに影響を与える可能性があるからです。
研究者は、モデルを一貫して評価し、結果を比較し、速度と精度のトレードオフを理解するために、共有されたベンチマークや標準的なパフォーマンス指標に依存することがよくあります。多くの物体検出モデルがCOCOデータセットのような同じデータセットで評価されているため、標準的なベンチマークは特に重要です。
Link to this section検出の精度と速度の測定#
物体検出モデルの評価に使用される一般的な指標を詳しく見ていきましょう。
- Intersection over union (IoU): この指標は、予測されたバウンディングボックスが画像内の実際の物体とどれだけ重なっているかを測定します。モデルによって描かれたボックスと、データセット内でラベル付けされた物体の位置であるグランドトゥルースボックスを比較します。IoUは、重なり領域の面積を2つのボックスの和集合の面積で割って計算されます。IoUが高いほど、モデルはより正確にボックスを配置していることを示し、IoUが低いほど、予測の精度が低いことを意味します。簡単に言えば、IoUはモデルの予測が実際の物体の位置とどれだけ一致しているかを示します。
- Mean average precision (mAP):これは、物体検出の全体的なパフォーマンスを評価するために使用される主要な指標です。モデルが正しく検出した物体の数と、さまざまな確信度レベルや物体カテゴリ全体にわたるそれらの検出の精度の両方を考慮します。
- Frames per second (FPS)およびレイテンシ:FPSは、モデルが1秒間に処理できる画像またはビデオフレームの数を示します。例えば、30 FPSで実行されるモデルは、1秒ごとに30フレームを処理できます。FPSが高いほどシステムはより速く応答でき、これはライブビデオ、交通監視、ロボット工学などのユースケースにとって重要です。一方、レイテンシは、モデルが画像やフレームを受信した瞬間から結果の準備ができるまでの処理にかかる時間を測定します。
Link to this section物体検出アルゴリズムを使用するメリットとデメリット#
実世界のアプリケーションで物体検出モデルを使用する主な利点をいくつか挙げます。
- 業界全体でのスケーリング: 物体検出は、交通監視や小売分析から、ヘルスケア、農業、製造に至るまで、幅広いユースケースに応用できます。
- 手作業の削減: 目視検査や監視タスクを自動化することで、人間の継続的な監視の必要性を減らし、チームがより価値の高い作業に集中できるようにします。
- オープンソースエコシステムの活用: GitHub上の活発なオープンソースコミュニティやリソースにより、事前学習済みモデルへのアクセス、実験、ソリューションのカスタマイズが容易になります。
これらの利点にもかかわらず、物体検出モデルのパフォーマンスに影響を与える実用的な制限があります。考慮すべき重要な要因をいくつか挙げます。
- 高品質データの要件: 物体検出モデルは、トレーニングのために大規模で適切にアノテーションされたデータセットに依存しています。このデータの作成と維持は、時間がかかり、コストがかかり、スケーリングが難しい場合があります。
- 計算の要求: より高い検出精度を実現するモデルは、多くの場合、トレーニング中およびリアルタイムのデプロイ中に、多大な処理能力を必要とします。これは通常、高性能GPUを使用することを意味し、インフラコストを増加させる可能性があります。
- 実世界条件への感度: 照明、カメラアングル、天気、混雑したシーンの変動は、検出パフォーマンスに影響を与える可能性があり、継続的なテストとチューニングが必要になります。
Link to this section重要なポイント#
コンピュータビジョンプロジェクトに最適な物体検出モデルは、ユースケース、データセットアップ、パフォーマンス要件、ハードウェアの制約によって異なります。一部のモデルは速度に最適化されており、他のモデルは精度に重点を置いていますが、ほとんどの実世界のアプリケーションではその両方のバランスが必要です。GitHub上のオープンソースフレームワークと活発なコミュニティのおかげで、これらのモデルは実践的な使用のために評価、適応、デプロイが容易になっています。
詳細については、GitHubリポジトリをご覧ください。コミュニティに参加し、ソリューションページをチェックして、AI in healthcareやcomputer vision in the automotive業界などのアプリケーションについてお読みください。ビジョンAIを今すぐ始めるには、ライセンスオプションをご確認ください。






