Améliorer la réidentification de véhicules avec les modèles Ultralytics YOLO
Apprends comment les modèles Ultralytics YOLO peuvent jouer un rôle dans les solutions de réidentification de véhicules en fournissant des détections précises et fiables.

Lorsque tu regardes une course de Formule 1, il est facile de repérer la voiture de ton équipe préférée. Le rouge éclatant de Ferrari ou l'argenté de Mercedes ressortent tour après tour.
Demander à une machine de faire de même, non pas sur un circuit propre mais dans des rues bondées, est bien plus difficile. C'est pourquoi la ré-identification de véhicules (re-ID de véhicules) gagne récemment en importance dans le domaine de l'IA.
La ré-identification de véhicules donne aux machines la capacité de reconnaître le même véhicule à travers plusieurs caméras ou des caméras sans chevauchement. Elle vise également à identifier les véhicules après une occlusion temporaire (lorsqu'un véhicule est partiellement caché) ou des changements de luminosité et d'angle de vue.
Une technologie fondamentale alimentant la re-ID de véhicules est la vision par ordinateur. La vision par ordinateur est un sous-domaine de l'intelligence artificielle qui se concentre sur l'apprentissage des machines pour comprendre et interpréter des informations visuelles, comme des images et des vidéos. En utilisant cette technologie, les systèmes d'IA peuvent analyser les caractéristiques des véhicules et les suivre de manière fiable à travers de grands réseaux de caméras pour des applications telles que la surveillance urbaine et le suivi du trafic.
En particulier, les modèles de Vision AI comme Ultralytics YOLO11 et le futur Ultralytics YOLO26 prennent en charge des tâches comme la détection et le suivi d'objets. Ils peuvent rapidement localiser les véhicules dans chaque image et suivre leur mouvement à travers une scène. Lorsque ces modèles sont combinés avec des réseaux de ré-identification de véhicules, le système global peut reconnaître le même véhicule à travers différents flux de caméra, même lorsque les vues ou les conditions d'éclairage changent.
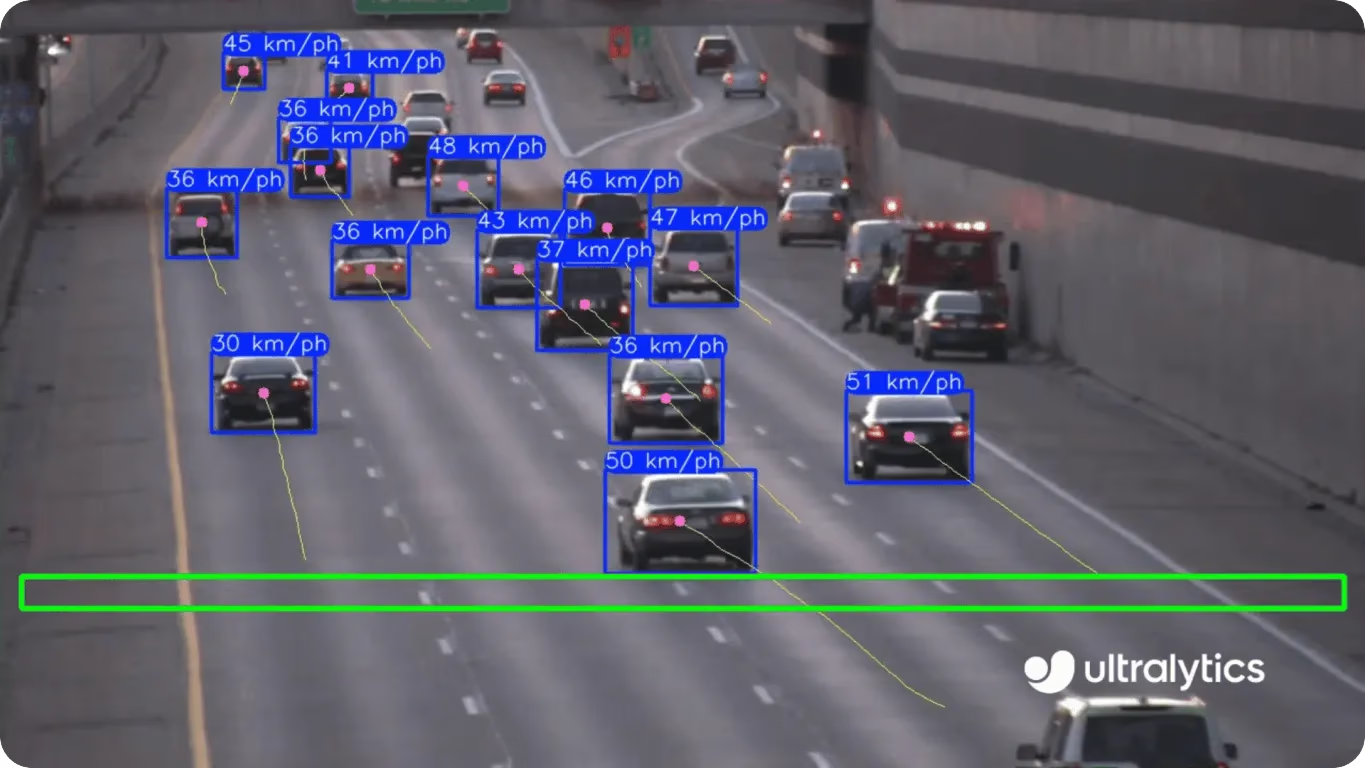
Fig 1. Un exemple d'utilisation de YOLO11 pour le suivi de véhicules et l'estimation de vitesse (Source)
Dans cet article, nous examinons comment fonctionne la ré-identification de véhicules, la technologie qui la rend possible, et où elle est utilisée dans les systèmes de transport intelligents. Commençons !
Link to this sectionQu'est-ce que la ré-identification de véhicules ?#
La ré-identification de véhicules est une application importante en vision par ordinateur. Elle se concentre sur la reconnaissance du même véhicule tel qu'il apparaît à travers différentes caméras sans chevauchement, en maintenant son identité constante à mesure qu'il se déplace dans une ville. C'est un défi car chaque caméra peut capturer le véhicule sous un angle différent, sous un éclairage varié ou avec une occlusion partielle.
Considère un scénario où une berline bleue traverse une intersection et apparaît plus tard dans une autre rue, surveillée par une autre caméra. L'angle, l'éclairage et l'arrière-plan ont tous changé, et d'autres voitures peuvent bloquer brièvement la vue. Malgré cela, le système de re-ID de véhicules doit encore déterminer qu'il s'agit du même véhicule.
Les progrès récents en apprentissage profond, notamment avec les réseaux de neurones convolutifs (CNNs) et les modèles basés sur les Transformers, ont rendu ce processus bien plus précis. Ces modèles peuvent extraire des motifs visuels significatifs et distinguer des véhicules qui se ressemblent tout en identifiant le bon.
Dans les systèmes de transport intelligents, cette capacité permet une surveillance continue, la reconstruction d'itinéraires et l'analyse du trafic à l'échelle de la ville, donnant aux systèmes de villes intelligentes une image plus claire de la façon dont les véhicules se déplacent. Ils aident à améliorer la sécurité et l'efficacité.
Link to this sectionComprendre comment fonctionne la ré-identification de véhicules#
Généralement, les séquences vidéo provenant d'intersections, de zones de stationnement et d'autoroutes sont analysées en utilisant des techniques de ré-identification de véhicules pour déterminer si le même véhicule apparaît à travers différentes caméras. Ce concept est similaire à la ré-identification de personnes, où les systèmes suivent des individus à travers plusieurs vues, mais ici l'accent est mis sur l'analyse des caractéristiques propres au véhicule au lieu de l'apparence humaine.
Le processus pour y parvenir implique plusieurs étapes clés, chacune conçue pour aider le système à détecter les véhicules, extraire leurs caractéristiques visuelles et les faire correspondre de manière fiable à travers différents angles de vue.
À un haut niveau, le système détecte d'abord les véhicules dans chaque image, puis extrait des caractéristiques telles que la couleur, la forme et la texture pour créer une représentation numérique unique, ou embedding, pour chacun d'eux. Ces embeddings sont comparés à travers le temps et les caméras, souvent soutenus par le suivi d'objets et des vérifications spatio-temporelles, pour décider si deux apparitions appartiennent au même véhicule.
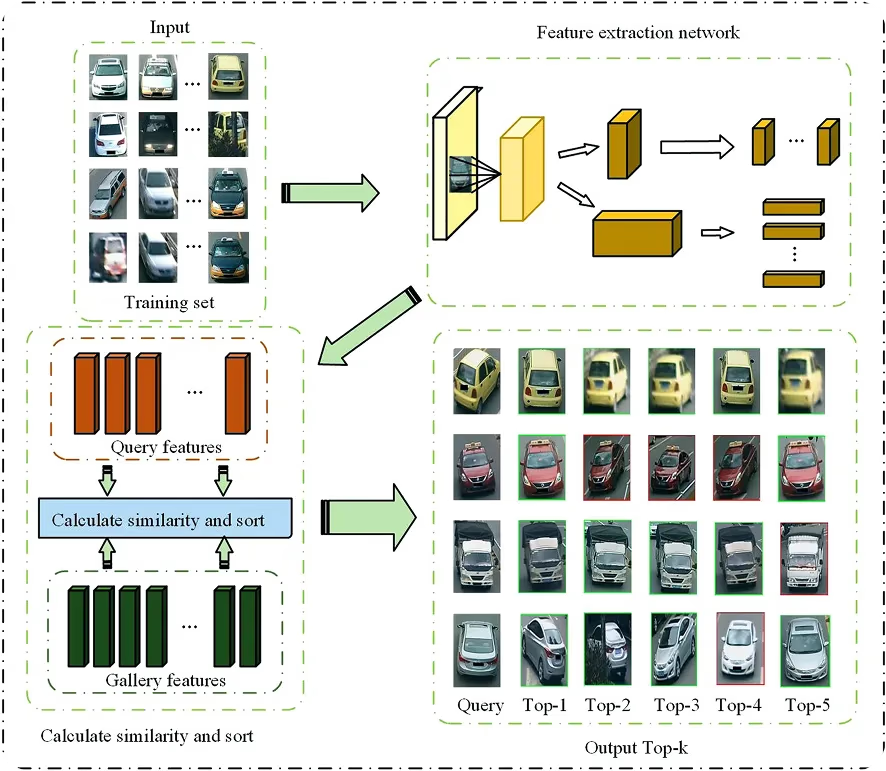
Fig 2. Comment fonctionne la ré-identification de véhicules. (Source)
Voici un examen plus approfondi de ce processus :
- Détection d'objets : Le système identifie et localise d'abord les véhicules dans chaque image vidéo, afin de savoir exactement quelles zones traiter. Cette étape est généralement gérée par des modèles de détection d'objets.
- Extraction de caractéristiques : Après la détection, un réseau dédié à la re-ID ou à l'extraction de caractéristiques analyse chaque recadrage de véhicule et génère des cartes de caractéristiques ou des représentations qui capturent les détails visuels tels que la couleur, la forme, la texture et des parties distinctives.
- Génération d'embedding : Ces caractéristiques extraites sont transformées en une représentation numérique appelée feature embedding. Cet embedding agit comme une empreinte digitale numérique qui capture l'apparence du véhicule sous différents angles. Avant la mise en correspondance, ces embeddings sont généralement normalisés afin que les différences causées par l'éclairage, le contraste ou les paramètres de la caméra n'interfèrent pas avec la comparaison d'identité. La normalisation garantit que le système se concentre sur des caractéristiques significatives liées à l'identité plutôt que sur le bruit.
- Suivi d'objets : Dans une seule vue de caméra, les algorithmes de suivi relient les détections à travers les images, aidant à maintenir une identité cohérente à mesure que le véhicule se déplace dans la scène.
- Mise en correspondance entre caméras : Pour faire correspondre le même véhicule à travers différentes caméras, le système compare les embeddings (générés par le réseau de re-ID) ainsi que les informations de temps et de lieu. Cette étape détermine si deux apparitions appartiennent au même véhicule, même lorsque les caméras ne se chevauchent pas.
Link to this sectionComment les modèles Ultralytics YOLO peuvent soutenir la ré-identification de véhicules#
Les modèles Ultralytics YOLO jouent un rôle de soutien important dans les pipelines de ré-identification de véhicules. Bien qu'ils n'effectuent pas la re-ID par eux-mêmes, ils fournissent d'autres capacités essentielles, comme une détection rapide et un suivi stable, dont les réseaux de re-ID dépendent pour une mise en correspondance précise entre les caméras.
Ensuite, examinons de plus près comment les modèles Ultralytics YOLO comme YOLO11 peuvent améliorer les systèmes de ré-identification de véhicules.
Link to this sectionUn module de détection de véhicules précis : la première partie des systèmes de re-ID#
La base de tout système de ré-identification de véhicules est une détection d'objets précise. Les modèles Ultralytics YOLO comme YOLO11 sont une excellente option pour cela, car ils peuvent détecter rapidement les véhicules dans chaque image, même dans des scènes chargées avec des occlusions partielles, un trafic dense ou des conditions d'éclairage changeantes.
Ils peuvent également être entraînés sur mesure, ce qui signifie que tu peux affiner le modèle sur ton propre jeu de données afin qu'il apprenne à reconnaître des types de véhicules spécifiques, tels que les taxis, les camions de livraison ou les véhicules de flotte. Cela est particulièrement utile lorsqu'une solution nécessite une détection plus spécialisée. En fournissant des boîtes englobantes propres et précises, les modèles Ultralytics YOLO donnent aux réseaux de re-ID des entrées de haute qualité avec lesquelles travailler, ce qui conduit à une mise en correspondance plus fiable entre les caméras.
Link to this sectionSoutenir un suivi fiable avec une seule caméra#
Une fois les véhicules détectés, des modèles comme YOLO11 peuvent également soutenir un suivi d'objets stable au sein d'une seule vue de caméra. Le suivi d'objets est le processus consistant à suivre un véhicule détecté à travers des images consécutives et à lui attribuer un ID cohérent à mesure qu'il se déplace.
Avec un support intégré pour les algorithmes de suivi tels que ByteTrack et BoT-SORT dans le package Python Ultralytics, YOLO11 peut maintenir des ID cohérents à mesure que les véhicules se déplacent dans une scène. Ce suivi stable réduit les changements d'identité avant que le système de re-ID ne prenne le relais, ce qui améliore ultimement la précision de la mise en correspondance entre les caméras.
Link to this sectionRe-ID optionnelle au niveau du tracker pour une meilleure stabilité d'identité#
En plus du suivi basé sur le mouvement standard, le package Python Ultralytics inclut des capacités de re-ID optionnelles basées sur l'apparence au sein de son tracker BoT-SORT. Cela signifie que le tracker peut utiliser des caractéristiques d'apparence visuelle, et pas seulement des modèles de mouvement ou le chevauchement des boîtes englobantes, pour déterminer si deux détections appartiennent au même véhicule.
Lorsqu'elle est activée, BoT-SORT extrait des embeddings d'apparence légers du détecteur ou d'un modèle de classification YOLO11 et les utilise pour vérifier l'identité entre les images. Cet indice d'apparence supplémentaire aide le tracker à maintenir des ID plus stables dans des situations difficiles, telles que des occlusions brèves, des véhicules passant près les uns des autres ou de petits déplacements causés par le mouvement de la caméra.
Bien que cette re-ID intégrée ne soit pas destinée à remplacer la ré-identification complète de véhicules entre les caméras, elle améliore la cohérence de l'identité au sein d'une seule vue de caméra et produit des pistes plus propres sur lesquelles les modules de re-ID en aval peuvent s'appuyer. Pour utiliser ces fonctionnalités de suivi basées sur l'apparence, tu actives simplement la re-ID dans un fichier de configuration du tracker BoT-SORT en réglant “with_reid” sur “True” et en sélectionnant le modèle qui fournira les caractéristiques d'apparence.
Pour plus de détails, tu peux consulter la page de documentation Ultralytics sur le suivi d'objets, qui explique les options de re-ID disponibles et comment les configurer.
Link to this sectionFournir des entrées de haute qualité aux réseaux de re-ID#
Au-delà de l'amélioration de la stabilité de l'identité pendant le suivi, les modèles YOLO jouent également un rôle important dans la préparation d'entrées visuelles propres pour le réseau de re-ID lui-même.
Après qu'un véhicule est détecté, sa boîte englobante est généralement recadrée et envoyée à un réseau de ré-identification, qui extrait les caractéristiques visuelles nécessaires à la mise en correspondance. Parce que les modèles de re-ID s'appuient fortement sur ces images recadrées, des entrées médiocres, telles que des recadrages flous, mal alignés ou incomplets, peuvent mener à des embeddings plus faibles et une mise en correspondance entre les caméras moins fiable.
Les modèles Ultralytics YOLO aident à réduire ces problèmes en produisant systématiquement des boîtes englobantes propres et bien alignées qui capturent entièrement le véhicule d'intérêt. Avec des recadrages plus clairs et plus précis, le réseau de re-ID peut se concentrer sur des détails significatifs comme la couleur, la forme, la texture et d'autres caractéristiques distinctives. Des entrées de haute qualité conduisent à une performance de re-ID plus fiable et précise à travers les vues des caméras.
Link to this sectionActiver la mise en correspondance entre caméras lorsqu'elle est combinée avec un modèle de re-ID#
Bien que les modèles Ultralytics YOLO n'effectuent pas de ré-identification par eux-mêmes, ils fournissent les informations critiques dont un réseau de re-ID a besoin pour comparer les véhicules à travers différentes vues de caméra. Des modèles comme YOLO11 peuvent se charger de localiser et de suivre les véhicules dans chaque caméra, tandis que le modèle de re-ID détermine si deux recadrages de véhicules provenant d'endroits différents appartiennent à la même identité.
Lorsque ces composants travaillent ensemble, YOLO pour la détection et le suivi, et un modèle d'embedding dédié pour l'extraction de caractéristiques, ils forment un pipeline complet de mise en correspondance de véhicules multi-caméras. Cela rend possible l'association du même véhicule à mesure qu'il se déplace à travers un réseau de caméras plus large.
Par exemple, dans une étude récente, des chercheurs ont utilisé un modèle YOLO11 léger comme détecteur de véhicules dans un système de suivi multi-caméras en ligne. L'étude a révélé que l'utilisation de YOLO11 a aidé à réduire le temps de détection sans sacrifier la précision, ce qui a amélioré la performance globale du suivi en aval et de la mise en correspondance entre les caméras.

Fig 3. Suivi et ré-identification multi-véhicules basés sur YOLO11 à travers plusieurs caméras. (Source)
Link to this sectionArchitectures basées sur l'apprentissage profond pour la re-ID de véhicules#
Maintenant que nous avons une meilleure compréhension de la façon dont les modèles Ultralytics YOLO peuvent soutenir la ré-identification de véhicules, examinons de plus près les modèles d'apprentissage profond qui gèrent les étapes d'extraction de caractéristiques et de mise en correspondance. Ces modèles sont responsables de l'apprentissage de l'apparence des véhicules, de la création d'embeddings robustes et de la distinction entre des véhicules visuellement similaires à travers différentes vues de caméra.
Voici quelques exemples des composants d'apprentissage profond de base utilisés dans les systèmes de ré-identification d'objets :
-
Extraction de caractéristiques avec des CNN : Les réseaux de neurones convolutifs tels que ResNet50 ou ResNet101 apprennent des caractéristiques profondes par la reconnaissance de motifs, identifiant des éléments comme la couleur, la forme et la texture qui différencient un véhicule d'un autre. Ces motifs appris sont ensuite convertis en embeddings qui agissent comme la représentation numérique unique du véhicule.
-
Mécanismes d'attention et Transformers : Les réseaux et couches d'attention, y compris l'attention spatiale, peuvent aider à mettre en évidence des régions importantes d'un véhicule, telles que les phares, les fenêtres ou les zones de plaque d'immatriculation. L'attention spatiale concentre le modèle là où les indices visuels les plus informatifs sont situés, tandis que les modèles basés sur des Transformers comme les Vision Transformers (ViT) capturent les relations globales à travers toute l'image. Ensemble, ils améliorent la précision fine lorsque les véhicules se ressemblent beaucoup.
-
Réseaux basés sur des parties et multi-branches : Certains modèles de re-ID analysent des régions spécifiques du véhicule séparément, comme le toit, les feux arrière ou les panneaux latéraux, puis combinent les résultats. Cela signifie que le système reste robuste même lorsque les véhicules sont partiellement obstrués ou vus sous des angles difficiles.
En plus de ces composants architecturaux, l'apprentissage métrique joue un rôle clé dans l'entraînement des modèles de re-ID de véhicules. Les fonctions de perte comme la perte triplet, la perte contrastive et la perte d'entropie croisée aident le système à apprendre des embeddings forts et discriminants en rapprochant les images du même véhicule tout en éloignant celles des différents véhicules.
Link to this sectionJeux de données et benchmarks populaires de ré-identification de véhicules#
Dans la recherche en vision par ordinateur, la qualité d'un jeu de données a un impact majeur sur la performance d'un modèle une fois déployé. Un jeu de données fournit les images ou vidéos étiquetées à partir desquelles un modèle apprend.
Pour la ré-identification de véhicules, ces jeux de données de pointe doivent capturer des conditions diverses telles que l'éclairage, les changements d'angle de vue et les variations météorologiques. Cette diversité aide les modèles à gérer la complexité des environnements de transport réels.
Voici un aperçu des jeux de données populaires qui soutiennent l'entraînement, l'optimisation et l'évaluation des modèles de ré-identification de véhicules :
- Jeu de données VeRi-776 : Il s'agit d'une collection de plus de 50 000 images de véhicules annotées capturées depuis 20 caméras urbaines. Les annotations incluent l'ID du véhicule, la couleur, le modèle et les zones de plaque d'immatriculation, permettant un apprentissage détaillé des caractéristiques.
- Jeu de données VehicleID : Ce jeu de données à grande échelle contient plus de 200 000 images représentant plus de 26 000 véhicules. Il est souvent choisi pour étudier l'évolutivité et pour effectuer des comparaisons de base entre différentes méthodes.
- Jeu de données VeRi-Wild : Il est conçu pour refléter la variabilité du monde réel, y compris les différences d'angle de vue, de météo et d'occlusion partielle. Il est couramment utilisé pour évaluer la robustesse et la généralisation du modèle.

Fig 4. Exemple de véhicules dans le jeu de données VeRi-776. (Source)
La performance du modèle sur ces jeux de données est généralement évaluée à l'aide de mesures comme la précision moyenne (mAP) et la précision Rank-1 ou Rank-5. La mAP mesure avec quelle précision le modèle récupère toutes les correspondances pertinentes pour un véhicule donné, tandis que les scores Rank-1 et Rank-5 indiquent si la bonne correspondance apparaît en haut de la liste des résultats ou parmi les premières prédictions.
Ensemble, ces benchmarks donnent aux chercheurs un moyen cohérent de comparer différentes approches et jouent un rôle important pour guider le développement de systèmes de ré-identification de véhicules plus précis et fiables pour une utilisation réelle.
Link to this sectionApplications de la ré-identification de véhicules#
Maintenant que nous avons couvert les principes fondamentaux, parcourons quelques cas d'utilisation réels où la ré-identification de véhicules soutient des flux de travail pratiques de transport, de mobilité et de surveillance.
Link to this sectionSurveillance et suivi du trafic urbain#
Les routes urbaines animées sont constamment remplies de mouvement, et les caméras de trafic peinent souvent à suivre le même véhicule lorsqu'il se déplace entre différentes zones. Les changements d'éclairage, les scènes bondées et les véhicules qui se ressemblent presque parfaitement peuvent entraîner la perte d'identités à travers les caméras.
La ré-identification de véhicules résout ce problème en détectant les véhicules clairement, en extrayant des caractéristiques distinctives et en maintenant des ID cohérents même dans des séquences à faible résolution ou chargées. Le résultat est un suivi continu et plus fluide à travers le réseau, donnant aux équipes de trafic une image plus claire de la façon dont les véhicules se déplacent dans la ville et permettant des réponses plus rapides et informées à la congestion et aux incidents.
Link to this sectionSystèmes de stationnement intelligents#
Les installations de stationnement intelligentes s'appuient sur une identification cohérente des véhicules pour gérer l'entrée, la sortie, le contrôle d'accès et l'allocation des espaces. Cependant, les caméras dans ces environnements capturent souvent les véhicules sous des angles inhabituels et dans des conditions d'éclairage difficiles, comme dans les garages souterrains, les zones ombragées ou les parkings extérieurs à la tombée de la nuit.
Ces conditions rendent plus difficile la confirmation si le même véhicule est vu à travers différentes zones. Lorsque les identités sont incohérentes, les dossiers de stationnement peuvent être rompus, le contrôle d'accès devient moins fiable et les conducteurs peuvent subir des retards. C'est pourquoi de nombreux systèmes de stationnement intelligents intègrent des modèles de ré-identification de véhicules pour maintenir une identité stable pour chaque véhicule à mesure qu'il se déplace dans l'installation.
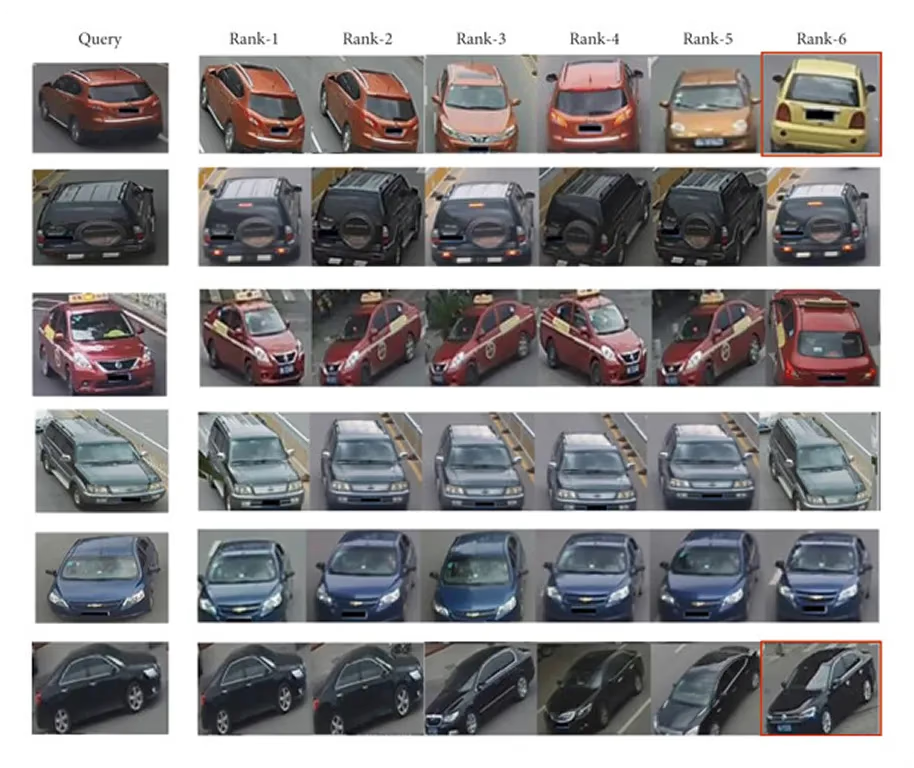
Fig 5. Un exemple de ré-identification de véhicules montrant l'image du véhicule sélectionné à gauche et les résultats de recherche correspondants à droite. (Source)
Link to this sectionApplication de la loi et médecine légale#
S'appuyant sur le suivi du trafic, la ré-identification de véhicules joue également un rôle important dans l'application de la loi et les enquêtes médico-légales. Dans de nombreux cas, les agents doivent suivre un véhicule à travers plusieurs caméras, mais les plaques d'immatriculation peuvent être illisibles, manquantes ou délibérément obscurcies.
Les scènes bondées, la faible visibilité et l'occlusion partielle peuvent rendre différents véhicules trompeusement similaires, rendant l'identification manuelle lente et peu fiable. La ré-identification de véhicules peut être utilisée pour retracer le mouvement d'un véhicule à travers des réseaux de caméras sans chevauchement en analysant ses caractéristiques visuelles plutôt que de dépendre uniquement des plaques d'immatriculation.
Cela signifie que les enquêteurs peuvent plus facilement suivre les mouvements d'un véhicule, comprendre quand il est apparu à différents endroits et confirmer son chemin avant et après un incident. La re-ID de véhicules alimentée par l'IA soutient également des tâches telles que le suivi de véhicules suspects, l'examen des images d'incidents ou la détermination de la direction dans laquelle un véhicule a voyagé avant ou après un événement.
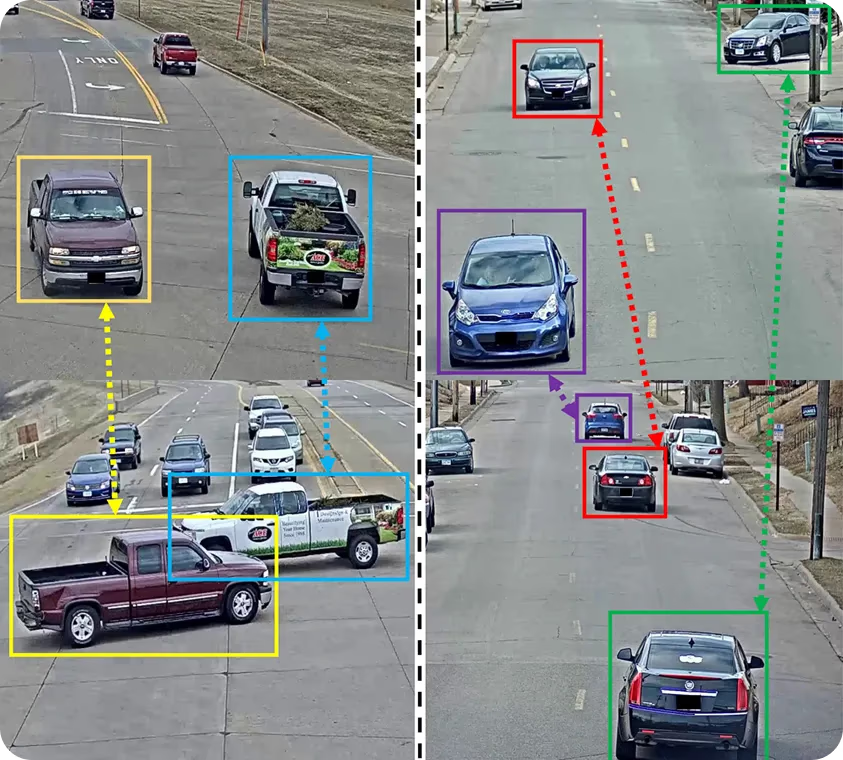
Fig 6. Véhicules mis en correspondance à travers différentes caméras avec des perspectives variées. (Source)
Link to this sectionSuivi de flotte et logistique#
Les opérations de flotte et de logistique s'appuient souvent sur le GPS, les étiquettes RFID et les journaux manuels pour suivre le mouvement des véhicules, mais ces outils laissent des lacunes dans les zones couvertes par des caméras de sécurité ou de chantier, comme les quais de chargement, les cours d'entrepôt et les réseaux routiers internes.
Les véhicules se déplacent fréquemment entre des caméras qui ne se chevauchent pas, disparaissent derrière des structures ou ressemblent presque parfaitement aux autres de la flotte, ce qui rend difficile la confirmation si le même véhicule a été vu à différents endroits. Les systèmes de ré-identification de véhicules peuvent aider à combler ces lacunes en analysant les détails visuels et les informations de temps pour maintenir une identité cohérente pour chaque véhicule à mesure qu'il se déplace dans l'installation.
Cela donne aux gestionnaires de flotte une vue plus complète de l'activité dans leurs centres, soutenant des tâches telles que la vérification des itinéraires de livraison, l'identification de mouvements inhabituels et l'assurance que les véhicules suivent les itinéraires prévus.
Link to this sectionAvantages et inconvénients des tâches de re-ID de véhicules#
Voici quelques-uns des avantages clés de l'utilisation de la ré-identification de véhicules alimentée par l'IA :
- Réduction de la charge de travail manuelle : La re-ID de véhicules automatise les tâches de mise en correspondance d'identité qui nécessiteraient autrement une révision manuelle approfondie, réduisant considérablement le temps et les efforts nécessaires pour analyser les séquences vidéo.
- Automatisation et perspectives en temps réel : En combinant la détection, le suivi et la mise en correspondance de caractéristiques, la re-ID de véhicules soutient une surveillance automatisée continue et peut fournir des alertes en temps réel pour une réponse aux incidents plus rapide.
- Évolutivité et adaptabilité : Les modèles de re-ID peuvent s'adapter à de nouveaux environnements, conditions d'éclairage ou angles de caméra grâce à un apprentissage robuste des caractéristiques, une extraction de caractéristiques multi-échelle et des représentations invariantes qui restent stables sous des changements visuels. Ces capacités les rendent adaptés à la fois aux grands réseaux urbains et aux déploiements plus petits.
Bien que la ré-identification de véhicules offre de nombreux avantages, il existe également certaines limites à prendre en compte. Voici quelques facteurs qui affectent sa fiabilité dans les environnements réels :
- Demande de calcul élevée : L'extraction de caractéristiques, la génération d'embeddings et la mise en correspondance entre caméras nécessitent une puissance de traitement importante, surtout lors de la surveillance de grands réseaux de caméras.
- Variabilité environnementale : Des facteurs tels que l'éclairage nocturne, les changements météorologiques, les ombres et les occlusions peuvent dégrader la capacité du modèle à maintenir des identités cohérentes à travers les scènes.
- Limites des jeux de données et du domaine : Les modèles entraînés sur des jeux de données limités ou idéalisés peuvent ne pas bien se généraliser aux conditions réelles sans un affinement ou une adaptation au domaine supplémentaire.
Link to this sectionLa voie à suivre pour les méthodes de ré-identification de véhicules#
La ré-identification de véhicules continue d'avancer à mesure que la technologie évolue. Des publications récentes de l'IEEE, de la CVPR et d'arXiv, ainsi que des présentations lors de conférences internationales, mettent en évidence un changement clair vers des modèles plus riches qui combinent plusieurs sources de données et un raisonnement de caractéristiques plus avancé. Les travaux futurs dans ce domaine se concentreront probablement sur la construction de systèmes plus robustes, efficaces et capables de gérer la variabilité du monde réel à grande échelle.
Par exemple, une orientation prometteuse est l'utilisation de modèles basés sur des Transformers et de réseaux d'agrégation de graphes. Les Transformers peuvent analyser une image entière et comprendre comment tous les détails visuels s'assemblent, ce qui aide le système à reconnaître le même véhicule même lorsque l'angle ou l'éclairage change.
Les modèles basés sur des graphes vont encore plus loin en traitant différentes parties de véhicules ou vues de caméras comme des points connectés au sein d'un réseau. Cela permet au système de comprendre la corrélation entre ces points clés et de prendre de meilleures décisions concernant l'identité des véhicules et leurs caractéristiques distinctives.
Une autre avancée majeure est la fusion de données multi-modales et la fusion de caractéristiques. Au lieu de s'appuyer uniquement sur des images, les systèmes plus récents combinent des informations visuelles avec d'autres signaux multimédias, tels que des données GPS ou des modèles de mouvement issus de capteurs. Ce contexte supplémentaire permet au système de rester plus précis lorsque les véhicules sont partiellement masqués, lorsque l'éclairage est médiocre ou lorsque les angles de caméra changent soudainement.
Link to this sectionPoints clés#
La réidentification de véhicules devient une méthodologie clé dans les systèmes de transport intelligents, aidant les villes à suivre les véhicules de manière plus fiable à travers différentes caméras. Grâce aux progrès du deep learning et à une meilleure validation utilisant des jeux de données plus riches et plus diversifiés, ces systèmes deviennent de plus en plus précis et pratiques dans des conditions réelles.
À mesure que la technologie évolue, il est important d'équilibrer l'innovation avec des pratiques responsables en matière de confidentialité, de sécurité et d'éthique. Dans l'ensemble, ces avancées ouvrent la voie à des réseaux de transport plus intelligents, plus sûrs et plus efficaces.
Explore davantage sur l'IA en visitant notre dépôt GitHub et en rejoignant notre communauté. Consulte nos pages de solutions pour en savoir plus sur l'IA en robotique et la vision par ordinateur dans la fabrication. Découvre nos options de licence pour te lancer dès aujourd'hui avec l'IA visuelle !






