Détection vidéo du trafic nocturne : pourquoi la précision est essentielle
D'une mauvaise visibilité à l'éblouissement, apprends ce qui rend la détection vidéo du trafic nocturne difficile, et comment la vision par ordinateur améliore la sécurité et la fluidité.

Les routes paraissent différentes dans l'obscurité, non seulement pour les conducteurs, mais aussi pour les systèmes chargés de garantir leur sécurité. Une faible visibilité, l'éblouissement des phares et les reflets rapides peuvent rendre la détection des véhicules de nuit plus complexe.
Les méthodes traditionnelles, comme l'observation manuelle ou les caméras basées sur le mouvement, reposent principalement sur le jugement humain et des indices de mouvement simples. Cela peut être peu fiable dans des conditions de faible luminosité ou de trafic complexe. Ces méthodes peuvent mal identifier des véhicules ou des piétons, entraînant des détections erronées ou des observations manquées.

Fig 1. Exemple d'une route mal éclairée la nuit (Source)
L'intelligence artificielle (IA), l'apprentissage profond et la computer vision peuvent combler ce fossé en automatisant la détection et la reconnaissance des véhicules. En particulier, la vision par ordinateur est une branche de l'IA qui permet aux machines de voir et d'interpréter des données visuelles. Lorsqu'il s'agit de la détection vidéo du trafic de nuit, les modèles de vision par IA peuvent aller au-delà de la luminosité ou du mouvement, en apprenant à reconnaître des modèles complexes qui améliorent la précision.
Par exemple, les modèles de vision par ordinateur comme Ultralytics YOLO26 et Ultralytics YOLO11 sont reconnus pour leur vitesse et leur précision. Ils peuvent traiter des données vidéo et images en temps réel, détectant et classant plusieurs objets au sein d'une image et les suivant à travers des séquences.
Ces capacités sont rendues possibles par diverses tâches de vision, telles que la détection d'objets et la segmentation d'instances, même lorsque les phares, les ombres ou le chevauchement des véhicules rendent la détection difficile. Elles permettent au modèle d'identifier, de classer et de différencier les objets.
Dans cet article, nous explorerons les défis de la surveillance du trafic de nuit, verrons comment la vision par ordinateur y répond, et où l'IA de vision est appliquée dans les systèmes de surveillance du trafic réels. Commençons !
Link to this sectionDéfis de la détection nocturne#
Avant d'explorer comment la vision par ordinateur résout les défis de la détection du trafic de nuit, examinons pourquoi repérer les véhicules après la tombée de la nuit est si difficile. Voici quelques facteurs à prendre en compte :
-
Faible visibilité : Un éclairage limité et de mauvaises conditions d'illumination rendent difficile la capture d'images nettes et détaillées par les caméras. Avec une qualité d'image réduite, les véhicules peuvent se fondre dans l'arrière-plan ou être totalement mal identifiés.
-
Conditions météorologiques : La pluie, le brouillard, la brume ou même la poussière peuvent encore dégrader la qualité vidéo. Ces conditions rendent plus complexe la distinction des véhicules de leur environnement par les systèmes de détection.
-
Phares et feux arrière : Les faisceaux lumineux et les reflets peuvent submerger les caméras. Cela peut créer de fausses détections de véhicules, où des points lumineux sont pris pour des véhicules, confondant les algorithmes de détection et réduisant la précision.
-
Occlusion des véhicules : Dans des conditions de trafic dense, les véhicules peuvent être partiellement ou entièrement cachés par d'autres. L'occlusion complique le suivi, le comptage et la classification des véhicules, surtout lorsque plusieurs usagers de la route se chevauchent dans une seule image.
Link to this sectionLe besoin de jeux de données et de métriques de référence nocturnes#
Les computer vision models sont entraînés à l'aide de grandes collections d'images appelées jeux de données. Ces jeux de données sont soigneusement étiquetés avec les objets qu'ils contiennent, tels que des voitures, des camions, des piétons et des vélos, et servent de base à l'entraînement. En étudiant ces exemples étiquetés, le modèle apprend à reconnaître des modèles, ce qui lui permet d'identifier et de détecter des objets dans de nouvelles séquences vidéo.

Fig 2. Utilisation de la vision par ordinateur pour détecter les véhicules et les piétons dans le trafic (Source)
Pendant l'entraînement, le modèle extrait des caractéristiques des données et les utilise pour améliorer la précision de la détection. Ce processus aide à réduire les détections manquées et les fausses alertes lorsque le modèle est confronté à des scènes de trafic réelles.
Construire des datasets ou des collections de données pour les conditions nocturnes est cependant beaucoup plus difficile. La faible qualité vidéo rend l'étiquetage long et sujet aux erreurs. De plus, des événements rares mais importants, comme des accidents ou des comportements de conduite inhabituels, peuvent être difficiles à capturer dans des environnements nocturnes. Cela se traduit par un nombre limité d'exemples d'entraînement sur lesquels les modèles peuvent apprendre.
Pour résoudre ce problème, les chercheurs ont développé des jeux de données de référence spécialisés. Un jeu de données de référence est bien plus qu'une simple collection d'images. Il inclut des étiquettes standardisées, des protocoles d'évaluation et des métriques de performance telles que la précision, le rappel et la moyenne de précision moyenne (mAP). Ces métriques permettent de tester et de comparer différents algorithmes dans les mêmes conditions, garantissant une évaluation juste et cohérente.
Par exemple, le jeu de données de référence ExDark contient 7 363 images à faible luminosité réparties dans 12 catégories d'objets (vélo, bateau, bouteille, bus, voiture, chat, chaise, tasse, chien, moto, personnes, table). Chaque image est annotée avec des boîtes englobantes, et le jeu de données est largement utilisé dans la recherche pour évaluer la détection et la classification d'objets en cas de faible éclairage.
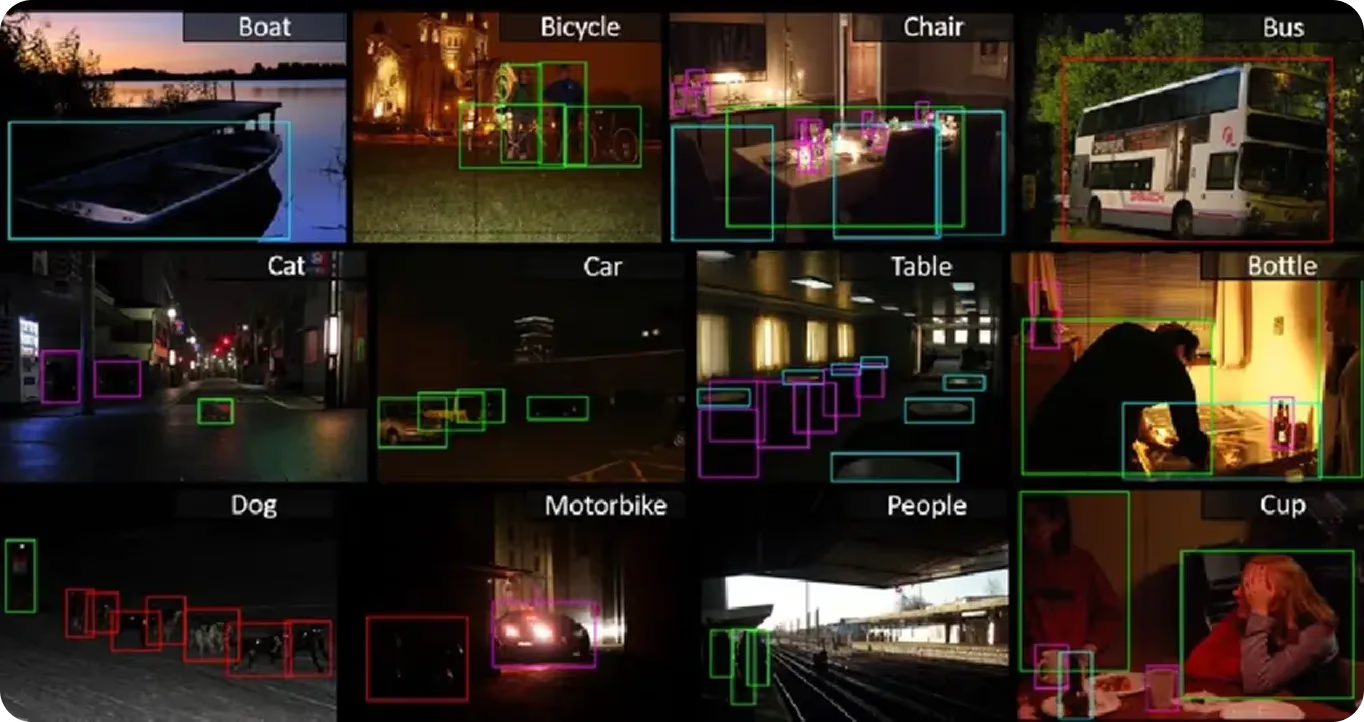
Fig 3. Un aperçu du jeu de données ExDark (Source)
De même, le jeu de données de référence NightOwls fournit environ 115 000 images nocturnes avec environ 279 000 annotations de piétons. Il est devenu une ressource clé pour évaluer les systèmes de détection de piétons, qui jouent un rôle vital dans la sécurité routière et les systèmes avancés d'aide à la conduite (ADAS).
Link to this sectionComment la vision par ordinateur aide à la détection vidéo du trafic de nuit#
Maintenant que nous comprenons mieux les défis impliqués et le besoin de jeux de données, examinons de plus près comment les systèmes basés sur la vision peuvent interpréter les vidéos de trafic nocturne.
Les modèles comme YOLO11 et YOLO26 prennent en charge des computer vision tasks tels que la détection d'objets, le suivi et la segmentation d'instances, qui permettent d'analyser le trafic même dans des conditions de faible luminosité. Voici un aperçu des tâches de vision par IA que ces modèles prennent en charge pour l'analyse du trafic nocturne :
- Object detection : Cette tâche peut être utilisée pour identifier et localiser les véhicules, les piétons, les vélos et autres usagers de la route dans chaque image, généralement en dessinant des boîtes englobantes autour d'eux.
- Object tracking : Cela aide à suivre les objets détectés à travers les images, permettant de reconnaître le même véhicule ou piéton au fil du temps, ce qui permet d'estimer la vitesse des véhicules et de surveiller le flux de trafic.
- Instance segmentation : Cela peut distinguer des objets individuels même lorsqu'ils se chevauchent, fournissant des détails au niveau du pixel qui améliorent la précision dans des conditions nocturnes complexes.
- Image classification : Cette tâche assigne une image entière ou un objet détecté à une catégorie prédéfinie, telle que voiture, bus, camion ou moto.
- Oriented bounding box (OBB) detection : Capture l'angle et l'orientation exacts d'un objet, améliorant la précision lorsque les véhicules apparaissent en diagonale ou dans des positions inhabituelles dans le trafic nocturne.
Link to this sectionUtiliser les modèles Ultralytics YOLO pour la surveillance nocturne#
Nous avons discuté de l'entraînement des modèles, du besoin de jeux de données et des tâches prises en charge par des modèles comme YOLO11 et YOLO26. Mais pour tout rassembler, il reste un concept à parcourir : comment ces modèles sont réellement appliqués à la surveillance nocturne.
Dès leur sortie, les modèles Ultralytics YOLO sont disponibles en versions pré-entraînées, ce qui signifie qu'ils ont déjà été entraînés sur de grands jeux de données polyvalents, comme le COCO dataset, qui couvre de nombreux objets quotidiens. Cela donne au modèle une solide capacité de base pour détecter et classer des objets.
Cependant, comme ces jeux de données contiennent très peu d'exemples en faible luminosité ou nocturnes, les modèles pré-entraînés ne sont pas très efficaces pour gérer l'éblouissement, les ombres ou le mauvais contraste. Pour les rendre efficaces pour la détection vidéo du trafic de nuit, ils doivent être affinés sur des jeux de données spécialisés qui reflètent les conditions nocturnes réelles.
Le réglage fin ou custom training implique l'entraînement du modèle sur des images étiquetées supplémentaires capturées dans des conditions de faible luminosité, telles que des véhicules sous l'éblouissement des phares, des piétons sur des passages piétons, ou des intersections encombrées la nuit, afin qu'il apprenne les caractéristiques uniques des scènes nocturnes.
Une fois personnalisé, le modèle peut prendre en charge des tâches comme la détection, le suivi, la segmentation ou la classification avec une bien meilleure précision dans des conditions de faible luminosité. Cela permet aux autorités de transport d'appliquer ces modèles pour des cas d'utilisation pratiques tels que le comptage de véhicules, l'estimation de vitesse, le contrôle adaptatif des signaux et la prévention des accidents la nuit.
Link to this sectionApplications de l'IA de vision pour la détection vidéo du trafic de nuit#
Ensuite, voyons comment la vision par ordinateur peut être adoptée dans les systèmes de trafic nocturne du monde réel.
Link to this sectionLes signaux de trafic intelligents peuvent soutenir la planification des villes intelligentes#
Les intersections urbaines sont parmi les zones les plus difficiles à gérer, surtout la nuit lorsque la visibilité chute et que le flux de trafic devient moins prévisible. Les signaux traditionnels reposent sur des minuteurs fixes qui ne peuvent pas répondre aux changements en temps réel. La recherche montre que cela gaspille non seulement du temps pour les conducteurs, mais entraîne également une fuel consumption and delays inutile.
C'est précisément là que les systèmes de vision par ordinateur peuvent aider à surmonter ce défi. Ces systèmes peuvent surveiller les mouvements des véhicules et détecter le nombre de véhicules en temps réel. Les données sont ensuite injectées dans des systèmes de contrôle de trafic adaptatifs. Cela permet aux signaux de s'ajuster rapidement en réponse aux conditions routières réelles. Ainsi, si une voie est encombrée alors qu'une autre est vide, le timing des signaux peut être ajusté instantanément pour éliminer les goulots d'étranglement.
Link to this sectionPrévention des accidents#
Conduire la nuit est plus risqué que pendant la journée car la visibilité réduite, l'éclairage inégal et l'éblouissement rendent plus difficile pour les conducteurs d'évaluer les distances. En fait, des études montrent que le fatal accident rate par kilomètre la nuit peut être jusqu'à trois fois plus élevé qu'en plein jour.
Les méthodes de surveillance conventionnelles, telles que les caméras de surveillance fixes, les patrouilles routières, les capteurs de présence de véhicules et les systèmes de signaux à temps fixe, fonctionnent de manière réactive et peuvent échouer à détecter des situations dangereuses assez tôt pour les empêcher de se produire.
Les computer vision solutions peuvent gérer cette préoccupation en analysant des flux vidéo en direct et en détectant des modèles inhabituels sur la route ou l'autoroute. En utilisant le suivi d'objets, ces systèmes peuvent surveiller le comportement des véhicules en temps réel et déclencher des alertes lorsque quelque chose semble anormal.
Par exemple, si un véhicule en mouvement change de voie, se déplace trop rapidement dans une zone encombrée ou ralentit soudainement, le système peut le signaler en temps réel. Cela signifie que les autorités peuvent réagir rapidement et prévenir les accidents avant qu'ils ne surviennent.
Link to this sectionConduite autonome et ADAS#
Pour les véhicules autonomes et les ADAS, la conduite nocturne apporte ses propres défis. La faible visibilité et les modèles de trafic imprévisibles rendent plus difficile pour les capteurs traditionnels d'être performants de manière fiable, ce qui soulève des préoccupations en matière de sécurité.
La vision par ordinateur améliore ces systèmes en traitant des tâches telles que la détection d'objets, le suivi de voie et la segmentation, permettant aux véhicules de reconnaître les piétons, les autres voitures et les obstacles même dans de mauvaises conditions d'éclairage. Lorsqu'elle est combinée avec le radar ou le LiDAR (Light Detection and Ranging), qui cartographient les environs en 3D, la couche visuelle ajoutée aide les ADAS à fournir des avertissements précoces et donne aux véhicules autonomes la conscience dont ils ont besoin pour naviguer plus sûrement la nuit.

Fig 4. Images de véhicules capturées dans des conditions de jour et de nuit (Source)
Link to this sectionApplication de la loi et détection des violations#
Le speeding est responsable d'un décès sur trois sur la route dans le monde, et le risque ne fait qu'augmenter la nuit. L'obscurité rend plus difficile pour la police de la route d'attraper les violations, car les détails qui sont clairs à la lumière du jour sont souvent flous après la tombée de la nuit.
C'est pourquoi les infractions comme les excès de vitesse sur des routes vides, le non-respect des feux rouges ou le changement de voie incorrect passent souvent impunies. La vision par ordinateur s'attaque à ce problème en utilisant des caméras infrarouges pour repérer les violations même dans des conditions de faible luminosité. Ces systèmes créent des zones de détection où les incidents sont enregistrés, réduisant les faux positifs et fournissant des preuves claires et vérifiables. Pour les autorités de transport, cela signifie moins d'angles morts et moins de dépendance aux vérifications manuelles.
Link to this sectionAvantages et inconvénients de la détection vidéo du trafic de nuit#
Voici quelques avantages de l'utilisation de l'IA de vision pour la détection vidéo du trafic de nuit.
- Scalabilité : Une fois affinés, les modèles peuvent être déployés sur de nombreuses caméras ou intersections, soutenant une surveillance à l'échelle de la ville.
- Analyse prédictive : Les données vidéo historiques peuvent être utilisées pour prévoir les zones d'encombrement et sujettes aux accidents, soutenant des mesures préventives.
- Optimisation des ressources : Cela fournit aux autorités des informations en temps réel qui aident à allouer les patrouilles routières et les services d'urgence plus efficacement.
Malgré ses avantages, la détection nocturne du trafic utilisant l'IA de vision comporte aussi certaines limites. Voici quelques facteurs à garder à l'esprit :
-
Dépendance aux données : La précision des systèmes d'IA de vision repose fortement sur l'accès à de grands high-quality datasets qui capturent une large gamme de conditions nocturnes.
-
Défis environnementaux : Les facteurs météorologiques tels que la pluie, le brouillard ou la brume, ainsi que des problèmes pratiques comme des objectifs de caméra sales ou mal alignés, peuvent réduire les performances de détection et nécessitent un entretien régulier.
-
Exigences matérielles : Faire fonctionner des modèles d'IA avancés exige souvent des GPU haute performance ou des appareils de pointe spécialisés, ce qui peut rendre le déploiement à grande échelle coûteux et complexe.
Link to this sectionLa voie à suivre pour les systèmes de transport intelligents la nuit#
À mesure que les villes grandissent et que les routes deviennent plus occupées, la détection du trafic de nuit se tourne vers des systèmes plus intelligents et réactifs. Par exemple, les caméras thermiques et les capteurs infrarouges peuvent détecter les signatures thermiques des personnes et des véhicules, rendant possible la vision même dans l'obscurité totale. Cela réduit les erreurs qui se produisent lorsque les caméras standard luttent avec l'éblouissement ou la faible luminosité.

Fig 5. La technologie de vision nocturne améliore la détection des piétons la nuit (Source)
Une autre approche en pleine croissance est la camera-LiDAR fusion. Les caméras fournissent des images détaillées de la route, tandis que le LiDAR génère une carte 3D précise. Utilisés ensemble, ils améliorent la précision de la détection des voies, des véhicules et des obstacles, particulièrement en faible luminosité ou en brouillard modéré.
Dans le même temps, les avancées dans l'amélioration des images en faible luminosité, la reconnaissance des piétons et l'identification des plaques d'immatriculation étendent les capacités de la vision par ordinateur. Avec ces améliorations, même les routes et intersections mal éclairées peuvent être surveillées avec une plus grande fiabilité et moins d'erreurs.
Link to this sectionPoints clés#
Détecter les véhicules la nuit a toujours été un défi pour la surveillance du trafic, mais la vision par ordinateur le rend plus gérable. En réduisant l'impact de l'éblouissement et en gérant des scènes de trafic complexes, elle fournit une image plus précise de la façon dont les routes se comportent après la tombée de la nuit. À mesure que ces systèmes continuent d'avancer, ils ouvrent la voie à un transport plus sûr, plus intelligent et plus efficace la nuit.
Prêt à intégrer l'IA de vision dans vos projets ? Rejoignez notre community active et découvrez des innovations comme l'AI in the automotive et la vision AI in robotics. Visitez notre GitHub repository pour en découvrir davantage. Pour commencer avec la vision par ordinateur aujourd'hui, consultez nos licensing options.






