小さなオブジェクトに対するモデルのmAPを向上させる方法:クイックガイド
データ品質、オーギュメンテーション、トレーニング戦略、評価、デプロイに関する実践的なヒントを通じて、小さなオブジェクトに対するモデルのmAPを向上させる方法を学びましょう。
人工知能(AI)、機械学習、およびコンピュータビジョンの導入が拡大し続ける中、物体検出システムはスマート交通カメラからドローン、小売分析ツールまで、あらゆる場所で使用されています。多くの場合、これらのシステムは、カメラに近い大型トラックから遠く離れた小さな歩行者まで、あらゆるサイズの物体を検出することが期待されています。
一般的に、大きくて目立つ物体を見つけることは比較的簡単です。対照的に、小さな物体の検出はより困難です。
物体が画像のごく一部しか占めていない場合、作業に使える視覚情報はほとんどありません。交通監視映像の遠くの歩行者や、空撮で捉えられた小型車両などは数ピクセルしか含まれていない可能性がありますが、そのピクセルが重要な情報を持っている場合もあります。
コンピュータビジョンモデル(Ultralytics YOLOモデルなど)は、物体を認識するために視覚的パターンに依存しており、そのパターンが制限されていたり不明瞭だったりすると、パフォーマンスが低下します。処理中に重要な詳細が失われる可能性があり、予測が位置特定エラーに対してより敏感になります。バウンディングボックスがわずかにずれるだけで、正しい検出が検出漏れになってしまうこともあります。
このギャップは、モデルのパフォーマンスを見ると明らかになります。ほとんどの検出およびセグメンテーションモデルは中型や大型の物体をうまく処理しますが、小さな物体は全体的な精度を低下させることがよくあります。
ディープラーニングのパフォーマンスは、一般的にmean average precision(mAP)を使用して測定されます。このメトリクスは、検出の精度と、予測されたボックスが実際の物体とどれだけ一致しているかの両方を反映します。
これは、予測された物体のうちどれだけが正しいかを示す「適合率(precision)」と、実際の物体のうちどれだけが正常に検出されたかを示す「再現率(recall)」を、さまざまな信頼度レベルやIntersection over Union(IoU、予測されたバウンディングボックスがグランドトゥルースボックスとどの程度重なっているかを測定するメトリクス)のしきい値にわたって組み合わせたものです。
以前、私たちは小さな物体の検出について、そしてそれがコンピュータビジョンモデルにとってなぜこれほど難しい問題なのかを調査しました。この記事では、その基盤の上に構築し、小さな物体が含まれる場合にmAPを向上させる方法に焦点を当てます。さあ、始めましょう!
Link to this sectionなぜ小さな物体は検出が難しいのでしょうか?#
物体検出器を使用するアプリケーションに関して、小さな物体とは、人間の目から見てどれだけ小さく見えるかではなく、画像内でどの程度のスペースを占めるかによって定義されます。画像のごく一部しか占めていない場合、そこに含まれる視覚情報は非常に少なく、コンピュータビジョンアルゴリズムで正確に検出することが困難になります。
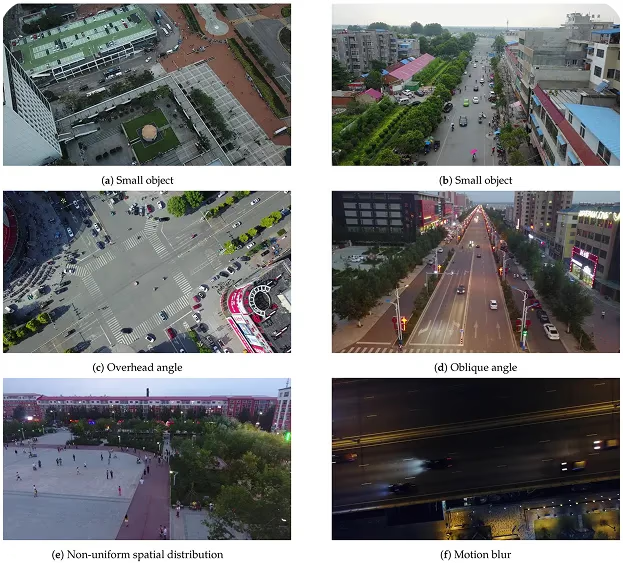
図1:小さな物体が限られたピクセル領域を占めている例を示す画像 (ソース)
処理に使えるピクセル数が少ないため、エッジ、形状、テクスチャなどの重要な詳細が不明瞭になったり、簡単に失われたりします。モデルによって画像が処理される際、便利なパターンを強調するためにリサイズや簡略化が行われます。
これはモデルが全体のシーンを理解するのには役立ちますが、同時に詳細をさらに減少させる可能性があります。小さな物体にとって、それらの詳細は多くの場合、正確な検出に不可欠です。
評価メトリクスを見ると、これらの課題はさらに明らかになります。小さな物体は、位置特定エラーに対して特に敏感です。バウンディングボックスがわずかにずれているだけでも、必要なIntersection over Union(IoU)のしきい値を下回ってしまう可能性があります。
そうなると、妥当に見える予測でも誤りと見なされる可能性があります。これにより適合率と再現率の両方が低下し、最終的にmean average precision(mAP)が低下します。
これらの要因は密接に関連しているため、パフォーマンスを向上させるには、システム全体を考慮する必要があります。つまり、小さな視覚的詳細がより適切に保持および解釈されるように、画像解像度、特徴抽出、モデル設計、および評価設定のバランスを慎重に調整する必要があります。
Link to this sectionデータセットの品質とアノテーションの重要性#
小さな物体の検出に関しては、データセットの品質がパフォーマンスに最も大きな違いをもたらすことがよくあります。小さな物体は画像のごく一部しか占めていないため、モデルが学習するための視覚情報はほとんどありません。このため、トレーニングデータは特に重要になります。データセットに十分で明確な代表例が含まれていない場合、物体検出モデルは一貫したパターンを認識するのに苦労します。
小さな物体の検出に適したデータセットには、通常、高解像度の画像、小さなターゲットの頻繁な出現、および一貫した視覚条件が含まれています。COCO datasetのような汎用データセットは便利な出発点ですが、特定の現実世界のユースケースのスケール、密度、またはコンテキストと一致しないことがよくあります。そのような場合、モデルのパフォーマンスを向上させるために、ドメイン固有のトレーニングデータを収集する必要があります。
アノテーションの品質も重要な役割を果たします。アノテーションは、モデルが予測を学習するための正しい物体のラベルとバウンディングボックスの位置を指定することで、グランドトゥルースを確立します。
小さな物体の場合、バウンディングボックスは慎重かつ一貫して描画される必要があります。小さな物体はピクセルレベルのずれに非常に敏感であるため、ボックスの配置がわずかに異なるだけでも、位置特定精度に目に見えて影響を与える可能性があります。
不十分または一貫性のないアノテーションは、mAPを大幅に低下させる可能性があります。物体に誤ったラベルが付けられていると、モデルは誤ったパターンを学習し、誤検知(偽陽性)が増加する可能性があります。
画像内に物体が存在しているのにグランドトゥルースから欠落している場合、評価中に正しい検出が誤検知と見なされる可能性があります。どちらの状況も全体的なパフォーマンスを低下させます。
興味深いことに、最近の研究では、小さな物体のための平均適合率は、標準的なベンチマークでは多くの場合20%から40%の間にとどまっており、より大きな物体よりも大幅に低いことが示されています。このギャップは、全体的な検出精度におけるデータセット設計とアノテーションの一貫性の重要性を浮き彫りにしています。
Link to this sectionデータ拡張(data augmentation)は精度向上の鍵となります#
データセットの品質とアノテーションの一貫性の重要性についての理解が深まったところで、物体検出モデルが既存のデータからより効果的に学習する方法を見ていきましょう。追加画像の収集が困難または高価な場合でも、すでに利用可能なデータをより有効に活用することでパフォーマンスを向上させる方法はあります。
最も実用的なアプローチの1つはdata augmentationです。これは、小さな物体が学習のための視覚的手がかりをあまり提供しないため、小さな物体の検出において特に重要な役割を果たします。トレーニング中に制御されたバリエーションを導入することで、拡張は新しいデータ収集を必要とせずにモデルの汎化性能を高めるのに役立ちます。
効果的なデータ拡張は、小さな物体を明確に見える状態に保つことに焦点を当てています。制御されたリサイズ、軽いクロッピング、画像タイリングなどの手法は、小さな物体の形状や外観を維持しつつ、より際立たせることができます。目標は、現実の状況での見え方を変えることなく、モデルが小さな物体をより頻繁に、かつわずかに異なる条件下で確認できるようにすることです。
ただし、拡張は慎重に適用する必要があります。一部の変換は、小さな物体の視認性を低下させたり、現実のデータでは起こりそうにない方法で外観を変えたりする可能性があります。そうなると、モデルは正確な物体境界を学習するのに苦労するかもしれません。
Link to this section生成AIによる、よりスマートなデータ拡張#
人気が高まっているもう1つの興味深いデータ拡張のタイプは、生成AIを使用して合成トレーニングデータを作成することです。手作業で収集・ラベル付けされた画像に頼る代わりに、チームは特定の環境、物体のサイズ、照明条件、背景のバリエーションをシミュレートするリアルなシーンを生成できるようになりました。
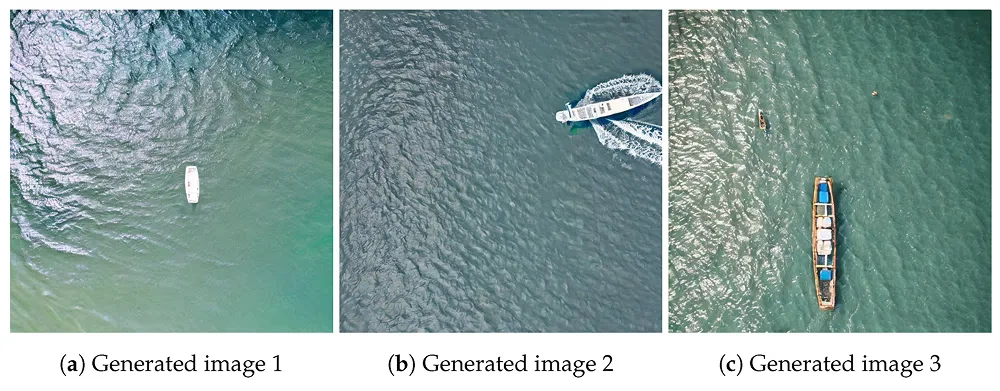
図2:データ拡張に使用される合成空撮画像を見る (ソース)
このアプローチは、現実世界の例を継続的にキャプチャすることが難しい小さな物体の検出に特に役立ちます。スケール、密度、配置を調整するなどして、合成画像内での小さな物体の見え方を制御することで、モデルをより幅広いトレーニングシナリオに触れさせることが可能になります。
実際のデータと慎重に組み合わせると、合成拡張はモデルの堅牢性を向上させ、データ収集コストを削減し、よりターゲットを絞ったパフォーマンス向上をサポートできます。
Link to this section小さな物体のmAPに影響を与える可能性のあるモデルトレーニングの選択#
データセットの品質とアノテーションの一貫性以外にも、モデルトレーニングの選択は小さな物体の検出パフォーマンスに強い影響を与えます。
考慮すべき主要なトレーニング戦略のいくつかを以下に示します:
- 事前学習済みモデルから始める: Ultralytics YOLO26のような事前学習済みモデルは、大規模な画像データセットから一般的な視覚パターンをすでに学習しています。これは、ゼロからトレーニングするよりも強力な出発点を提供し、データが限られている場合に小さな物体を検出する際に特に役立ちます。
- 転移学習を戦略的に使用する: 転移学習とは、事前学習済みモデルを特定のデータセットに適応させることを意味します。これにより、モデルは小さな物体に焦点を合わせるようになり、同時に過学習(一般的なパターンを学習する代わりにトレーニングデータを暗記してしまうこと)を軽減するのに役立ちます。
- クラスの不均衡に対処する: 小さな物体が大きな物体よりも頻繁に現れない場合、モデルは大きな物体の学習を優先する可能性があります。クラスウェイト(クラスの重み付け)やサンプリング戦略などの手法は、小さな物体が無視されないようにするのに役立ちます。
- 信頼度としきい値をチューニングする: 小さな物体は、小さな位置特定エラーに対して敏感です。これらのしきい値を微調整することで、検証および推論中の小さな物体のパフォーマンスをより適切に評価および解釈できるようになります。
Link to this section小さな物体検出のためのモデルアーキテクチャに関する考慮事項#
一般的な物体検出モデルを小さな物体のタスクに使用することもできますが、小さな物体の検出を改善するために特別に設計されたモデルアーキテクチャもあります。例えば、Ultralytics YOLOv8モデルのP2モデルバリアントがあり、これは細かい空間的詳細を保持するように最適化されています。
YOLOv8は、ネットワークの奥深くに移動するにつれて画像を徐々に縮小することで、マルチスケールで処理します。これはモデルがシーン全体を理解するのに役立ちますが、同時に細かい詳細を減少させることにもなります。
物体がすでに非常に小さい場合、このプロセス中に重要な視覚情報が消えてしまう可能性があります。Ultralytics YOLOv8のP2バリアントは、特徴ピラミッドでストライド(stride)が2を使用することでこれに対処しています。
特徴ピラミッドは、さまざまなサイズの物体を検出できるように、複数の内部解像度で画像を分析するモデルの一部です。ストライドを2にすることで、この段階で画像がより段階的に縮小され、元のピクセルレベルの詳細をより多く保持できるようになります。
より多くの空間的詳細が保持されるため、小さな物体はネットワーク内でより多くの目に見える構造を保持します。これにより、モデルは数ピクセルしか占めない物体をより簡単に特定および検出できるようになり、小さな物体のmAPの向上に貢献します。
Link to this section小さな物体検出のためのサイズ認識評価#
mean average precisionはモデル全体のパフォーマンスを要約しますが、異なるサイズの物体をモデルがどれだけうまく処理するかを常に示すわけではありません。小さな物体の場合、パフォーマンスは単なる分類ではなく位置特定精度によって制限されることが多く、バウンディングボックスのわずかなずれが結果に大きな影響を与える可能性があります。
言い換えれば、モデルは物体のクラスを正しく特定できても、予測されたバウンディングボックスがわずかにずれていると、検出が誤りと見なされる可能性があります。小さな物体は少数のピクセルしかカバーしないため、ボックス配置のわずかな変更でも、予測されたボックスとグランドトゥルース間の重なりが大幅に減少する可能性があります。その結果、物体が正しく特定された場合でも評価スコアが低下する可能性があります。
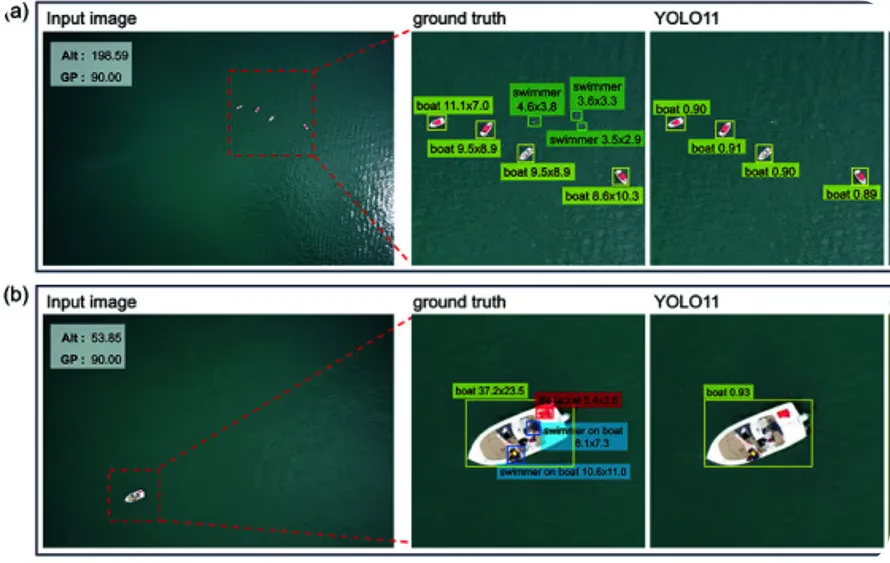
図3:小さな物体の検出評価は難しい場合があります (ソース)
より有益なアプローチは、物体サイズごとにパフォーマンスを評価することです。広く使用されているほとんどのベンチマークでは、小型、中型、大型の物体について平均適合率(AP)を個別に報告しています。
このサイズ別の内訳により、モデルがどこで優れたパフォーマンスを発揮し、どこで苦戦しているかがより明確になります。実際には、small-object APは全体的なmAPよりも遅れていることが多く、集計されたメトリクスでは明らかではない可能性がある位置特定上の課題を浮き彫りにしています。
Link to this sectionデプロイメントの制約と現実世界のトレードオフを考慮する#
モデルのパフォーマンスは、制御されたテスト環境から現実世界のデプロイメントに移行する際に変化することがよくあります。画像解像度、処理速度、利用可能なハードウェアなどの要因が、小さな物体の検出に直接影響するトレードオフを引き起こします。
例えば、小さなターゲットがより多くのピクセルを占め、より詳細を保持するため、入力解像度を上げると小さな物体のmAPが向上する可能性があります。しかし、高解像度はメモリ使用量と処理時間も増加させます。これにより、推論が遅くなり、運用コストが上昇する可能性があります。
図4:小さな物体検出のデプロイメントの課題。画像提供:筆者。
ハードウェアの選択は、これらのトレードオフを管理する上で重要な役割を果たします。より強力なGPUは、より大きなモデルと高速な処理を可能にしますが、デプロイメント環境、特にエッジデバイスは、計算リソースとメモリリソースが限られていることがよくあります。
リアルタイムアプリケーションには別の制約が加わります。低いレイテンシを維持するには、モデルサイズや入力解像度を小さくする必要があり、これが小さな物体の再現率に悪影響を与える可能性があります。最終的に、デプロイメントの決定には、検出パフォーマンスと、ハードウェアの制限、速度要件、全体的なコストとのバランスを取る必要があります。
Link to this sectionまとめ:小さな物体のモデルmAPを向上させる#
小さな物体の検出を向上させるには、特に現実世界の環境で作業する場合、実践的で構造化されたアプローチが必要です。覚えておくべき主なステップの概要は次のとおりです:
- データセットの品質を監査する: データセットに小さな物体の例が十分に含められていること、可能な場合は高解像度の画像を使用していること、そしてモデルがデプロイされる条件を反映していることを確認してください。
- アノテーションの一貫性を検証する: バウンディングボックスが正確で、完全で、一貫してラベル付けされていることを確認します。一貫性のないアノテーションは、位置特定パフォーマンスを直接制限する可能性があります。
- トレーニング設定を意図的にチューニングする: トレーニング中に小さな物体が適切に表現されるよう、バッチサイズ、エポック数、最適化設定を慎重に調整します。
- ステップバイステップで繰り返す: 制御された調整を行い、その影響を測定し、アプローチを洗練させます。着実なデータ主導型の反復が、時間の経過とともに一貫した改善につながります。
Link to this section重要なポイント#
小さな物体のmAPを向上させるには、ランダムな微調整ではなく、構造化されたデータ主導のアプローチが必要です。真の改善は、優れたデータ、一貫したアノテーション、慎重なトレーニング、そして適切な評価方法を組み合わせることから生まれます。現実世界のプロジェクトでは、着実なテストと、測定可能な小さな変更が、より良く、より信頼性の高い小さな物体検出を時間の経過とともに実現します。
成長を続ける私たちのコミュニティに参加し、GitHubリポジトリで実践的なAIリソースを探索してください。今すぐビジョンAIによる開発を始めるには、ライセンスオプションをご覧ください。当社のソリューションページでは、農業におけるAIがどのように農業を変革しているか、またロボティクスにおけるビジョンAIがどのように未来を形作っているかを紹介しています。






