物体検知とUltralyticsのYOLOモデルの進化
物体検知の進化を振り返ります。近年のYOLO (You Only Look Once) モデルがどのように進歩してきたかに焦点を当てます。
コンピュータビジョンは、人工知能(AI)のサブフィールドであり、人間が現実世界を認識するのと同様に、機械に画像やビデオを見て理解させることに焦点を当てています。オブジェクトの認識やアクションの特定は人間にとって自然なことですが、機械の場合、こうしたタスクには特定の専門的なコンピュータビジョン技術が必要です。例えば、コンピュータビジョンにおける主要なタスクの一つがオブジェクト検出であり、これには画像やビデオ内のオブジェクトを特定して位置を特定することが含まれます。
Since the 1960s, researchers have been working on improving how computers can detect objects. Early methods, like template matching, involved sliding a predefined template across an image to find matches. While innovative, these approaches struggled with changes in object size, orientation, and lighting. Today, we have advanced models like Ultralytics YOLO11 that can detect even small and partially hidden objects, known as occluded objects, with impressive accuracy.
コンピュータビジョンが進化を続ける中、こうした技術がどのように発展してきたかを振り返ることは重要です。この記事では、オブジェクト検出の進化を探り、YOLO (You Only Look Once) モデルの変遷に光を当てます。それでは始めましょう!
Link to this sectionコンピュータビジョンの起源#
オブジェクト検出について詳しく触れる前に、コンピュータビジョンがどのように始まったかを見てみましょう。コンピュータビジョンの起源は1950年代後半から1960年代初頭にまで遡り、科学者たちが脳が視覚情報をどのように処理するかを研究し始めた時期に始まります。猫を使った実験において、研究者のデヴィッド・ヒューベルとトルステン・ウィーセルは、脳がエッジや線といった単純なパターンに反応することを発見しました。これが特徴抽出のアイデアの基礎となりました。つまり、視覚システムはより複雑なパターンに進む前に、画像内のエッジなどの基本的な特徴を検出し認識するという概念です。
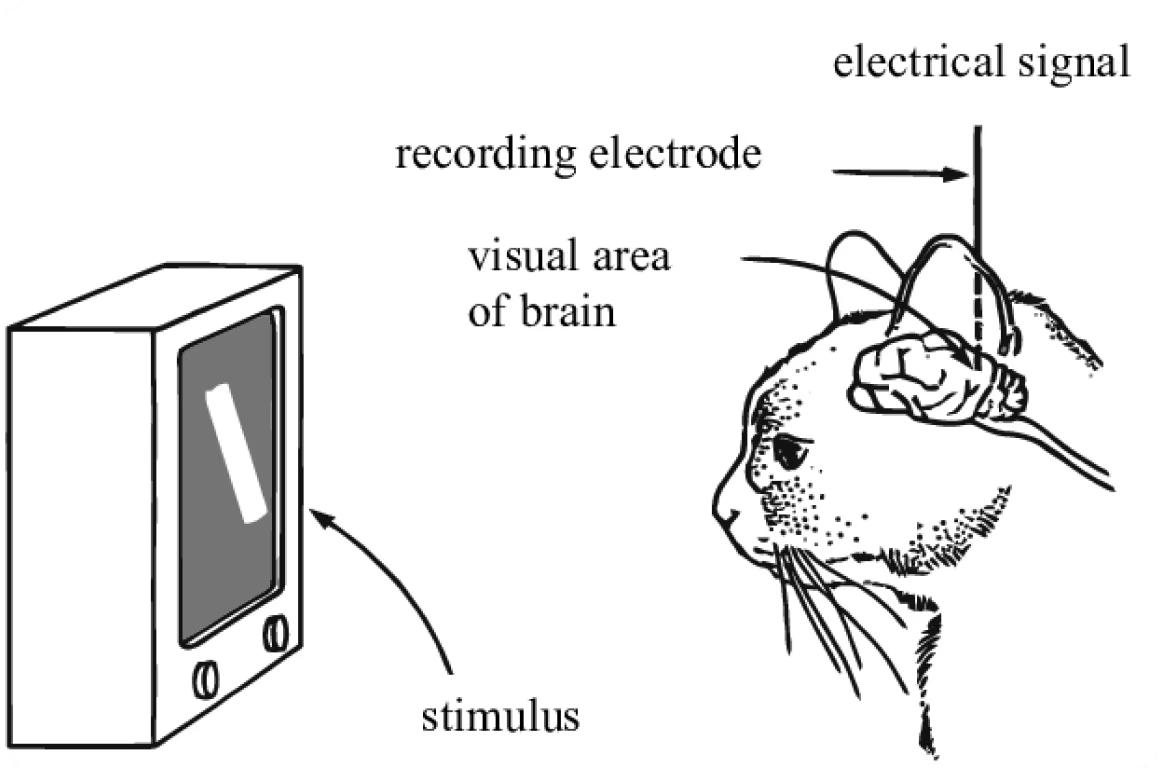
図1. 猫の脳が光のバーにどのように反応するかを学習したことは、コンピュータビジョンにおける特徴抽出の開発に役立ちました。
同時期に、物理的な画像をデジタル形式に変換できる新しい技術が登場し、機械がどのように視覚情報を処理できるかという関心が高まりました。1966年、マサチューセッツ工科大学(MIT)のSummer Vision Projectがさらなる進展をもたらしました。このプロジェクトは完全な成功には至りませんでしたが、画像から背景と前景を分離できるシステムを作成することを目指していました。ビジョンAIコミュニティの多くの人々にとって、このプロジェクトは科学分野としてのコンピュータビジョンの公式な始まりを示しています。
Link to this sectionオブジェクト検出の歴史を理解する#
1990年代後半から2000年代初頭にかけてコンピュータビジョンが進歩するにつれ、オブジェクト検出の手法は、テンプレートマッチングのような基本的な技術から、より高度なアプローチへと移行しました。一般的な手法の一つがHaar Cascadeであり、これは顔検出などのタスクで広く使われるようになりました。これは、スライディングウィンドウで画像をスキャンし、画像内の各セクションでエッジやテクスチャといった特定の特徴をチェックし、それらの特徴を組み合わせて顔のようなオブジェクトを検出する仕組みでした。Haar Cascadeは従来の手法よりもはるかに高速でした。
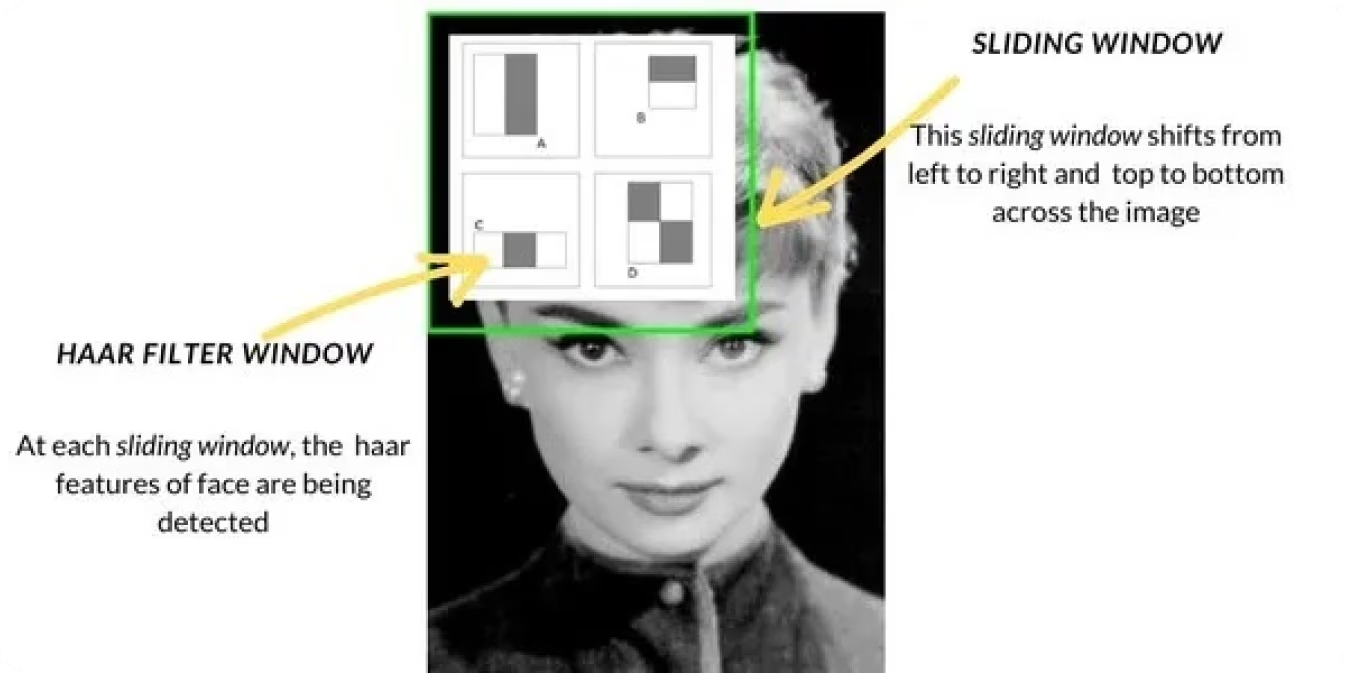
図2. Haar Cascadeを使用した顔検出。
これらと並行して、HOG(Histogram of Oriented Gradients)やSVM(サポートベクターマシン)などの手法も導入されました。HOGはスライディングウィンドウ技術を使用して、画像の小さなセクション内で光と影がどのように変化するかを分析し、その形状に基づいてオブジェクトを特定するのに役立ちました。その後、SVMがこれらの特徴を分類して、オブジェクトの正体を決定しました。これらの手法は精度を向上させましたが、現実世界の環境では依然として苦戦し、今日の技術と比較すると低速でした。
Link to this sectionリアルタイムオブジェクト検出の必要性#
2010年代には、ディープラーニングと畳み込みニューラルネットワーク(CNN)の台頭により、オブジェクト検出において大きな転換がもたらされました。CNNにより、コンピュータは大量のデータから重要な特徴を自動的に学習できるようになり、検出精度が飛躍的に向上しました。
R-CNN(領域ベースの畳み込みニューラルネットワーク)のような初期のモデルは、精度において大きな進歩をもたらし、古い手法よりも高い精度でオブジェクトを特定できるようになりました。
しかし、これらのモデルは画像を複数の段階で処理するため低速であり、自動運転車やビデオ監視のようなリアルタイムアプリケーションには不向きでした。
高速化に重点を置き、より効率的なモデルが開発されました。Fast R-CNNやFaster R-CNNといったモデルは、関心領域の選択方法を洗練させ、検出に必要なステップ数を削減することに貢献しました。これによりオブジェクト検出は高速化されましたが、即時の結果が求められる多くの実用的なアプリケーションにとっては、まだ十分な速度ではありませんでした。リアルタイム検出に対する需要の高まりが、速度と精度のバランスを取ることができる、さらに高速で効率的なソリューションの開発を促進しました。

図3. R-CNN、Fast R-CNN、Faster R-CNNの速度比較。
Link to this sectionYOLO (You Only Look Once) モデル:大きなマイルストーン#
YOLO is an object detection model that redefined computer vision by enabling real-time detection of multiple objects in images and videos, rendering it quite unique from previous detection methods. Instead of analyzing each detected object individually, YOLO’s architecture treats object detection as a single task, predicting both the location and class of objects in one go using CNNs.
このモデルは画像をグリッドに分割し、各領域がそれぞれのエリア内の物体検出を担当する仕組みになっています。各セクションに対して複数の予測を行い、信頼度の低い結果をフィルタリングすることで、正確な結果のみを保持します。
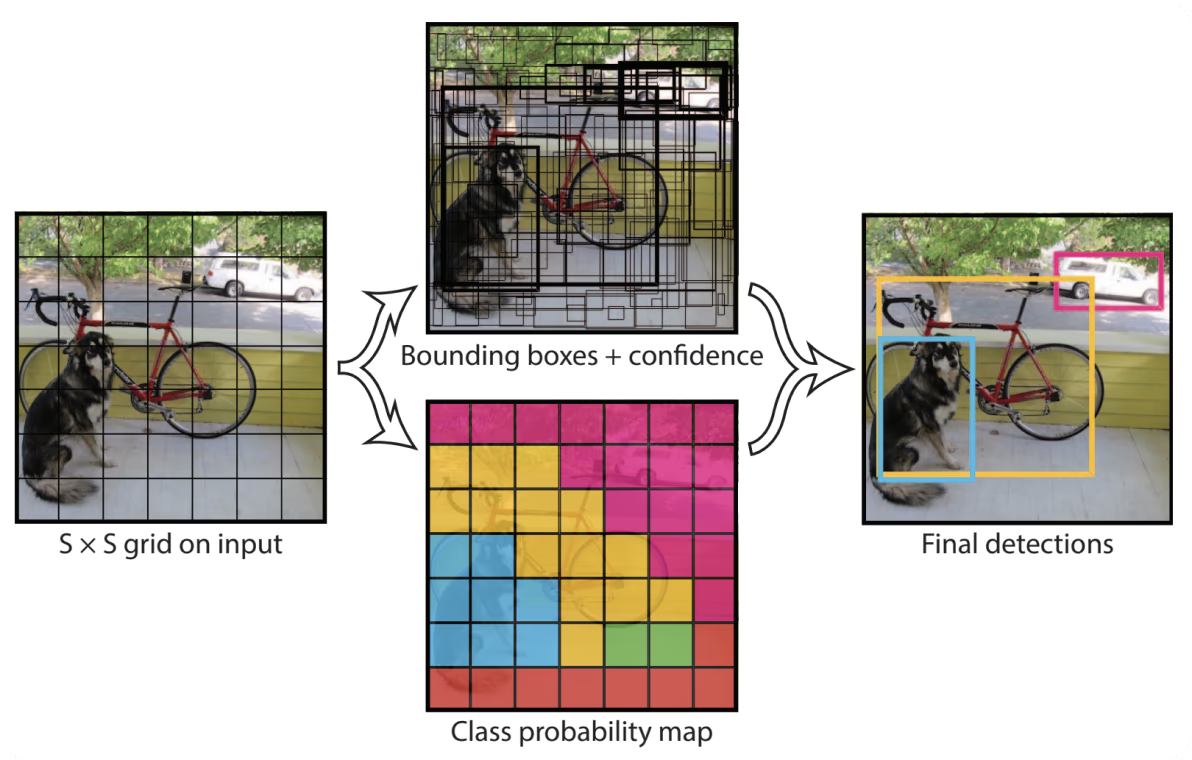
図4. YOLOの仕組みの概要。
YOLOがコンピュータビジョンアプリケーションに導入されたことで、オブジェクト検出は以前のモデルよりもはるかに高速かつ効率的になりました。その速度と精度の高さから、YOLOは製造、医療、ロボティクスといった業界におけるリアルタイムソリューションの選択肢として急速に人気を博しました。
もう一つ重要な点は、YOLOはオープンソースであるため、開発者や研究者が継続的に改良を重ね、さらに高度なバージョンが開発されてきたことです。
Link to this sectionYOLOからYOLO11への軌跡#
YOLOモデルは、各バージョンの進歩の上に成り立ち、時とともに着実に改善されてきました。パフォーマンスの向上に加え、これらの改良により、技術的な経験レベルを問わず多くの人が使いやすいモデルになっています。
For example, when Ultralytics YOLOv5 was introduced, deploying models became simpler with PyTorch, allowing a wider range of users to work with advanced AI. It brought together accuracy and usability, giving more people the ability to implement object detection without needing to be coding experts.
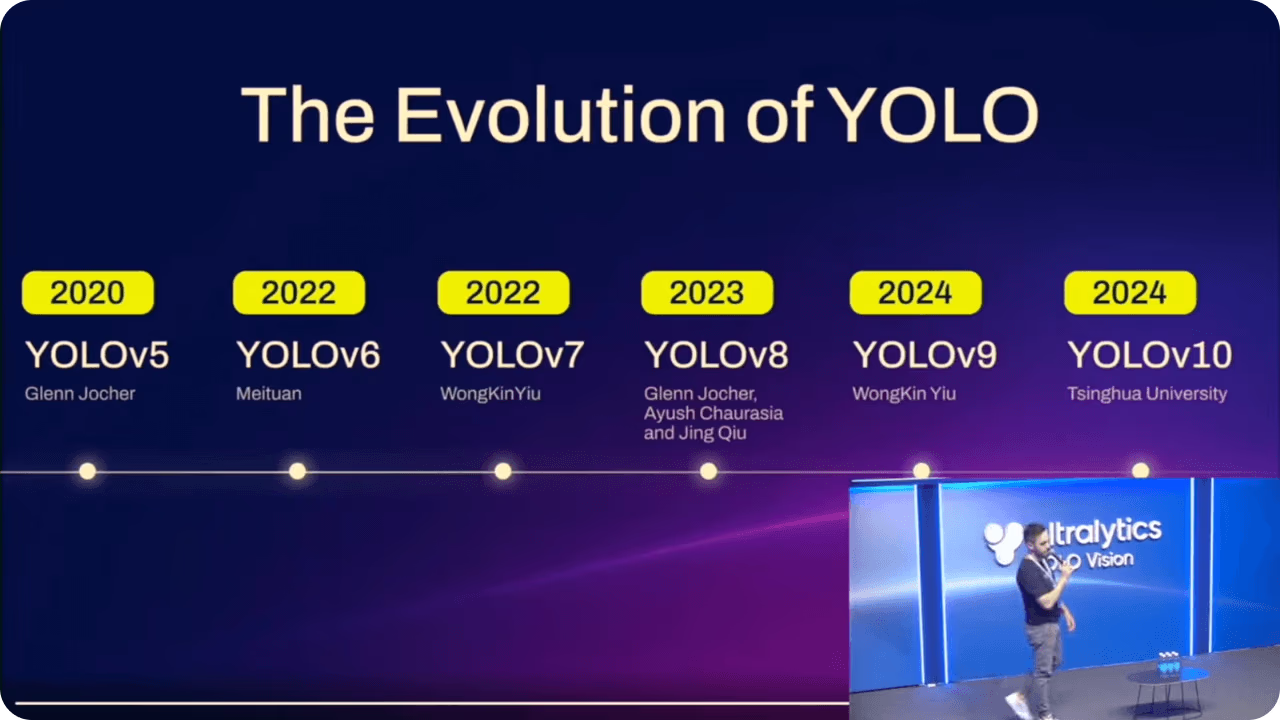
図5. YOLOモデルの進化。
Ultralytics YOLOv8は、インスタンスセグメンテーションのようなタスクのサポートを追加し、モデルの柔軟性を高めることで、この進歩を引き継ぎました。YOLOを基本的な用途だけでなく複雑なアプリケーションにも使いやすくなり、幅広いシナリオで役立つようになりました。
最新モデルのUltralytics YOLO11では、さらなる最適化が施されています。パラメータを削減しつつ精度を向上させたことで、リアルタイムタスクにおいてより効率的になりました。経験豊富な開発者であってもAI初心者であっても、YOLO11は誰にでも利用しやすい高度なオブジェクト検出アプローチを提供します。
Link to this sectionYOLO11を知る:新機能と改善点#
YOLO11, launched at Ultralytics’ annual hybrid event, YOLO Vision 2024 (YV24), supports the same computer vision tasks as YOLOv8, like object detection, instance segmentation, image classification, and pose estimation. So, users can easily switch to this new model without needing to adjust their workflows. Additionally, YOLO11’s upgraded architecture makes predictions even more precise. In fact, YOLO11m achieves a higher mean average precision (mAP) on the COCO dataset with 22% fewer parameters than YOLOv8m.
YOLO11は、スマートフォンやその他のエッジデバイスから、より強力なクラウドシステムまで、幅広いプラットフォームで効率的に動作するように構築されています。この柔軟性により、リアルタイムアプリケーションにおいて様々なハードウェア構成で円滑なパフォーマンスが保証されます。さらに、YOLO11は高速かつ効率的であり、計算コストを削減し、推論時間を短縮します。Ultralytics Pythonパッケージを使用する場合でも、ノーコードのUltralytics HUBを使用する場合でも、既存のワークフローに簡単にYOLO11を統合できます。
Link to this sectionYOLOモデルとオブジェクト検出の未来#
高度なオブジェクト検出がリアルタイムアプリケーションやエッジAIにもたらす影響は、すでに各業界で実感されています。石油・ガス、医療、小売といった分野がAIへの依存を深めるにつれ、高速で正確なオブジェクト検出への需要は高まり続けています。YOLO11は、計算能力が限られたデバイス上でも高性能な検出を実現することで、この需要に応えることを目指しています。
エッジAIの普及に伴い、YOLO11のようなオブジェクト検出モデルは、速度と精度が重要な環境におけるリアルタイム意思決定において、さらに不可欠な存在となるでしょう。設計と適応性の継続的な改善により、オブジェクト検出の未来は、多様なアプリケーションを通じてさらなる革新をもたらすことが期待されています。
Link to this section重要なポイント#
オブジェクト検出は、単純な手法から現在見られる高度なディープラーニング技術へと進化し、長い道のりを歩んできました。YOLOモデルはこの進歩の中心にあり、業界を問わず、より高速で正確なリアルタイム検出を実現してきました。YOLO11はこのレガシーを継承し、効率性の向上、計算コストの削減、精度の向上を実現しており、様々なリアルタイムアプリケーションにおいて信頼できる選択肢となっています。AIとコンピュータビジョンの絶え間ない進歩とともに、オブジェクト検出の未来は明るく、速度、精度、適応性の面でさらなる改善の余地が残されています。
AIについて興味がありますか?学習を続けるために、私たちのコミュニティにぜひご参加ください!GitHubリポジトリをチェックして、製造やヘルスケアといった業界で、私たちがAIを使ってどのように革新的なソリューションを創出しているかをご確認ください。🚀






