Vision AIが実現するタッチフリーのジェスチャー認識技術
コンピュータビジョンが、様々なアプリケーションでハンドジェスチャーを検知、追跡、理解するためのジェスチャー認識技術をどのように強化しているかを探ります。

テクノロジーの進化に伴い、私たちとテクノロジーの関わり方も進化しています。初期の機械は物理的な力や機械式の操作に依存していましたが、現代のコンピュータサイエンスはタッチスクリーンや音声入力を導入しました。
現在、ジェスチャー認識はその次のステップの一部として、自然な動きをユーザーインターフェースとして活用しています。手を振る、つまむ、簡単なハンドサインを送るといった動作で、すでにアプリやスクリーン、機械を操作することが可能です。
このタッチフリーのインタラクションは、AIの分野の一つであるcomputer visionによって支えられており、カメラが捉えた映像を機械が見て解釈できるようにします。Vision AIシステムは、スマートフォン、バーチャルリアリティ(VR)や拡張現実(AR)ヘッドセット、自動車、スマートホームデバイスに組み込むことができ、タップやクリック、ボタン操作の代わりにジェスチャーを用いることで、よりスムーズなユーザー体験を提供します。
非接触型の操作は日常生活でますます一般的になっています。職場や共有スペースでは、物理的な接触を避けることで衛生面と安全性を向上させることができます。多くのデジタル製品もハンズフリーのインタラクションへ移行しており、ジェスチャーはデバイスに触れることなく操作できる、簡単で直感的な方法を提供します。
本記事では、ジェスチャー認識とは何か、computer visionによってどのように精度が向上するのか、そして実際のアプリケーションでどのように利用されているのかを解説します。それでは始めましょう!
Link to this sectionジェスチャー認識とは?#
ジェスチャー認識とは、ハンドサインや身体の動きといった人間のジェスチャーを機械が理解し、デジタルなアクションに変換するセンシング技術です。ユーザーは画面をタップしたりボタンを押したりする代わりに、シンプルで自然な動きを通じてデバイスを操作できます。
これによりインタラクションがより直感的なものとなり、ジェスチャーベースの入力が多くの機械学習やAI駆動型の制御システムで採用されている理由となっています。特にハンドジェスチャー認識は、ジェスチャー認識の中でも最も広く利用されている形式の一つであり、多くの場合computer visionに依存しています。
簡単に言えば、Vision AIソリューションはカメラのフィードから手を検出し、その動きや形状の変化を追跡し、それらのパターンを既知のジェスチャーと照合することで、画面上のアクションをトリガーします。
これらのソリューションの重要な部分は、さまざまなハンドジェスチャーを示すラベル付き画像や動画のデータセットで学習されたcomputer vision modelです。多様な学習データと入念な評価を行うことで、モデルは異なるユーザー、照明条件、背景に対してより適切に汎用化され、実環境でより確実にジェスチャーを認識できるようになります。

図1. ジェスチャーのキーポイントを検出するためのcomputer vision modelの学習に使用されるデータ (Source)
Link to this sectionジェスチャーの種類とヒューマンコンピュータインタラクションの探求#
ジェスチャー認識におけるcomputer visionの役割を詳しく見る前に、一歩立ち止まって、これらのシステムが通常認識するジェスチャーの種類を見てみましょう。
ほとんどの場合、ジェスチャーは静的(static)と動的(dynamic)の2つのカテゴリーに分類されます。静的ジェスチャーは、サムズアップ(いいね)、ストップサイン、ピースサインなど、固定された手のポーズのことです。動きを伴わないため、多くの場合、単一の画像フレームから認識可能です。
一方、動的ジェスチャーは、手を振る、空中でスワイプするといった時間の経過に伴う動きを伴います。これらを認識するために、Vision AIシステムは複数のフレームを解析し、手の動きを追跡してジェスチャーの方向とタイミングを理解する必要があります。
Link to this sectionジェスチャー認識におけるcomputer visionアルゴリズムの役割#
ジェスチャー認識システムはさまざまな方法で構築できます。一部の入力メソッドシステムでは、グローブや手首装着型のトラッカーといったウェアラブルセンサーを使用して手の動きを捉えます。
これらの構成は正確である可能性がありますが、常に実用的とは限りません。ウェアラブルデバイスは装着、セットアップ、充電、メンテナンスが必要であり、共有スペースで使用する場合や日常的な使用では制限を感じることがあります。
そのため、多くの最先端システムは代わりにcomputer visionに頼っています。標準的なRGBカメラや深度センサー、Time-of-Flightセンサーを使用することで、デバイスは追加の機器を装着させることなく、手や身体の動きをリアルタイムで捉えることができます。これにより、visionベースのジェスチャー認識は、スマートフォン、自動車、スマートテレビ、AR/VRヘッドセットに非常に適しています。
例えば、Ultralytics YOLO11や次期モデルのUltralytics YOLO26のようなcomputer vision modelは、物体検出、物体追跡、姿勢推定(pose estimation)などのタスクをサポートしています。これらの機能を使用して、各フレームで手を検出し、時間の経過とともにその動きを追跡し、指先や関節などのキーポイントをマッピングすることが可能です。これにより、手のひらを上げて一時停止、つまんでズーム、スワイプでメニューをナビゲート、またはARやVRでアイテムを選択するために指を差すといったジェスチャーの認識が可能になります。
Link to this sectionヒューマンマシンインタラクション認識に使用されるcomputer visionタスク#
ジェスチャー認識で使用される主なcomputer vision tasksの概要を以下に示します。
- 物体検出(Object detection): このタスクは画像やビデオフレーム内の手の位置を特定するために使用され、通常は手の周囲に境界ボックス(bbox)を描画します。システムがジェスチャー領域に集中し、不要な背景情報を無視するのに役立ちます。
- 物体追跡(Object tracking): 物体検出を基盤として、このタスクは検出された手を複数のフレーム間で追跡し、時間の経過とともにその同一性を維持します。これは、動きや方向が重要となる動的ジェスチャーにおいて特に有用です。
- 姿勢推定(Pose estimation): 境界ボックスに焦点を当てるのではなく、姿勢推定は指先、指の関節、手首などのキーポイントを特定します。これらのランドマークは、指の位置と微妙な動きを捉える単純な手の骨格を作成し、より詳細なジェスチャー分類を可能にします。
- インスタンスセグメンテーション(Instance segmentation): このタスクは、認識可能な手ごとにマスクを生成することで、ピクセルレベルで背景から各手を分離することを目的としています。混雑したシーンや手が重なっている場合、あるいは複数の手がフレーム内に現れる場合に役立ちます。
多くのVision AIソリューションは、これらのタスクを単一のパイプラインの一部として組み合わせて使用します。例えば、システムはまず物体検出を使用して手を見つけ、次に追跡を使用して動的ジェスチャーのためにフレーム間でそれらを追いかけます。
ジェスチャーが指の配置に依存している場合、姿勢推定によってより詳細なキーポイントを追加でき、インスタンスセグメンテーションは混雑したシーンや手が複数重なっている場合に、各手をより正確に分離するのに役立ちます。これらのステップが連携することで、位置情報と動作情報の両方が提供され、ジェスチャー認識の精度と信頼性が向上します。
Link to this sectionVisionベースのジェスチャー認識の仕組み#
ジェスチャー認識を支えるcomputer visionタスクについての理解が深まったところで、次にVisionベースのシステムがどのように機能するかを順を追って見ていきましょう。
典型的なシステムは、カメラからのビデオキャプチャから始まり、デバイスが対応していれば深度データも同時に取得します。その後、リサイズ、安定化、ノイズやモーションブラーの低減など、モデルが一貫して処理しやすいように、画像処理を使用してフレームが前処理されます。
次に、システムは検出やセグメンテーションを使用してフレーム内の手を識別し、追跡を使用して時間の経過とともにそれらを追いかけます。アプリケーションがより細かい詳細を必要とする場合、指先や関節などのキーポイントを抽出するために姿勢推定を実行することもあります。この情報を使用して、モデルは「いいね」のような単一フレームのポーズであれ、スワイプのような動作パターンであれ、そのジェスチャーを分類します。
最後に、認識されたジェスチャーが、スクロール、ズーム、アイテムの選択、音量調整、あるいはAR/VRインタラクションの制御といったインターフェース上のアクションにマッピングされます。正確なパイプラインはアプリケーションによって異なり、よりシンプルなアプリケーションではステップ数が少なく、より複雑なアプリケーションでは精度を高めるために検出、追跡、姿勢推定を組み合わせています。
Link to this sectionVisionベースのジェスチャー認識の応用#
次に、手の位置を把握するためにジェスチャー認識が実際のアプリケーションでどのように使用されているかを見ていきましょう。
Link to this section車載インフォテインメントシステムでのジェスチャーベースのインタラクション#
ジェスチャー認識は、スマート車両のインターフェース、特にインフォテインメントシステムに現れ始めています。これはシンプルな手の動きで特定の機能を操作する便利な方法であり、ドライバーがタッチスクリーンや物理ボタンに手を伸ばす頻度を減らすことができます。例えば、素早いジェスチャーで音量の調整、通話の管理、あるいは画面メニューのナビゲートを行うことが可能です。
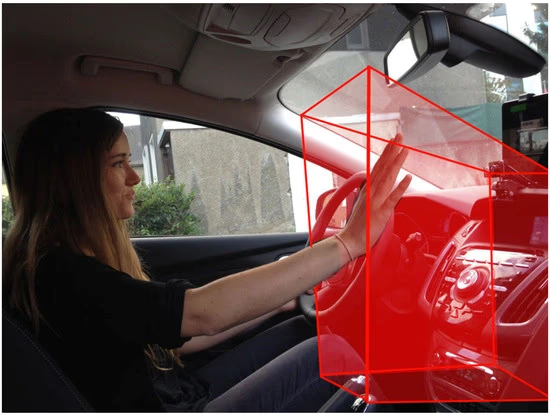
図2. インフォテインメントシステムの検出範囲内でハンドジェスチャーを行うドライバー (Source)
Link to this sectionゲーミングにおけるジェスチャー駆動型のインタラクション#
ゲーミングや没入型体験において、ジェスチャーベースの制御は人々が仮想世界と関わる方法を変えつつあります。コントローラーやジョイスティックだけに頼るのではなく、プレイヤーは自然な手の動きを使ってメニューをナビゲートしたり、仮想オブジェクトを拾ったり、キャラクターを操作したり、ゲーム内のアクションをトリガーしたりできます。

図3. ハンドジェスチャーを使用してゲームをプレイしている様子 (Source)。
この種のタッチフリーのインタラクションは、特にARやVRにおいて、より流動的に感じられます。その結果、ハンドトラッキングやジェスチャーコントロールはVRやMRヘッドセットの一般的な機能となりつつあります。
Link to this sectionスマートホームデバイスのためのシームレスなジェスチャーコントロール#
スマートテレビ、スピーカー、接続された照明といったスマートホームデバイスは、迅速なタッチフリーアクションのためにジェスチャーベースの制御をサポートし始めています。簡単な手の動きだけで、スイッチやリモコンに手を伸ばさなくても、照明を点けたり、音量を調整したり、基本的なコマンドをトリガーしたりできます。
例えば、ホームエンターテインメントの設定では、内蔵または接続された深度カメラがスワイプ、指差し、手を上げるといったジェスチャーを認識できます。これにより、部屋の反対側からメニューを閲覧したり、設定を変更したり、選択を確定したりすることが容易になります。バックグラウンドでは、computer vision modelがリアルタイムでカメラフィードを処理し、これらのジェスチャーを検出して解釈します。
Link to this sectionロボット工学におけるAI搭載のジェスチャーコントロール#
工場で作業員が部品を運んでいる、手袋を着用している、あるいは稼働中の機器から安全な距離に立っている状況で、ロボットを誘導する必要がある場面を考えてみてください。このような環境では、ボタンやコントロールパネルに手を伸ばすことは、時間がかかるだけでなく、危険を伴う可能性さえあります。
対照的に、ジェスチャーベースの制御システムは、これらの機械と対話するためのより実用的でハンズフリーな方法となります。これは、人間と協力して作業するように設計された協働ロボット(コボット)にとって特に有用です。
コントロールパネルまで歩いて行く代わりに、オペレーターはシンプルなハンドシグナルを使用して、離れた場所からロボットを開始、停止、または誘導できます。これにより物理的な制御への依存が減り、作業現場におけるより安全なワークフローをサポートします。
ディープラーニングモデルや学習アルゴリズムによって可能になった高度なVisionベースの制御システムは、基本的なコマンドを超えることも可能です。より細かい手の動きを解釈し、小さな方向の変化や、より正確な誘導および自動化に対してスムーズに応答することができます。

図4. ユーザーのジェスチャーを解析するロボットハンド (Source)
Link to this sectionジェスチャー認識技術の長所と短所#
以下は、ジェスチャー認識技術を使用する主な利点です:
- アクセシビリティの向上: ジェスチャーは、キーボード、タッチスクリーン、コントローラーの使用が困難なユーザーに代替手段を提供できます。
- 遠隔操作が可能: ジェスチャーは部屋の反対側からでも認識でき、これはスマートテレビ、キオスク、ホームデバイスにとって役立ちます。
- デバイス間での柔軟性: 同様のジェスチャーセットを電話、自動車、スマートディスプレイ、AR/VRヘッドセット全体で機能させることができ、インタラクションの一貫性が保たれます。
一方で、精度と一貫性に影響を与える可能性のある実際の課題がいくつかあります。考慮すべき要因を以下に示します:
- 照明やカメラの品質の問題: 低照度、グレア(眩しさ)、影、または低解像度のカメラは認識性能を低下させる可能性があります。これは結果としてモーションコントロールに影響を与えることがあります。
- ユーザー間のばらつき: 人によってジェスチャーの仕方は自然に異なり、手のサイズ、指の柔軟性、アクセサリーの違いが精度に影響を与える可能性があります。
- 高速な動きの制限: 素早いジェスチャーはモーションブラーを引き起こしたり、特にフレームレートの低いカメラではモデルがキーフレームを見逃したりする可能性があります。
Link to this section重要なポイント#
ジェスチャー認識技術は研究室の域を超え、今や日常のデバイスやイノベーションの一部となっています。具体的には、computer visionによってゲーミング、ロボット工学、スマートホーム、自動車システムにおけるタッチフリー操作が実現されています。Visionモデルが向上するにつれ、これらのタッチフリーのインターフェースは構築が容易になり、より広く利用されるようになるでしょう。
computer vision modelの詳細については、当社のcommunityやGitHub repositoryをご確認ください。AI in agricultureやcomputer vision in logisticsといったアプリケーションについて読むには、ソリューションページをご覧ください。当社のlicensing optionsをチェックして、独自のVision AI modelの構築を始めましょう。






