Mejorando la reidentificación de vehículos con modelos Ultralytics YOLO
Aprende cómo los modelos Ultralytics YOLO pueden desempeñar un papel en las soluciones de reidentificación de vehículos proporcionando detecciones precisas y exactas.

Cuando ves una carrera de Formula One, es fácil identificar el coche de tu equipo favorito. El rojo brillante de Ferrari o el plateado de Mercedes destacan vuelta tras vuelta.
Pedirle a una máquina que haga lo mismo, no en un circuito limpio, sino en calles concurridas llenas de tráfico, es mucho más difícil. Por eso la reidentificación de vehículos (re-ID de vehículos) ha ganado atención recientemente en el ámbito de la IA.
La reidentificación de vehículos da a las máquinas la capacidad de reconocer el mismo vehículo a través de cámaras con múltiples vistas o que no se solapan. También tiene como objetivo identificar vehículos tras una oclusión temporal (cuando un vehículo está parcialmente oculto) o cambios en la iluminación y el punto de vista.
Una tecnología fundamental que impulsa la re-ID de vehículos es la computer vision. La computer vision es un subcampo de la inteligencia artificial que se centra en enseñar a las máquinas a entender e interpretar información visual, como imágenes y vídeos. Usando esta tecnología, los sistemas de IA pueden analizar las características de los vehículos y rastrearlos de forma fiable a través de grandes redes de cámaras para aplicaciones como la vigilancia urbana y el control del tráfico.
En particular, los modelos de Vision AI como Ultralytics YOLO11 y el próximo Ultralytics YOLO26 admiten tareas como la detección y el seguimiento de objetos. Pueden localizar rápidamente vehículos en cada fotograma y seguir su movimiento por una escena. Cuando estos modelos se combinan con redes de reidentificación de vehículos, el sistema conjunto puede reconocer el mismo vehículo a través de diferentes señales de cámara, incluso cuando cambian las vistas o las condiciones de iluminación.
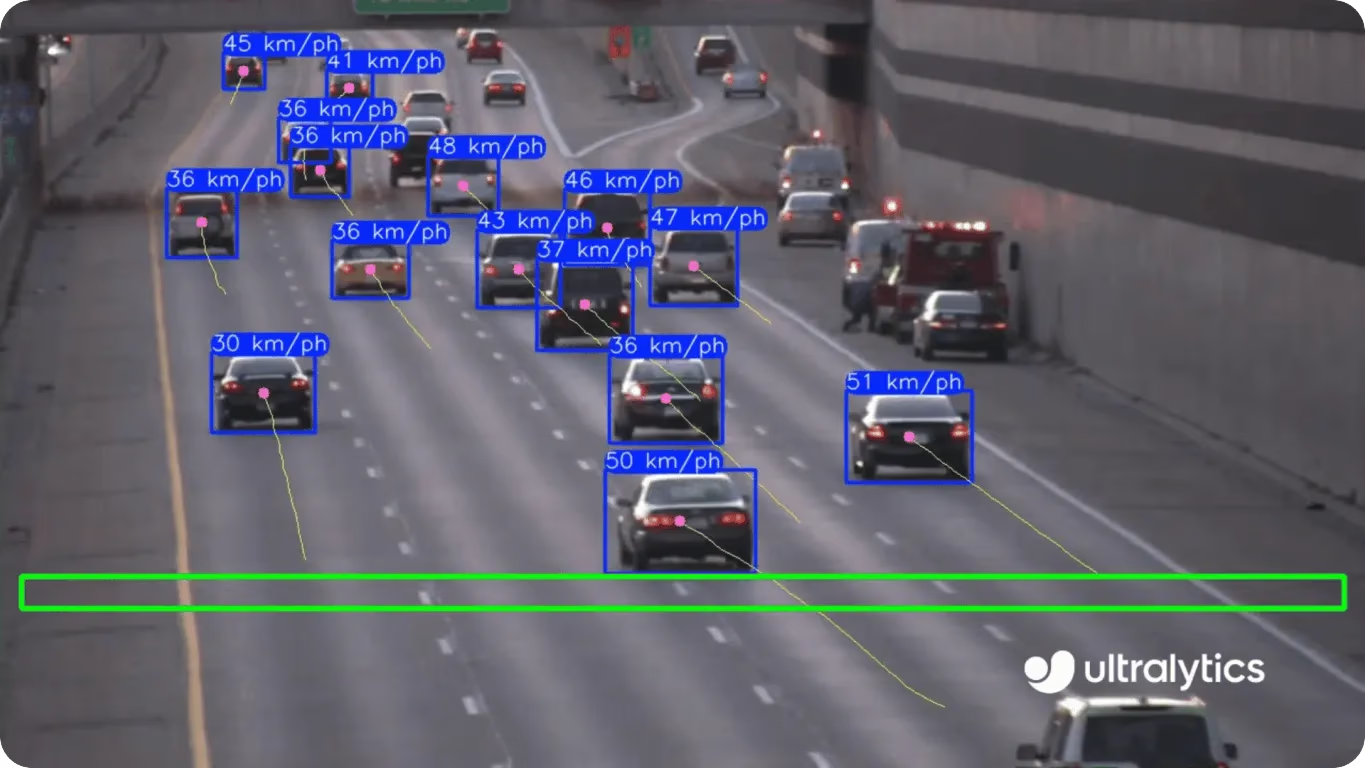
Fig 1. Un ejemplo del uso de YOLO11 para el seguimiento de vehículos y la estimación de velocidad (Source)
En este artículo, analizamos cómo funciona la reidentificación de vehículos, la tecnología que la hace posible y dónde se utiliza en los sistemas de transporte inteligente. ¡Empecemos!
Link to this section¿Qué es la reidentificación de vehículos?#
La reidentificación de vehículos es una application in computer vision importante. Se centra en reconocer el mismo vehículo a medida que aparece en diferentes cámaras que no se solapan, manteniendo su identidad constante mientras se mueve por una ciudad. Esto es un reto porque cada cámara puede capturar el vehículo desde un ángulo diferente, con una iluminación distinta o con una oclusión parcial.
Considera una situación en la que un sedán azul pasa por una intersección y luego aparece en una calle distinta, vigilada por otra cámara. El ángulo, la iluminación y el fondo han cambiado, y otros coches pueden bloquear la vista brevemente. A pesar de esto, el sistema de re-ID de vehículos aún debe determinar que es el mismo vehículo.
Los avances recientes en deep learning, especialmente con redes neuronales convolucionales (CNNs) y modelos basados en Transformer, han hecho que este proceso sea mucho más preciso. Estos modelos pueden extraer patrones visuales significativos y distinguir entre vehículos que se parecen, identificando aun así el correcto.
En los sistemas de transporte inteligente, esta capacidad permite la monitorización continua, la reconstrucción de rutas y el análisis del tráfico en toda la ciudad, lo que ofrece a los sistemas de ciudades inteligentes una imagen más clara de cómo se mueven los vehículos. Ayudan a mejorar la seguridad y la eficiencia.
Link to this sectionEntender cómo funciona la reidentificación de vehículos#
Por lo general, las imágenes de vídeo de intersecciones, aparcamientos y carreteras se analizan utilizando técnicas de reidentificación de vehículos para determinar si el mismo vehículo aparece en diferentes cámaras. Este concepto es similar a la reidentificación de personas, donde los sistemas rastrean a individuos a través de múltiples vistas, pero aquí el enfoque se centra en analizar las características específicas del vehículo en lugar de la apariencia humana.
El proceso conlleva varios pasos clave, cada uno diseñado para ayudar al sistema a detectar vehículos, extraer sus características visuales y compararlos de forma fiable a través de diferentes puntos de vista.
A grandes rasgos, el sistema detecta primero los vehículos en cada fotograma y, a continuación, extrae características como el color, la forma y la textura para crear una representación digital única, o embedding, para cada uno. Estos embeddings se comparan a lo largo del tiempo y entre cámaras, a menudo con el apoyo del seguimiento de objetos y comprobaciones espacio-temporales, para decidir si dos avistamientos pertenecen al mismo vehículo.
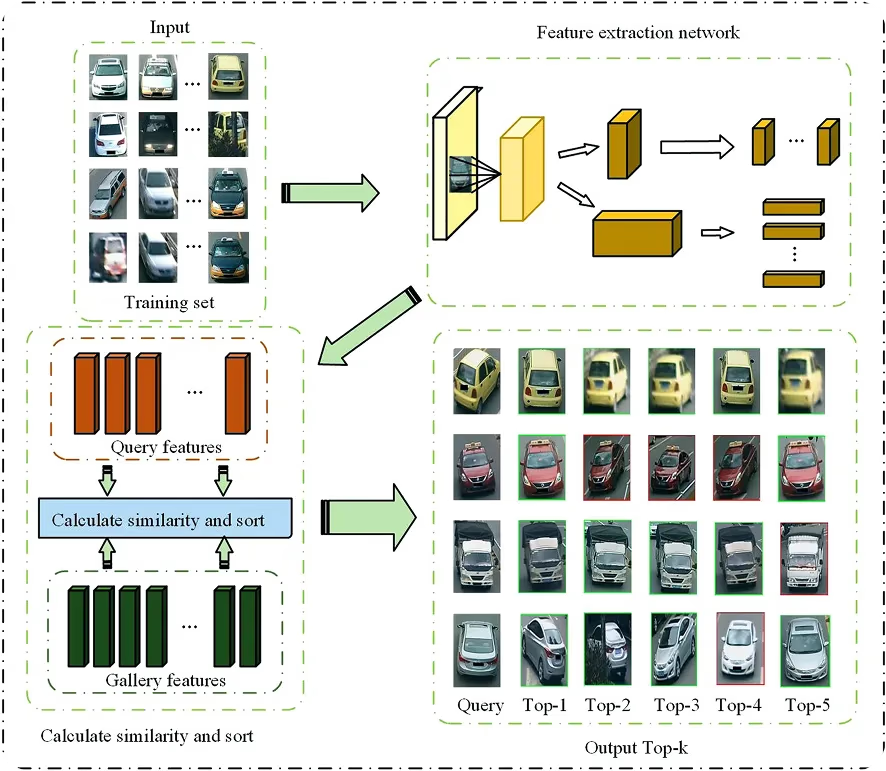
Fig 2. Cómo funciona la reidentificación de vehículos. (Source)
Aquí tienes un análisis más detallado de este proceso:
- Object detection: El sistema identifica y localiza primero los vehículos dentro de cada fotograma de vídeo, para saber exactamente qué regiones procesar. Este paso suele ser gestionado por modelos de detección de objetos.
- Feature extraction: Tras la detección, una red dedicada de re-ID o de extracción de características analiza cada recorte de vehículo y genera mapas de características o representaciones que capturan detalles visuales como el color, la forma, la textura y partes distintivas.
- Embedding generation: Estas características extraídas se convierten en una representación numérica llamada feature embedding. Este embedding actúa como una huella digital que captura cómo se ve el vehículo desde diferentes ángulos. Antes de la comparación, estos embeddings suelen normalizarse para que las diferencias causadas por la iluminación, el contraste o los ajustes de la cámara no interfieran en la comparación de identidad. La normalización garantiza que el sistema se centre en características significativas relacionadas con la identidad en lugar de en el ruido.
- Object tracking: Dentro de una misma vista de cámara, los algoritmos de seguimiento conectan las detecciones a lo largo de los fotogramas, lo que ayuda a mantener una identidad coherente a medida que el vehículo se desplaza por la escena.
- Cross-camera matching: Para comparar el mismo vehículo en diferentes cámaras, el sistema compara embeddings (generados por la red de re-ID) junto con información de tiempo y ubicación. Este paso determina si dos avistamientos pertenecen al mismo vehículo, incluso cuando las cámaras no se solapan.
Link to this sectionCómo los modelos YOLO de Ultralytics pueden apoyar la reidentificación de vehículos#
Los modelos YOLO de Ultralytics desempeñan un papel de apoyo importante en las tuberías de reidentificación de vehículos. Aunque no realizan la re-ID por sí solos, proporcionan otras capacidades esenciales, como la detección rápida y el seguimiento estable, de las que dependen las redes de re-ID para una comparación precisa entre cámaras.
A continuación, veamos más de cerca cómo los modelos YOLO de Ultralytics como YOLO11 pueden mejorar los sistemas de reidentificación de vehículos.
Link to this sectionUn módulo preciso de detección de vehículos: La primera parte de los sistemas de re-ID#
La base de cualquier sistema de reidentificación de vehículos es una detección precisa de objetos. Los modelos YOLO de Ultralytics como YOLO11 son una gran opción para esto, ya que pueden detectar rápidamente vehículos en cada fotograma, incluso en escenas concurridas con oclusiones parciales, tráfico intenso o condiciones de iluminación cambiantes.
También pueden ser entrenados a medida, lo que significa que puedes ajustar el modelo con tu propio conjunto de datos para que aprenda a reconocer tipos de vehículos específicos, como taxis, furgonetas de reparto o vehículos de flota. Esto es especialmente útil cuando una solución requiere una detección más especializada. Al proporcionar cuadros delimitadores limpios y precisos, los modelos YOLO de Ultralytics ofrecen a las redes de re-ID entradas de alta calidad con las que trabajar, lo que conduce a una comparación más fiable entre cámaras.
Link to this sectionApoyo al seguimiento fiable en una sola cámara#
Una vez detectados los vehículos, modelos como YOLO11 también pueden permitir un seguimiento de objetos estable dentro de una misma vista de cámara. El seguimiento de objetos es el proceso de seguir un vehículo detectado a lo largo de fotogramas consecutivos y asignarle una ID coherente a medida que se mueve.
Con soporte integrado para algoritmos de seguimiento como ByteTrack y BoT-SORT en el Ultralytics Python package, YOLO11 puede mantener IDs coherentes a medida que los vehículos se mueven por una escena. Este seguimiento estable reduce los cambios de identidad antes de que el sistema de re-ID tome el control, lo que finalmente mejora la precisión de la comparación entre cámaras.
Link to this sectionRe-ID opcional a nivel de rastreador para mejorar la estabilidad de la identidad#
Además del seguimiento basado en el movimiento estándar, el Ultralytics Python package incluye capacidades de Re-ID basadas en la apariencia opcionales dentro de su rastreador BoT-SORT. Esto significa que el rastreador puede usar características de apariencia visual, no solo patrones de movimiento o superposición de cuadros delimitadores, para determinar si dos detecciones pertenecen al mismo vehículo.
Cuando se activa, BoT-SORT extrae embeddings de apariencia ligeros del detector o de un modelo de clasificación YOLO11 y los utiliza para verificar la identidad entre fotogramas. Esta señal de apariencia adicional ayuda al rastreador a mantener IDs más estables en situaciones difíciles, como breves oclusiones, vehículos que pasan cerca unos de otros o pequeños cambios causados por el movimiento de la cámara.
Aunque esta re-ID integrada no pretende sustituir la reidentificación de vehículos completa entre cámaras, mejora la coherencia de la identidad dentro de una misma vista de cámara y produce tracklets más limpios en los que pueden confiar los módulos de re-ID posteriores. Para usar estas funciones de seguimiento basadas en la apariencia, simplemente activa la re-ID en un archivo de configuración del rastreador BoT-SORT estableciendo “with_reid” en “True” y seleccionando qué modelo proporcionará las características de apariencia.
Para más detalles, puedes consultar la documentation page on object tracking de Ultralytics, que explica las opciones de re-ID disponibles y cómo configurarlas.
Link to this sectionProporcionar entradas de alta calidad a las redes de re-ID#
Más allá de mejorar la estabilidad de la identidad durante el seguimiento, los modelos YOLO también desempeñan un papel importante en la preparación de entradas visuales limpias para la propia red de re-ID.
Después de detectar un vehículo, su cuadro delimitador suele recortarse y enviarse a una red de reidentificación, que extrae las características visuales necesarias para la comparación. Dado que los modelos de re-ID dependen en gran medida de estas imágenes recortadas, unas entradas deficientes, como recortes borrosos, mal alineados o incompletos, pueden dar lugar a embeddings más débiles y a una comparación entre cámaras menos fiable.
Los modelos YOLO de Ultralytics ayudan a reducir estos problemas produciendo de forma consistente cuadros delimitadores limpios y bien alineados que capturan completamente el vehículo de interés. Con recortes más claros y precisos, la red de re-ID puede centrarse en detalles significativos como el color, la forma, la textura y otras características distintivas. Las entradas de alta calidad conducen a un rendimiento de re-ID más fiable y preciso entre las vistas de las cámaras.
Link to this sectionHabilitar la comparación entre cámaras al combinar con un modelo de re-ID#
Aunque los modelos YOLO de Ultralytics no realizan la reidentificación por sí solos, proporcionan la información crítica que una red de re-ID necesita para comparar vehículos a través de diferentes vistas de cámara. Modelos como YOLO11 pueden encargarse de localizar y rastrear vehículos dentro de cada cámara, mientras que el modelo de re-ID determina si dos recortes de vehículos de diferentes ubicaciones pertenecen a la misma identidad.
Cuando estos componentes funcionan juntos, YOLO para la detección y el seguimiento, y un modelo de embedding dedicado para la extracción de características, forman una tubería completa de comparación de vehículos multicámara. Esto hace posible asociar el mismo vehículo a medida que se desplaza por una red de cámaras mayor.
Por ejemplo, en un estudio reciente, los investigadores utilizaron un modelo YOLO11 ligero como vehicle detector en un sistema de seguimiento multicámara en línea. El estudio concluyó que el uso de YOLO11 ayudaba a reducir el tiempo de detección sin sacrificar la precisión, lo que mejoró el rendimiento general del seguimiento posterior y la comparación entre cámaras.

Fig 3. Seguimiento multivehículo y reidentificación entre cámaras basado en YOLO11. (Source)
Link to this sectionArquitecturas basadas en deep learning para re-ID de vehículos#
Ahora que entendemos mejor cómo los modelos YOLO de Ultralytics pueden apoyar la reidentificación de vehículos, echemos un vistazo más de cerca a los modelos de deep learning que gestionan los pasos de extracción de características y comparación. Estos modelos son responsables de aprender el aspecto de los vehículos, crear embeddings robustos y distinguir entre vehículos visualmente similares a través de diferentes vistas de cámara.
Aquí tienes algunos ejemplos de los componentes principales de deep learning utilizados en los sistemas de reidentificación de objetos:
-
Feature extraction con CNNs: Las redes neuronales convolucionales como ResNet50 o ResNet101 aprenden características profundas a través del reconocimiento de patrones, identificando elementos como el color, la forma y la textura que diferencian un vehículo de otro. Estos patrones aprendidos se convierten después en embeddings que actúan como la representación digital única del vehículo.
-
Attention mechanisms y transformers: Las redes y capas de atención, incluida la atención espacial, pueden ayudar a resaltar regiones importantes de un vehículo, como los faros, las ventanas o las zonas de la matrícula. La atención espacial centra el modelo en dónde se encuentran las señales visuales más informativas, mientras que los modelos basados en Transformer como Vision Transformers (ViT) capturan relaciones globales a lo largo de toda la imagen. Juntos, mejoran la precisión detallada cuando los vehículos parecen muy similares.
-
Redes basadas en partes y multirrama: Algunos modelos de re-ID analizan regiones específicas del vehículo por separado, como el techo, los pilotos traseros o los paneles laterales, y luego combinan los resultados. Esto significa que el sistema sigue siendo robusto incluso cuando los vehículos están parcialmente ocultos o vistos desde ángulos difíciles.
Además de estos componentes arquitectónicos, el aprendizaje métrico desempeña un papel clave en el entrenamiento de modelos de re-ID de vehículos. Las funciones de pérdida como triplet loss, contrastive loss y cross-entropy loss ayudan al sistema a aprender embeddings fuertes y discriminativos al unir imágenes del mismo vehículo y separar las de otros distintos.
Link to this sectionConjuntos de datos y puntos de referencia populares para la reidentificación de vehículos#
En la investigación de computer vision, la calidad de un conjunto de datos tiene un gran impacto en el rendimiento de un modelo una vez desplegado. Un conjunto de datos proporciona las imágenes o vídeos etiquetados a partir de los cuales aprende un modelo.
Para la reidentificación de vehículos, estos conjuntos de datos de última generación deben capturar condiciones diversas como iluminación, cambios de punto de vista y variaciones meteorológicas. Esta diversidad ayuda a los modelos a manejar la complejidad de los entornos de transporte del mundo real.
Aquí tienes un vistazo a los conjuntos de datos populares que apoyan el entrenamiento, la optimización y la evaluación de modelos de reidentificación de vehículos:
- VeRi-776 dataset: Es una colección de más de 50.000 imágenes de vehículos anotadas capturadas desde 20 cámaras de la ciudad. Las anotaciones incluyen la ID del vehículo, el color, el modelo y las regiones de la matrícula, lo que permite un aprendizaje detallado de las características.
- VehicleID dataset: Este conjunto de datos a gran escala tiene más de 200.000 imágenes que representan a más de 26.000 vehículos. A menudo se elige para estudiar la escalabilidad y realizar comparaciones de referencia entre diferentes métodos.
- VeRi-Wild dataset: Está diseñado para reflejar la variabilidad del mundo real, incluyendo diferencias en el punto de vista, el clima y la oclusión parcial. Se utiliza habitualmente para evaluar la robustez y la generalización de los modelos.

Fig 4. Ejemplo de vehículos en el conjunto de datos VeRi-776. (Source)
El rendimiento de los modelos en estos conjuntos de datos se evalúa normalmente utilizando métricas como la precisión media media (mAP) y la precisión de Rank-1 o Rank-5. El mAP mide con qué precisión el modelo recupera todas las coincidencias relevantes para un vehículo determinado, mientras que las puntuaciones de Rank-1 y Rank-5 indican si la coincidencia correcta aparece en la parte superior de la lista de resultados o dentro de las primeras predicciones.
Juntos, estos puntos de referencia proporcionan a los investigadores una forma coherente de comparar diferentes enfoques y desempeñan un papel importante a la hora de guiar el desarrollo de sistemas de reidentificación de vehículos más precisos y fiables para su uso en el mundo real.
Link to this sectionAplicaciones de la reidentificación de vehículos#
Ahora que hemos cubierto los fundamentos, recorramos algunos casos de uso del mundo real donde la reidentificación de vehículos apoya flujos de trabajo prácticos de transporte, movilidad y vigilancia.
Link to this sectionVigilancia y control del tráfico urbano#
Las carreteras de las ciudades concurridas están constantemente llenas de movimiento, y las cámaras de tráfico suelen tener dificultades para seguir al mismo vehículo a medida que se desplaza entre diferentes zonas. Los cambios en la iluminación, las escenas concurridas y los vehículos que parecen casi idénticos pueden hacer que se pierdan las identidades entre cámaras.
La reidentificación de vehículos soluciona esto detectando los vehículos con claridad, extrayendo características distintivas y manteniendo IDs coherentes incluso en imágenes de baja resolución o muy concurridas. El resultado es un seguimiento continuo y fluido a través de la red, lo que proporciona a los equipos de tráfico una imagen más clara de cómo se mueven los vehículos por la ciudad y permite respuestas más rápidas e informadas ante la congestión y los incidentes.
Link to this sectionSistemas de aparcamiento inteligente#
Las instalaciones de aparcamiento inteligente dependen de una identificación coherente de los vehículos para gestionar la entrada, la salida, el control de acceso y la asignación de plazas. Sin embargo, las cámaras en estos entornos suelen capturar vehículos desde ángulos inusuales y bajo una iluminación difícil, como en garajes subterráneos, zonas sombreadas o aparcamientos al aire libre al anochecer.
Estas condiciones dificultan confirmar si se está viendo el mismo vehículo en diferentes zonas. Cuando las identidades no son coherentes, los registros de aparcamiento pueden romperse, el control de acceso se vuelve menos fiable y los conductores pueden sufrir retrasos. Por eso, muchos sistemas de aparcamiento inteligente incorporan modelos de reidentificación de vehículos para mantener una identidad estable para cada vehículo mientras se mueve por la instalación.
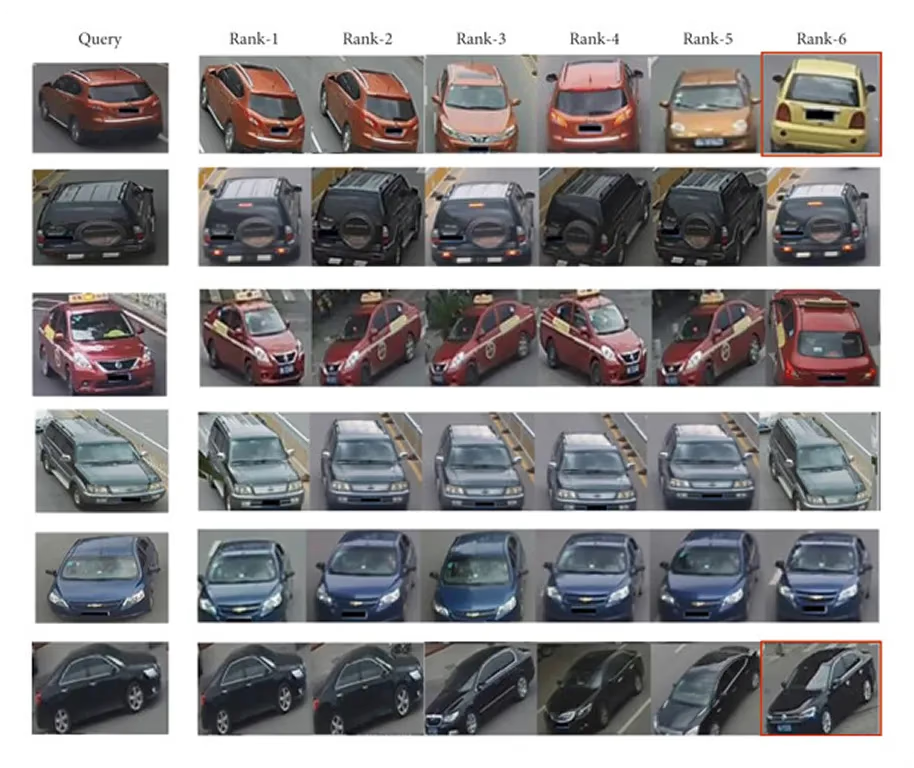
Fig 5. Un ejemplo de reidentificación de vehículos que muestra la imagen del vehículo seleccionado a la izquierda y los resultados de búsqueda coincidentes a la derecha. (Source)
Link to this sectionCumplimiento de la ley y análisis forense#
Partiendo de la base de la monitorización del tráfico, la reidentificación de vehículos también desempeña un papel importante en el cumplimiento de la ley y las investigaciones forenses. En muchos casos, los agentes necesitan seguir a un vehículo a través de varias cámaras, pero las matrículas pueden ser ilegibles, no estar o estar ocultas deliberadamente.
Las escenas concurridas, la poca visibilidad y la oclusión parcial pueden hacer que diferentes vehículos parezcan engañosamente similares, lo que hace que la identificación manual sea lenta y poco fiable. La reidentificación de vehículos puede utilizarse para rastrear el movimiento de un vehículo a través de redes de cámaras que no se solapan analizando sus características visuales en lugar de depender únicamente de las matrículas.
Esto significa que los investigadores pueden seguir más fácilmente los movimientos de un vehículo, entender cuándo apareció en diferentes lugares y confirmar su trayectoria antes y después de un incidente. La re-ID de vehículos impulsada por IA también admite tareas como el seguimiento de vehículos sospechosos, la revisión de imágenes de incidentes o la determinación de la dirección en la que viajó un vehículo antes o después de un suceso.
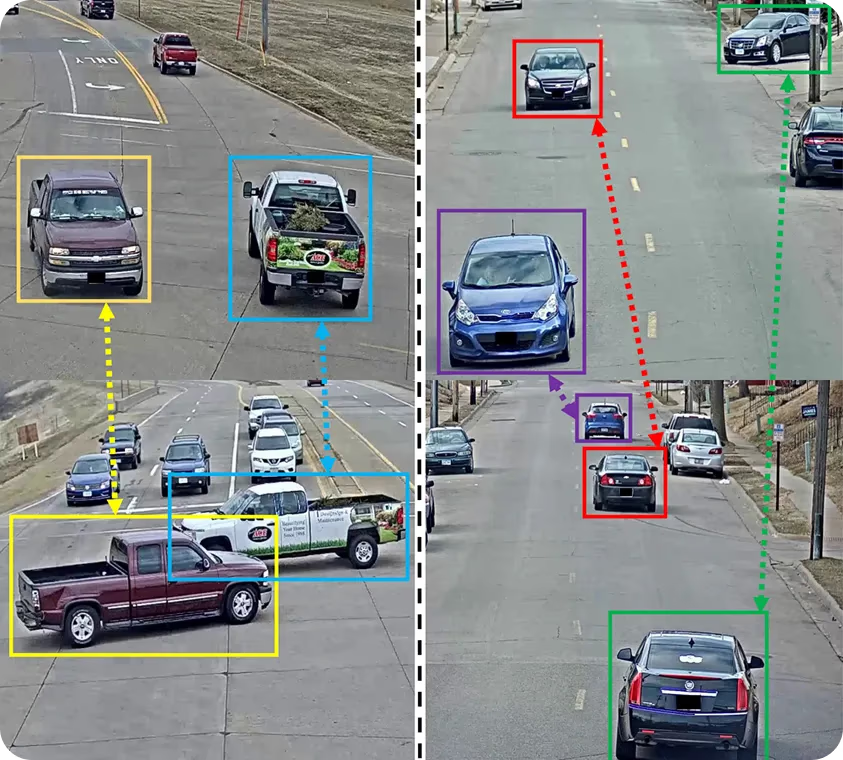
Fig 6. Vehículos emparejados a través de diferentes cámaras con perspectivas variadas. (Source)
Link to this sectionSeguimiento de flotas y logística#
Las operaciones de flota y logística suelen depender del GPS, etiquetas RFID y registros manuales para rastrear el movimiento de los vehículos, pero estas herramientas dejan lagunas en las zonas cubiertas por cámaras de seguridad o de patio, como muelles de carga, patios de almacenes y redes de carreteras internas.
Los vehículos se mueven con frecuencia entre cámaras que no se solapan, desaparecen detrás de estructuras o parecen casi idénticos a otros de la flota, lo que dificulta confirmar si se ha visto el mismo vehículo en diferentes lugares. Los sistemas de reidentificación de vehículos pueden ayudar a cerrar estas brechas analizando los detalles visuales y la información temporal para mantener una identidad coherente para cada vehículo mientras se mueve por la instalación.
Esto ofrece a los gestores de flotas una visión más completa de la actividad dentro de sus centros, lo que apoya tareas como la verificación de rutas de entrega, la identificación de movimientos inusuales y la garantía de que los vehículos siguen las rutas previstas.
Link to this sectionPros y contras de las tareas de re-ID de vehículos#
Aquí tienes algunos de los beneficios clave de usar la reidentificación de vehículos habilitada por IA:
- Reducción de la carga de trabajo manual: La re-ID de vehículos automatiza las tareas de comparación de identidad que, de otro modo, requerirían una revisión manual exhaustiva, reduciendo significativamente el tiempo y el esfuerzo necesarios para analizar las imágenes de vídeo.
- Automatización y perspectivas en tiempo real: Al combinar la detección, el seguimiento y la comparación de características, la re-ID de vehículos admite una monitorización continua y automatizada, y puede proporcionar alertas en tiempo real para una respuesta más rápida ante incidentes.
- Escalabilidad y adaptabilidad: Los modelos de re-ID pueden adaptarse a nuevos entornos, condiciones de iluminación o ángulos de cámara mediante un aprendizaje robusto de características, extracción de características multiescala y representaciones invariantes que permanecen estables bajo cambios visuales. Estas capacidades los hacen adecuados tanto para grandes redes urbanas como para despliegues más pequeños.
Aunque la reidentificación de vehículos ofrece muchas ventajas, también hay algunas limitaciones que considerar. Aquí tienes algunos factores que afectan a su fiabilidad en entornos del mundo real:
- Alta demanda computacional: La extracción de características, la generación de embeddings y la comparación entre cámaras requieren una potencia de procesamiento significativa, especialmente cuando se monitorizan grandes redes de cámaras.
- Variabilidad ambiental: Factores como la iluminación nocturna, los cambios meteorológicos, las sombras y las oclusiones pueden degradar la capacidad del modelo para mantener identidades coherentes a través de las escenas.
- Limitaciones de los conjuntos de datos y dominios: Los modelos entrenados con conjuntos de datos limitados o idealizados pueden no generalizar bien a las condiciones del mundo real sin un ajuste fino o una adaptación al dominio adicionales.
Link to this sectionEl camino a seguir para los métodos de reidentificación de vehículos#
La reidentificación de vehículos sigue avanzando a medida que evoluciona la tecnología. Las publicaciones recientes de IEEE, CVPR y arXiv, junto con presentaciones en conferencias internacionales, destacan un claro cambio hacia modelos más ricos que combinan múltiples fuentes de datos y un razonamiento de características más avanzado. El trabajo futuro en este área se centrará probablemente en construir sistemas que sean más robustos, eficientes y capaces de manejar la variabilidad del mundo real a escala.
Por ejemplo, una dirección prometedora es el uso de transformer-based models y redes de agregación de grafos. Los Transformers pueden analizar una imagen completa y entender cómo encajan todos los detalles visuales, lo que ayuda al sistema a reconocer el mismo vehículo incluso cuando cambia el ángulo o la iluminación.
Los modelos basados en grafos llevan esto un paso más allá al tratar las diferentes partes del vehículo o las vistas de la cámara como puntos conectados en una red. Esto permite al sistema comprender la correlación entre esos puntos clave y tomar mejores decisiones sobre las identidades de los vehículos y las características discriminativas.
Otro avance clave es la multi-modal data fusion y la fusión de características. En lugar de depender solo de imágenes, los sistemas más nuevos combinan información visual con otras señales multimedia, como datos de GPS o patrones de movimiento de sensores. Este contexto adicional facilita que el sistema mantenga la precisión cuando los vehículos están parcialmente bloqueados, cuando la iluminación es deficiente o cuando los ángulos de la cámara cambian repentinamente.
Link to this sectionConclusiones clave#
La reidentificación de vehículos se está convirtiendo en una metodología clave en los sistemas de transporte inteligente, ayudando a las ciudades a rastrear vehículos de forma más fiable a través de diferentes cámaras. Gracias a los avances en el aprendizaje profundo y a una mejor validación utilizando conjuntos de datos más ricos y diversos, estos sistemas son cada vez más precisos y prácticos en condiciones del mundo real.
A medida que la tecnología evoluciona, es importante equilibrar la innovación con prácticas responsables en torno a la privacidad, la seguridad y la ética. En general, estos avances están allanando el camino para redes de transporte más inteligentes, seguras y eficientes.
Explora más sobre IA visitando nuestro repositorio de GitHub y uniéndote a nuestra comunidad. Echa un vistazo a nuestras páginas de soluciones para aprender sobre IA en robótica y visión artificial en la fabricación. ¡Descubre nuestras opciones de licencia para empezar con la IA de visión hoy mismo!






