Explorer la vision par ordinateur dans les applications de navigation
Découvre comment la vision par ordinateur dans les solutions de navigation améliore la cartographie en temps réel, la reconnaissance d'objets et la réalité augmentée pour des voyages plus intelligents et sûrs.

De nos jours, sortir ton téléphone, saisir une destination et suivre des instructions pas à pas pour y arriver semble sans effort. Cela prend juste quelques secondes. Mais cette commodité quotidienne est le résultat d'années de progrès technologiques. La navigation a fait un long chemin, des cartes papier et boussoles aux systèmes intelligents capables de comprendre et de réagir au monde en temps réel.
L'une des technologies à l'origine de ce changement est la vision par ordinateur, une branche de l'intelligence artificielle (IA) qui permet aux machines d'interpréter les informations visuelles comme le font les humains. Les outils de navigation de pointe utilisent désormais des images en temps réel provenant de satellites, de caméras embarquées et de capteurs au niveau de la rue pour améliorer la précision des cartes, surveiller les conditions routières et guider les utilisateurs à travers des environnements complexes.
Dans cet article, nous explorerons comment la vision par ordinateur améliore la navigation en perfectionnant les cartes GPS, en offrant des mises à jour du trafic en temps réel et en soutenant des technologies telles que la navigation en réalité augmentée et les véhicules autonomes.
Link to this sectionSystèmes de navigation IA avec cartographie 3D immersive#
Utiliser des outils comme Google Maps pour naviguer dans la vie quotidienne est devenu très courant, que tu te diriges à travers la ville ou que tu cherches un café à proximité. À mesure que les technologies d'IA sont plus largement adoptées, nous voyons des fonctionnalités de plus en plus avancées comme Immersive View, introduite en 2023 par Google Maps, qui permet aux utilisateurs de prévisualiser des parties de leur trajet dans un environnement 3D. Cela est rendu possible grâce à une combinaison d'IA, de photogrammétrie et de vision par ordinateur.
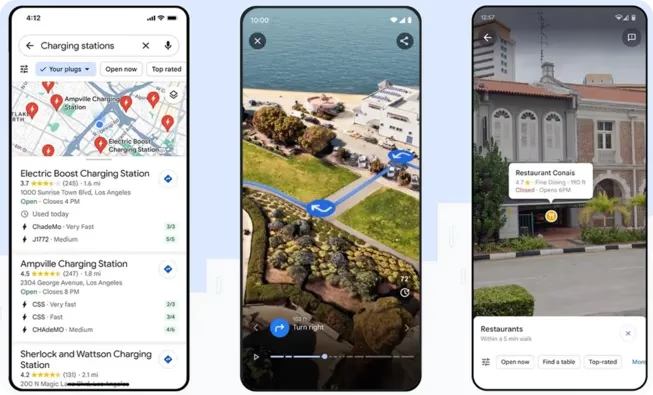
Fig 1. Immersive View de Google Maps.
Tout commence avec des milliards d'images haute résolution capturées par une gamme d'équipements spécialisés. Cela inclut les voitures Street View, des véhicules équipés de caméras à 360 degrés qui circulent dans les villes, et les appareils Trekker, des sacs à dos portables avec des caméras montées utilisés pour capturer des images dans des endroits où les véhicules ne peuvent pas accéder, comme les sentiers de randonnée ou les ruelles étroites.
Ces images sont alignées avec les données cartographiques en utilisant la photogrammétrie, une technique qui assemble des photos 2D prises sous différents angles pour créer des modèles 3D précis des rues, des bâtiments et du terrain.
La vision par ordinateur est ensuite utilisée pour analyser ces modèles en employant la détection d'objets et la segmentation d'image pour identifier et étiqueter des caractéristiques importantes telles que les panneaux de signalisation, les trottoirs, les passages piétons et les entrées de bâtiments.

Fig 2. Immersive View utilise la segmentation pour segmenter des objets dans une rue.
Les données étiquetées sont utilisées pour entraîner des systèmes d'IA qui reconnaissent comment les repères visuels diffèrent selon les régions. Par exemple, le système peut facilement distinguer un panneau « SLOW » (RALENTIR) aux États-Unis, qui est généralement un losange jaune ou orange, d'un panneau similaire au Japon, qui est habituellement un triangle rouge et blanc. Ce niveau de compréhension rend l'expérience de navigation plus précise et culturellement avertie.
Enfin, Immersive View superpose des chemins de navigation en direct sur l'environnement 3D, offrant une expérience fluide et intuitive qui montre exactement où tu te diriges.
Link to this sectionLa réalité augmentée dans les solutions de navigation#
Nous avons probablement tous fait l'expérience de tourner en rond en essayant de comprendre dans quelle direction Google Maps nous indique d'aller. Cette confusion est exactement ce que la navigation par réalité augmentée (AR), une technologie qui superpose des informations numériques sur la vue de la caméra en temps réel, vise à résoudre. Elle change la façon dont les gens trouvent leur chemin dans des lieux fréquentés comme les rues des villes ou les grands espaces intérieurs.
Les cartes classiques peuvent être difficiles à suivre, surtout lorsque les signaux GPS sont faibles ou ne fonctionnent pas bien. La navigation AR s'attaque à ce problème en affichant des directions numériques, des flèches et des étiquettes directement sur la vue caméra en direct du monde réel. Cela signifie que les utilisateurs voient des conseils qui correspondent aux rues et aux bâtiments qui les entourent, ce qui rend beaucoup plus facile de savoir où aller.
Link to this sectionComment la réalité augmentée est utilisée dans la navigation#
La navigation AR repose sur des modèles de vision par ordinateur pour comprendre l'environnement via la caméra d'un appareil. Cela implique diverses tâches comme la localisation d'image, qui détecte des caractéristiques telles que les bords des bâtiments ou les panneaux de rue et les fait correspondre avec une carte stockée. La localisation et cartographie simultanées (SLAM) créent une carte de l'environnement tout en suivant la position de l'appareil en temps réel.
Par exemple, l'aéroport de Zurich a été le premier à implémenter le Live View de Google Maps pour la navigation intérieure. Les passagers peuvent utiliser les caméras de leur téléphone pour voir des flèches et des directions superposées dans l'environnement réel, les guidant à travers les terminaux vers les portes d'embarquement, les boutiques et les services. Cela améliore l'expérience des passagers en facilitant la navigation dans des espaces intérieurs complexes.

Fig 3. L'aéroport de Zurich utilise la vision par ordinateur et l'AR pour guider les passagers à l'intérieur.
Link to this sectionRenforcer la sécurité routière avec des systèmes de navigation IA#
Les rues des villes deviennent de plus en plus fréquentées chaque jour. Avec plus de voitures sur la route, des trottoirs bondés et une activité constante, maintenir une circulation fluide et sécurisée est un défi croissant. Pour aider à gérer le chaos, de nombreuses villes se tournent vers l'IA et la vision par ordinateur.
Des caméras intelligentes et des capteurs installés aux intersections et le long des routes capturent un flux constant de données visuelles. Ces images sont traitées en temps réel pour détecter les accidents, surveiller le flux de circulation, repérer les nids-de-poule et détecter des choses comme le stationnement illégal ou le comportement risqué des piétons.
Un exemple intéressant de cela est la Smart Airport Expressway à Hangzhou, en Chine. Cette autoroute de 20 kilomètres, reliant le centre-ville de Hangzhou à l'aéroport international de Xiaoshan, a été améliorée avec des caméras haute résolution et des radars à ondes millimétriques. Ces appareils collectent en continu des données vidéo et de capteurs, qui sont ensuite analysées en utilisant la vision par ordinateur.
Plutôt que de simplement enregistrer des images, le système interprète ce qui se passe sur la route. Les algorithmes de vision par ordinateur détectent les collisions de véhicules, reconnaissent les infractions au code de la route et identifient même les piétons ou les mouvements inhabituels près des sorties d'autoroute. Cela permet aux responsables du trafic de réagir aux incidents en quelques secondes, sans avoir besoin d'être physiquement sur place.
Les données alimentent également un jumeau numérique : un modèle virtuel 3D en direct de l'autoroute qui montre les conditions de trafic en temps réel, les détails des véhicules et la congestion émergente. Les agents de circulation surveillent cette interface visuelle pour gérer le flux, émettre des alertes intelligentes et réagir aux incidents rapidement et précisément.
Link to this sectionMobilité autonome permise par la vision par ordinateur dans la navigation#
La navigation aujourd'hui va bien au-delà du simple fait d'aller d'un point A à un point B. C'est maintenant une partie essentielle des systèmes intelligents qui déplacent les personnes, gèrent les marchandises et prennent des décisions en temps réel - que ce soit sur la route ou à l'intérieur des entrepôts.
Au cœur de beaucoup de ces systèmes se trouve la vision par ordinateur, permettant aux machines d'interpréter les données visuelles et de réagir instantanément à leur environnement. Passons en revue quelques exemples pour voir comment cette technologie transforme la navigation dans différents environnements.
Link to this sectionDes robots d'entrepôt naviguant avec la vision par ordinateur#
Les robots deviennent essentiels pour l'avenir de la logistique, surtout dans les opérations d'entrepôt à grande échelle. À mesure que la demande en commerce électronique augmente, les entreprises comptent de plus en plus sur des machines équipées de vision par ordinateur pour naviguer dans des environnements complexes, trier des articles et gérer l'inventaire avec vitesse et précision.
Prends, par exemple, les centres de distribution d'Amazon, où plus de 750 000 robots travaillent aux côtés des humains pour maintenir les opérations efficaces. Ces robots comptent énormément sur la vision par ordinateur pour naviguer dans les étages d'entrepôt occupés, identifier les articles et prendre des décisions rapides et précises.
L'un de ces systèmes est Sequoia, une plateforme robotique conçue pour accélérer la gestion de l'inventaire. Elle utilise une vision par ordinateur avancée pour scanner, compter et organiser les produits entrants, aidant à rationaliser les processus de stockage et de récupération.
De même, Vulcan, un bras robotique, utilise des caméras et l'analyse d'image pour prélever des articles en toute sécurité sur les étagères, ajustant sa prise en fonction de la forme et de la position de chaque objet, et reconnaissant même quand une assistance humaine est nécessaire. Pendant ce temps, Cardinal, un autre robot équipé de vision, se spécialise dans le tri : il scanne des piles mélangées de colis et les place précisément dans les bons chariots de sortie.

Fig 4. Cardinal soulevant des colis avec précision depuis une pile.
Link to this sectionLa vision par ordinateur dans la navigation des véhicules autonomes#
Jusqu'à présent, nous avons vu comment la vision par ordinateur aide à la fois les personnes et les robots à naviguer dans leurs environnements. Mais c'est tout aussi crucial pour les systèmes autonomes, comme les voitures autonomes, où la navigation dépend entièrement de ce que le véhicule peut voir et comprendre en temps réel.
Un bon exemple est le système Tesla Vision. Tesla a adopté une approche basée uniquement sur des caméras pour la conduite autonome, supprimant le radar et d'autres capteurs au profit d'un réseau de caméras qui fournissent une vue complète à 360 degrés de l'environnement de la voiture. Ces caméras alimentent des données visuelles dans l'ordinateur de conduite entièrement autonome (FSD), qui utilise des réseaux de neurones profonds pour interpréter l'environnement et prendre des décisions de conduite en une fraction de seconde.
Basé sur ce qu'il voit, le système décide quand diriger, accélérer, freiner ou changer de voie - tout comme le ferait un conducteur humain, mais entièrement grâce à des entrées visuelles. Tesla améliore continuellement ce système en collectant et en apprenant à partir d'énormes quantités de données de conduite réelles à travers sa flotte.

Fig 5. Tesla utilise la vision par ordinateur pour une navigation sûre et autonome (Source : Tesla).
Link to this sectionAvantages et inconvénients de la vision par ordinateur dans la navigation#
Voici quelques avantages clés de l'utilisation de la vision par ordinateur dans la navigation, surtout dans les systèmes où la précision, la sécurité et la prise de décision en temps réel sont essentielles :
- Réduit la consommation de carburant : En aidant les conducteurs à éviter les embouteillages et les itinéraires avec arrêts fréquents, la vision par ordinateur peut réduire la consommation globale de carburant et le temps de trajet, rendant les trajets quotidiens plus efficaces.
- Détecte l'usure de la route et les problèmes d'infrastructure : Les solutions basées sur la vision peuvent scanner pour trouver des nids-de-poule, des marquages au sol effacés, des panneaux cassés et des infrastructures endommagées, fournissant aux équipes de maintenance des données fiables en temps réel.
- S'intègre parfaitement avec d'autres outils d'IA : La vision par ordinateur peut être combinée avec des assistants vocaux, des modèles de prédiction comportementale ou des algorithmes d'optimisation d'itinéraire pour créer une expérience de navigation hautement intelligente et personnalisée.
Bien que la vision par ordinateur apporte de nombreux avantages à la navigation, elle comporte également quelques limitations importantes à prendre en compte lors de l'implémentation de telles solutions. Voici quelques défis clés à garder à l'esprit :
- Manque de généralisation : Les modèles entraînés sur des environnements ou des scénarios spécifiques ont souvent du mal lorsqu'ils sont déployés dans de nouveaux contextes ou des contextes changeants sans réentraînement.
- Limitations d'éclairage : Les systèmes de vision dépendent d'un bon éclairage et d'un temps clair pour bien fonctionner. Dans le brouillard, la pluie battante ou l'obscurité, leur performance chute à moins d'être combinés avec des capteurs comme LiDAR ou radar.
- Risques pour la vie privée : Les systèmes de navigation utilisant des caméras peuvent capturer des personnes et des propriétés privées sans consentement. Cela soulève des problèmes de vie privée qui doivent être soigneusement traités lors du développement et du déploiement.
Link to this sectionPoints clés#
La vision par ordinateur réinvente la navigation en rendant les cartes plus dynamiques, les systèmes de trafic plus intelligents et la mobilité plus accessible. Ce qui était autrefois des itinéraires statiques sont maintenant des expériences interactives en temps réel - alimentées par des prévisualisations 3D immersives, des directions guidées par AR et des technologies de transport autonome.
À mesure que la technologie avance, il est probable que l'accent soit mis sur la manière de rendre ces systèmes plus inclusifs, adaptables et responsables. Le progrès continu dépendra de l'amélioration de la précision à travers divers environnements, du maintien d'une performance fiable et de la protection de la vie privée des utilisateurs. L'avenir de la vision par ordinateur dans la navigation réside dans la construction de solutions qui sont non seulement intelligentes, mais aussi attentionnées dans leur conception et leur impact.
Rejoins notre communauté grandissante ! Explore notre dépôt GitHub pour en apprendre sur l'IA, et consulte nos options de licence pour commencer tes projets d'IA visuelle. Intéressé par des innovations comme l'IA dans le commerce de détail et la vision par ordinateur dans l'agriculture ? Visite nos pages de solutions pour en découvrir plus !






