Guía de calibración de cámaras para visión artificial en 2025
Aprende cómo la calibración de cámaras mejora la IA de visión al corregir distorsiones, mejorar la estimación de profundidad y aumentar la precisión en diversas aplicaciones de visión artificial.

Las cámaras no ven el mundo como los humanos. A menudo, terminan capturando imágenes con distorsiones y cambios de perspectiva que pueden afectar la precisión de los modelos de visión artificial. La calibración de cámaras puede corregir estas distorsiones y asegurar que los modelos de visión artificial puedan percibir los objetos tal como son realmente en el mundo físico. Este proceso implica corregir la distorsión del objetivo, ajustar la distancia focal y alinear los sensores para ayudar a las cámaras a capturar imágenes precisas.
Específicamente, una calibración de cámara precisa es clave para estimar la profundidad y medir distancias correctamente. Los modelos de visión artificial como Ultralytics YOLO11 necesitan datos de entrada bien calibrados para realizar diversas tareas de visión artificial, como la detección de objetos y la estimación de la postura. Sin las imágenes de entrada adecuadas, el rendimiento del modelo puede disminuir y provocar errores en aplicaciones del mundo real.
Diferentes métodos de calibración de cámaras, desde los patrones tradicionales de tablero de ajedrez hasta técnicas avanzadas basadas en IA, pueden ayudar a mejorar la precisión. Por ejemplo, la calibración 3D (tridimensional) ayuda a los modelos a entender la profundidad, mientras que una matriz de calibración convierte las coordenadas del mundo real en espacio de imagen para una mayor precisión.
En esta guía, cubriremos los fundamentos de la calibración de cámaras para visión artificial, incluidos los parámetros clave, diferentes métodos y la optimización para aplicaciones de IA en el mundo real.
Link to this sectionLa importancia de la calibración de cámaras en la visión artificial#
La calibración de cámaras se utiliza para ajustar la configuración de una cámara y asegurar que las imágenes coincidan con precisión con las medidas del mundo real. Garantiza que los objetos en una imagen aparezcan en la posición, tamaño y proporción correctos, evitando distorsiones que podrían engañar a los modelos de IA.
Sin una calibración adecuada, las cámaras pueden causar distorsión del objetivo, haciendo que los objetos parezcan estirados o desalineados. Esto afecta la precisión de la detección, el seguimiento y la estimación de la profundidad de objetos, lo que lleva a errores en aplicaciones impulsadas por IA. En particular, modelos como YOLO11 funcionan de manera más eficaz cuando los datos de entrada están correctamente calibrados, reduciendo los errores en la interpretación espacial y mejorando la toma de decisiones en el mundo real.
La calibración precisa es especialmente importante cuando se trata de drones, coches autónomos y visión robótica. La desalineación en estos sistemas puede llevar a cálculos de distancia incorrectos, lo que afecta a tareas como la navegación y la detección de obstáculos.
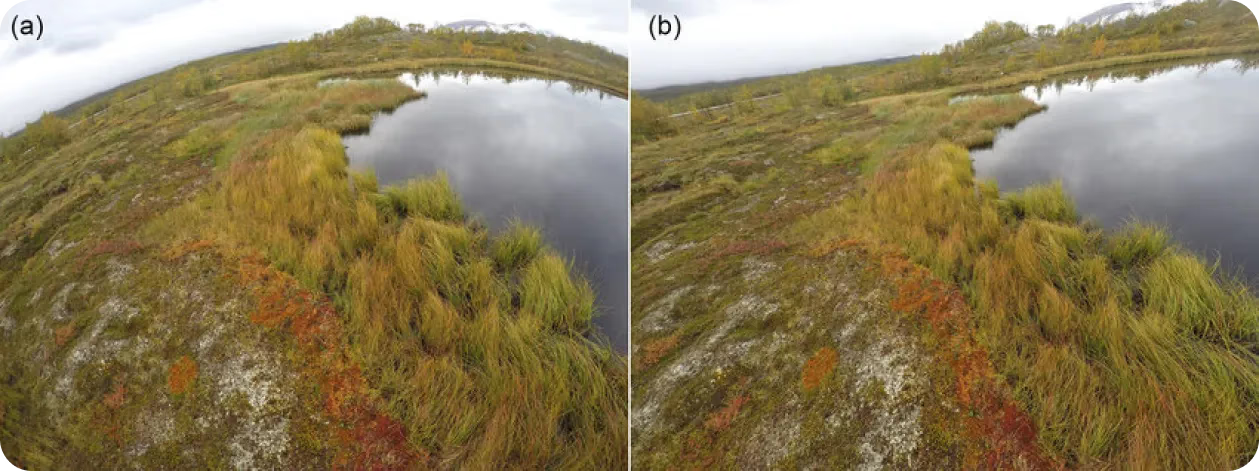
Fig 1. Un ejemplo de distorsión de lente (a la izquierda) corregida usando calibración de cámara (a la derecha).
Link to this sectionExplorando los efectos de la distorsión del objetivo#
Las distorsiones del objetivo pueden hacer que una cámara represente erróneamente las formas y posiciones de los objetos en una imagen. Aquí tienes algunos ejemplos de diferentes tipos de distorsiones de objetivo:
- Distorsión de barril: Aquí, las líneas rectas parecen curvarse hacia afuera, haciendo que los objetos en el centro de la imagen parezcan hinchados. Esto es común en lentes gran angular y puede interrumpir la calibración 3D en sistemas autónomos al distorsionar la percepción de profundidad.
- Distorsión de cojín: En este caso, las líneas rectas se doblan hacia adentro, hacia el centro de la imagen, creando el efecto opuesto a la distorsión de barril.
- Distorsión de bigote: Esto ocurre cuando se combinan las distorsiones de barril y de cojín, provocando que las líneas rectas se doblen en un patrón ondulado.
- Aberración cromática: Esto sucede cuando una lente no logra enfocar los colores en el mismo punto, creando franjas de color alrededor de los objetos.
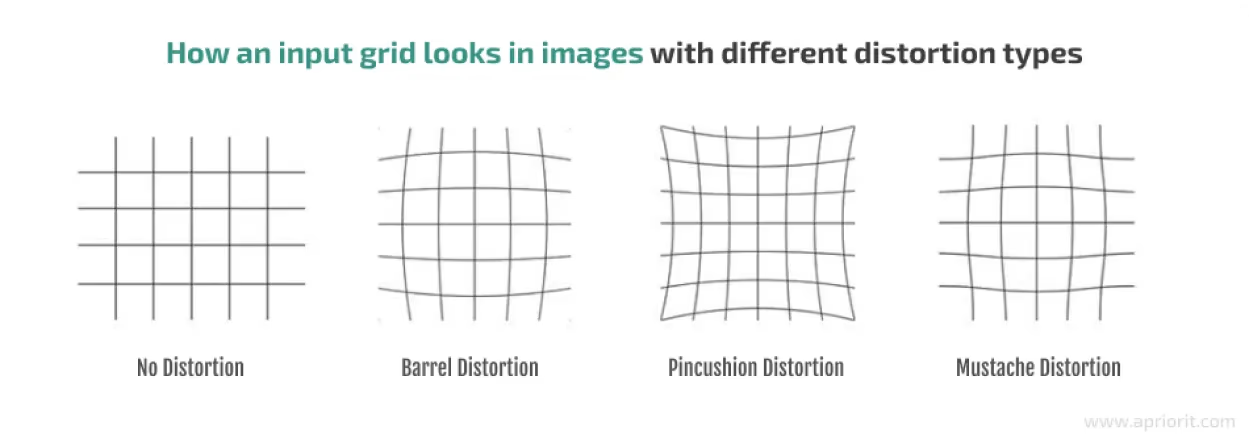
Fig 2. Diferentes tipos de distorsiones de lente.
Link to this sectionTipos de calibración de cámaras#
La calibración de cámaras consta de dos componentes clave: los parámetros intrínsecos, que definen las características internas de la cámara, y los parámetros extrínsecos, que determinan su posición y orientación en relación con el mundo. Analicemos más de cerca ambos tipos de componentes.
Link to this sectionParámetros intrínsecos#
Una calibración intrínseca precisa puede mejorar las predicciones del modelo asegurando que los objetos detectados aparezcan en la posición y escala correctas en aplicaciones del mundo real. Aquí tienes un vistazo rápido a algunos parámetros intrínsecos:
- Distancia focal: Controla cómo una cámara proyecta objetos 3D en una imagen 2D. Si está mal calibrada, los objetos pueden aparecer estirados o comprimidos, alterando su tamaño y distancia percibidos.
- Punto principal: Representa el centro óptico del sensor de la cámara. Si está desplazado, puede desplazar toda la imagen, lo que provoca una desalineación en la posición de los objetos.
- Coeficiente de inclinación (skew): Representa las disposiciones de píxeles no rectangulares en el sensor. Cuando hay inclinación presente, la imagen puede parecer inclinada o deformada en lugar de estar correctamente alineada.
- Coeficientes de distorsión: Estos parámetros corrigen las distorsiones ópticas causadas por la lente. Sin corrección, las líneas rectas pueden parecer curvas, especialmente cerca de los bordes de la imagen.
Link to this sectionParámetros extrínsecos#
La calibración extrínseca determina cómo se posiciona y orienta una cámara en relación con el mundo real, lo cual es especialmente importante en sistemas multicámara utilizados para la calibración 3D, el seguimiento de objetos y la percepción de profundidad. Ayuda a drones, vehículos autónomos y sistemas de vigilancia a interpretar con precisión las relaciones espaciales.
Aquí tienes dos parámetros extrínsecos clave:
- Matriz de traslación: Define la ubicación física de la cámara en el espacio 3D, especificando su posición a lo largo de los ejes X, Y y Z. Si está mal calibrada, los objetos pueden parecer más cercanos o lejanos de lo que realmente están, lo que lleva a mediciones de distancia incorrectas. En vehículos autónomos, esto puede resultar en una detección deficiente de obstáculos, mientras que en robótica, puede causar errores de posicionamiento durante la manipulación de objetos.
- Matriz de rotación: Determina la orientación de la cámara especificando cuánto está inclinada, girada o angulada en relación con un punto de referencia. Si no se calibra correctamente, las imágenes de múltiples cámaras pueden no alinearse adecuadamente, causando problemas en la reconstrucción 3D, el seguimiento multicámara y el mapeo espacial. Por ejemplo, en un coche autónomo, una matriz de rotación incorrecta podría desalinear las entradas del sensor, lo que llevaría a una detección de carril inexacta.
Link to this sectionConociendo la matriz de calibración de la cámara#
Cada imagen capturada por una cámara es una representación 2D de un mundo 3D. Los modelos de IA necesitan una forma de traducir entre estas dimensiones para hacer predicciones precisas. Aquí es donde entra en juego la matriz de calibración de la cámara. Mapea los puntos del mundo real sobre el plano de imagen de la cámara para que los objetos aparezcan correctamente posicionados.
En pocas palabras, la matriz de calibración de la cámara es un modelo matemático que representa los parámetros intrínsecos de una cámara. Por lo general, se almacena en sistemas de visión y se utiliza en algoritmos de procesamiento de imágenes para corregir distorsiones y mapear puntos 3D a coordenadas 2D.
Como veremos a continuación, la matriz se calcula utilizando métodos de calibración como la detección de patrones de tablero de ajedrez, la calibración basada en objetos 3D y la autocalibración basada en IA, los cuales estiman parámetros clave analizando imágenes de puntos de referencia conocidos.
Link to this sectionVarios métodos de calibración de cámaras#
Existen varios métodos de calibración de cámaras, cada uno adecuado para casos de uso específicos. Los métodos tradicionales se basan en patrones físicos, mientras que las técnicas impulsadas por IA utilizan aprendizaje profundo para automatizar el proceso.
Repasemos estos métodos y exploremos cómo mejoran la precisión en diferentes aplicaciones.
Link to this sectionMétodos tradicionales de calibración de cámaras#
Uno de los métodos de calibración de cámaras más comunes utiliza un tablero de ajedrez o un patrón de cuadrícula colocado frente a la cámara. El sistema detecta puntos clave en el patrón para calcular los parámetros de calibración.
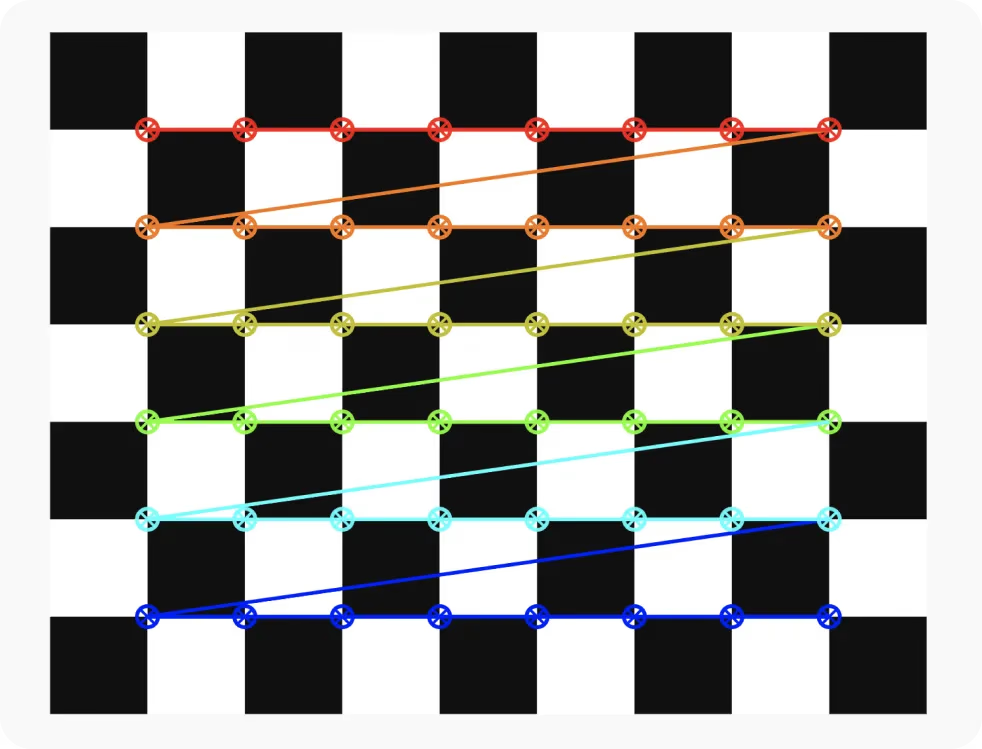
Fig 3. Un tablero de ajedrez de calibración de cámara.
Aunque es útil en entornos controlados, requiere ajustes manuales y el análisis de múltiples imágenes desde diferentes ángulos. Los cambios en las condiciones de iluminación o los movimientos inesperados de la cámara pueden reducir la precisión, haciendo necesaria una recalibración.
En entornos dinámicos, como drones y coches autónomos, la calibración tradicional tiene dificultades para seguir el ritmo. Una cámara en movimiento requiere una recalibración frecuente para mantener la precisión, lo cual es poco práctico con patrones estáticos. Esta limitación ha impulsado los avances en la calibración de cámaras mediante IA, ofreciendo mayor flexibilidad y automatización.
Link to this sectionMétodos de calibración de cámaras impulsados por IA#
Las técnicas impulsadas por IA automatizan la calibración de cámaras mediante el uso de modelos de aprendizaje profundo para autocalibrarse, reduciendo la necesidad de ajustes manuales. Estos métodos estiman los parámetros intrínsecos y extrínsecos directamente de las imágenes del mundo real, eliminando la necesidad de patrones predefinidos.
Del mismo modo, los conjuntos de datos sintéticos están transformando la calibración de cámaras al proporcionar a los modelos de IA datos de entrenamiento diversos y etiquetados para refinar los parámetros y corregir las distorsiones. Estos conjuntos de datos simulan las condiciones del mundo real, ayudando a los modelos de IA a aprender a ajustar los parámetros intrínsecos y extrínsecos de forma dinámica sin intervención humana.
Por ejemplo, los frameworks de autocalibración utilizan modelos probabilísticos y aprendizaje profundo para analizar imágenes monoculares, estimar estructuras 3D y refinar continuamente la calibración. Los datos sintéticos mejoran este proceso al entrenar modelos para manejar perspectivas variables, desalineaciones de sensores y condiciones de iluminación, mejorando la estimación de la profundidad, el seguimiento de obstáculos y la precisión espacial en aplicaciones como la conducción autónoma y la robótica.

Fig 4. Un sistema de visión artificial autocalibrable que puede entender el tráfico.
Link to this sectionAplicaciones clave de la calibración de cámaras#
Ahora que entendemos qué es la calibración de cámaras, exploremos su impacto en diversas industrias.
Link to this sectionVehículos autónomos y navegación de drones#
Para los coches autónomos y los drones autónomos, una calibración precisa de la cámara es importante para una navegación segura y fiable. Estos sistemas dependen de la estimación de la profundidad y del cálculo de distancia para detectar obstáculos, rastrear las marcas viales y evaluar los objetos circundantes. Una calibración deficiente puede provocar interpretaciones erróneas de la distancia, lo que conduce a decisiones incorrectas en escenarios en tiempo real.
Una matriz correctamente calibrada permite a los vehículos autónomos fusionar entradas de LiDAR, radar y cámaras, mejorando la fusión multisensorial. Esto ayuda al vehículo a medir con precisión las distancias a peatones, límites de carril y coches cercanos, reduciendo el riesgo de accidentes. Mientras tanto, en los drones, la calibración 3D ayuda a mantener la estabilidad de la altitud y rastrear objetos con precisión para una navegación precisa en entornos dinámicos.

Fig 5. Una cámara calibrada en un coche autónomo.
Link to this sectionRealidad aumentada (AR) y realidad virtual (VR)#
Las aplicaciones de AR y VR dependen de una calibración precisa de la cámara para alinear el contenido digital con los objetos del mundo real. Si no se calibran correctamente, las superposiciones de AR pueden desviarse, aparecer desalineadas o escalarse incorrectamente, interrumpiendo la experiencia del usuario.
La corrección de la distorsión del objetivo es clave para hacer que los objetos virtuales se mezclen perfectamente en entornos reales. Sin ella, las distorsiones pueden romper la inmersión y reducir la precisión en juegos, simulaciones de entrenamiento e imágenes médicas. Además de eso, en VR, la calibración mejora el seguimiento preciso de los movimientos de la cabeza y las manos, mejorando la capacidad de respuesta y creando una experiencia más fluida e inmersiva.

Fig 6. Una configuración de calibración de cámara 3D que se utiliza para refinar las mediciones espaciales.
Link to this sectionVisión robótica y automatización industrial#
Para que los robots vean e interactúen con el mundo con precisión, una calibración adecuada de la cámara es crucial. En la automatización industrial, los robots dependen de la estimación de la profundidad para recoger, colocar y manipular objetos con precisión. Sin una calibración adecuada, las desalineaciones pueden causar errores en el embalaje, el montaje y las inspecciones de control de calidad.
Uno de los principales retos en robótica es medir con precisión objetos planos. La calibración ayuda a los brazos robóticos a detectar dimensiones exactas, evitando errores de cálculo que podrían ralentizar o interrumpir la producción. La calibración 3D da un paso más al permitir que los robots se adapten a medida que cambian los objetos o las posiciones.
Link to this sectionConclusiones clave#
La calibración de cámaras es un componente crítico de muchas soluciones de visión artificial. Garantiza que los modelos de IA interpreten las imágenes con precisión para tareas como la detección de objetos, el seguimiento y la estimación de la profundidad. Los parámetros intrínsecos y extrínsecos ayudan a alinear las imágenes con las medidas del mundo real para evitar distorsiones que podrían afectar a las aplicaciones impulsadas por IA.
La corrección de la distorsión del objetivo es fundamental para aplicaciones de realidad aumentada, automatización industrial y sistemas multicámara. A medida que avanza la IA, los métodos de calibración automática de cámaras están mejorando la eficiencia, la precisión y la fiabilidad a largo plazo en aplicaciones del mundo real.






